
2024年04月10日下午16:30,TOPS第140期组会于通达馆A102会议室线下举行。本次组会由2019级博士李建强与大家交流讨论《城市道路交叉口非机动车轨迹预测》的相关内容。课题组老师同学出席了本次组会。会议开始前,倪颖老师介绍了李建强的研究主题。汇报时刻李建强首先介绍了研究背景。现阶段自动驾驶车辆(AV)与非机动车存在频繁交互,而非机动车具有更高的主动安全需求,而准确的轨迹预测是实现机非安全交互的前提。而目非机动...
阅读() | 撰稿 孙宇柔 2024年04月11日 10:45:54
2024年3月22日,由同济大学孙剑教授担任项目负责人的“十四五”国家重点研发计划“交通载运装备与智能交通技术”重点专项“自主式交通系统计算技术”项目启动会暨实施方案咨询审议会在我校顺利召开。公安部交通管理科学研究所俞春俊副所长,中国科学院自动化研究所吕宜生研究员,住建部城市交通工程技术中心马林教授级高工,中国智能交通协会关积珍副理事长,北京邮电大学科学技术研究院冯志勇院长,公安部道路交通安全研究中心...
阅读() | 撰稿 2024年03月25日 11:13:13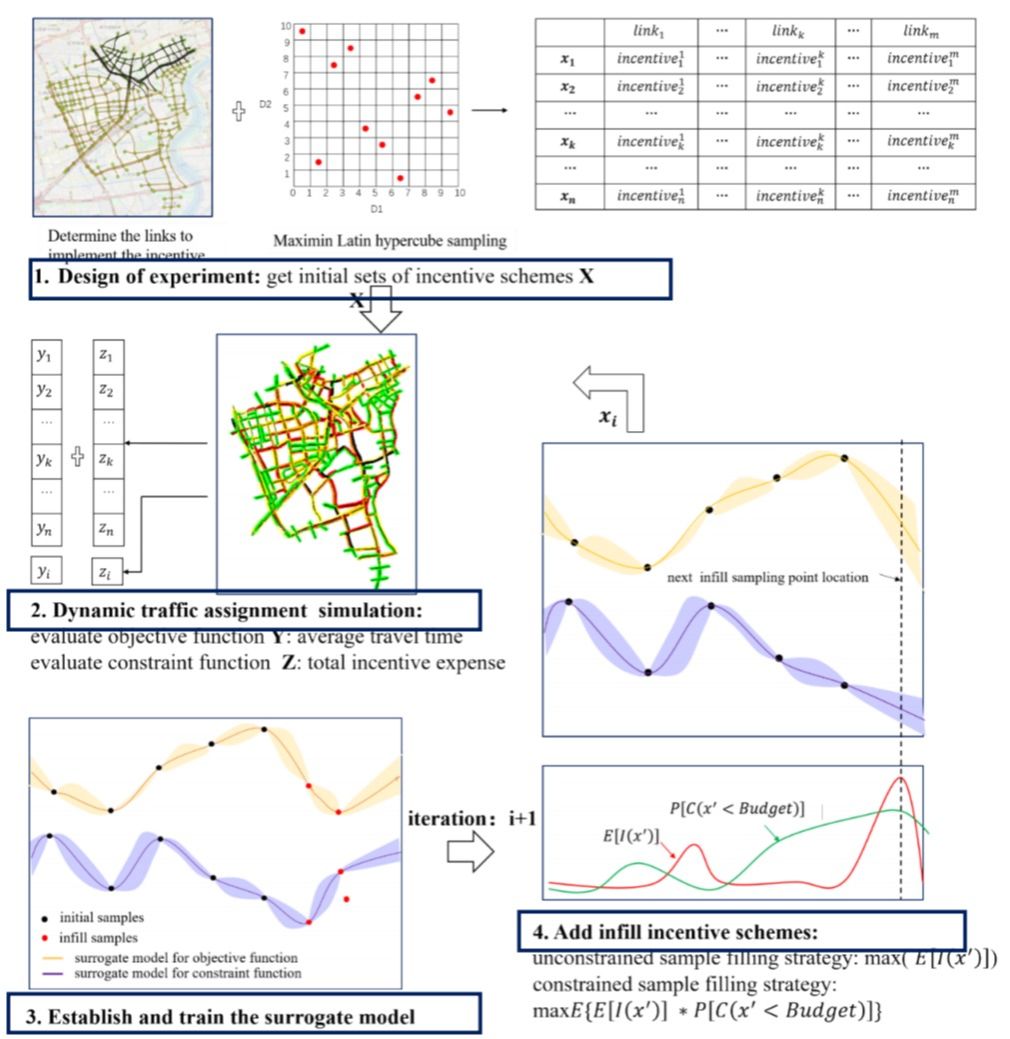
2024年3月20日下午16:30,TOPS第139期组会于通达馆A211会议室线下举行。本次组会由2018级博士付全路与大家交流讨论《基于代理优化的路网奖励方案研究》的相关内容。课题组老师同学出席了本次组会。汇报时刻 本次汇报分为:研究背景、研究内容与方法、结果分析和结论与展望四个部分,付全路首先介绍了研究背景,指出目前交通拥堵问题日益严峻的现状,同时说明了解决交通拥堵的两大措施为增加交通供给和交通需求...
