
为了迎接新学期,增进课题组老师与2023级新生的了解,帮助TOPS课题组2023级新生更好地熟悉课题组,快速实现研究生身份转变,2023年7月11日9:00-11:30,同济大学交通运输工程学院TOPS课题组在通达馆554召开研究生新生见面会。与会成员有TOPS课题组全体老师及2023级17位硕博新生,新同学依次进行了简单的自我介绍,并表示了对未来在TOPS课题组学习的期望与憧憬。孙剑老师进行课题组情况介绍。TOPS发展过程中始终注重“理论实践协...
阅读() | 撰稿 崔一鸣 2023年07月13日 15:34:31
有朋自远方来,又赴远方。又是一年毕业季,2023届的毕业生满载期许与坚韧,以严谨对学术,以热情对生活,为研究生生活划上了完美的句号,也为TOPS课题组书写下精彩独特的篇章。TOPS课题组合照明朝即长路,惜取此时心。在这里,2023届毕业生还有一些心里话想分享给大家。叶神:嘉园的花谢了又开,邻座的同学们来了又走,终于也迎来自己毕业时分。作为在读钉子户,能够毕业,离不开课题组方方面面的帮助。尤其感谢孙老师的栽培,...
阅读() | 撰稿 2023届毕业生 2023年07月09日 18:33:41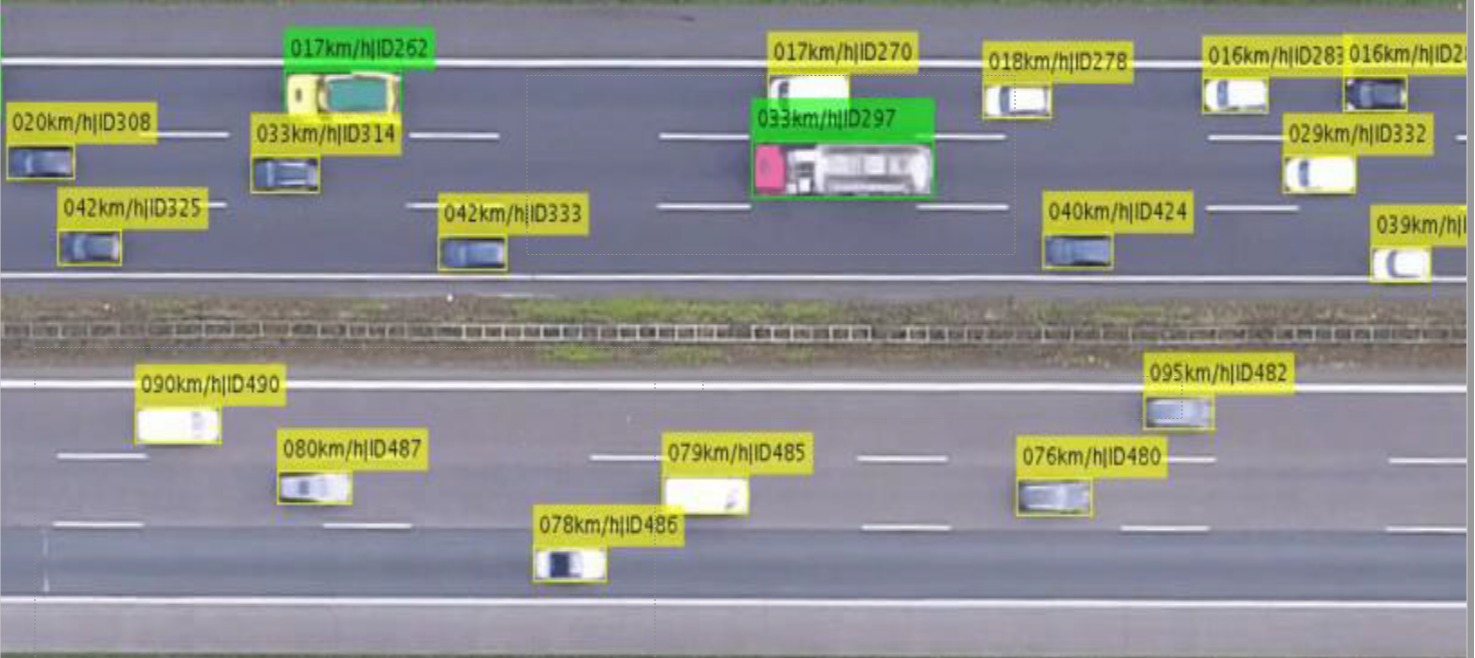
2023年7月8日,TOPS第128期组会于通达馆A436线下线上同时进行。本次组会邀请了加拿大麦吉尔大学(McGill University)土木工程系的孙立君老师与我们分享《Calibrating Car-Following Models via Bayesian Dynamic Regression》的相关内容,课题组全体师生出席了本次会议。孙立君老师汇报时刻孙立君老师首先对经典车辆跟驰模型——IDM模型进行深入剖析。传统的IDM模型基于即时前后车数据建立简单非线性函数,其对历史信息的忽略...
阅读() | 撰稿 陈前 2023年07月09日 18:14:00
由TOPS课题组田野副教授、孙剑教授,交通运输部科学研究院刘好德研究员等作为主要完成人参与的项目《大规模城市交通系统中观建模仿真技术及工程应用》荣获2022年度中国交通运输协会科学技术奖一等奖。城市交通系统现代化综合治理是国家重大战略需求的聚焦点。近年来,城市交通系统呈现出大规模、精细化、新业态的新特点,极大增加了治理决策的难度。中观交通仿真可以实现针对大规模路网的精细化评估分析,是城市交通决策治理现...
阅读() | 撰稿 肖琳 2023年07月06日 08:12:19
2023年6月30日,第一届OnSite自动驾驶算法挑战赛答辩会议在同济大学嘉定校区通达馆正式举行。本次答辩会议由赛事裁判长王建强教授,赛事裁判委员会秘书田野副教授共同主持,挑战赛特邀15名裁判委员会专家以及8支成绩优胜的参赛队伍代表出席会议。第一届OnSite自动驾驶算法挑战赛答辩会议现场作为汽车领域的国际前沿科技,近年来,国家自然基金委资助了大量自动驾驶相关研究,有力推动了自动驾驶技术的进步。为进一步促进自动驾...
阅读() | 撰稿 郑文涛 2023年07月04日 12:35:02
2023年6月19日13时,TOPS课题组18级博士生叶颖俊和17级博士生李逸昕的博士学位论文答辩在通达馆517顺利举行。本次答辩