阅读() | 撰稿 朱玉寒 2024年03月21日 17:59:37
2024年3月16日,OnSite自动驾驶测试服务平台建设研讨会暨第二届OnSite自动驾驶算法挑战赛启动会在桂林理工大学屏风校区图书馆报告厅盛大开幕。国家自然科学基金委相关领导、桂林理工大学王敦球校长、中国汽车工程学会副秘书长赵立金先生、挑战赛特邀技术委员会专家以及行业高校企业代表出席会议。第二届OnSite自动驾驶算法挑战赛启动会现场启动会首先由桂林理工大学校长王敦球发表致辞,他向应邀而来的各位专家表示感谢。他表示...
阅读() | 撰稿 2024年03月20日 16:51:08
2024年3月6日下午16:30,TOPS第138期组会于通达馆A102会议室线下举行。本次组会由2020级博士邱树涵与大家交流讨论《面向大规模车辆路径推断:深度路径选择模型》的相关内容。课题组老师同学出席了本次组会。汇报时刻 邱树涵首先介绍研究背景。路径是精细观测与精准管控城市交通系统的基础,而现有的检测数据难以全面捕捉路径,拉格朗日检测和欧拉检测数据各具优缺点,但两者在空间覆盖和车辆个体覆盖层面具有一定的互补性。有...
阅读() | 撰稿 崔一鸣 2024年03月14日 13:31:27
2024年1月20日下午,TOPS课题组2023年度总结会成功举办,出席此次年会的有孙剑教授、倪颖副教授、田野副教授、杭鹏副教授、岳李圣飒助理教授、秦国阳博士、梁浩阳博士、孙杰博士,来自宁波工程学院的董升副教授、周继彪博士,部分毕业工作的课题组成员以及全体TOPS在读学生。在2023年中,TOPS的全体成员能够保持高效的学习与科研节奏,获得一系列的产出及荣誉。值此辞旧迎新之际,TOPS细数2023年的点点滴滴,从与会人员介绍、学...
阅读() | 撰稿 叶轶淳 2024年02月11日 18:31:40
1月6日早晨从上海出发,途经北京转机,16小时万余公里的航行,我们了抵达华盛顿。美航客机的标志性尾翼华盛顿的街道鲜活的思想是会议的盛宴TRB召开的时间为1月7日-11日,每天都有大量的Poster与Presentation,使用TRB的官方app,可以根据时间、主题、位置对会议中的活动进行详细的分类和搜索,十分便捷。除了自己的Poster需要到场以外,小伙伴们都提前在app上详细了解好感兴趣的研究后,规划了自己的时间和路线。TRB年会的Poste...
阅读() | 撰稿 朱奕昕,魏书樵 2024年02月09日 12:38:30
2024年1月28日,四川蜀道投资集团有限责任公司到访同济大学交通运输工程学院,针对与TOPS课题组合作的《科技创新2030——"新一代人工智能"重大项目:公路交通系统全息感知与数字孪生技术及应用示范项目》开展了2023年度调研会。同时到访的还有四川蜀道智慧交通集团有限公司、四川数字交通科技股份有限公司、东南大学、交通运输部公路科学研究所 、上海平可行智能科技有限公司等多家单位和高校共17人。TOPS课题组田野老师作为项...
阅读() | 撰稿 朱玉寒 2024年01月31日 23:12:02
2023年12月28日下午16:30,TOPS第137期组会于通达馆A102会议室线下举行。本次组会由2021级博士张赫与大家交流讨论《面向不同稀有度的自动驾驶风险场景加速测试方法研究》的相关内容。课题组老师同学出席了本次组会。汇报时刻张赫首先介绍了研究背景。自动驾驶事故率高,因此其安全性必须经过严格的测试验证,而基于场景的虚拟仿真测试能够有效解决传统路测的限制。研究针对搜索危险场景的“证伪”问题与统计危险率的“确认”问...
阅读() | 撰稿 尹恒 2024年01月11日 23:14:33
2023年12月14日下午16:30,TOPS第136期组会于通达馆A102会议室线下举行。本次组会由由2020级博士赵晓聪与大家交流讨论《多对象混驾场景自动驾驶交互式运动规划》的相关内容。课题组老师同学出席了本次组会。汇报时刻赵晓聪首先介绍了研究背景。近年来人机混驾事故高发,交互与运动规划相关的接管致因在近三年的技术迭代中,尚未得到有效解决。而现有路测中的预测驾驶行为与仿真中类似,即假定周围社会车辆或行人机械化地沿固定...
阅读() | 撰稿 石坚 2023年12月14日 22:21:10电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}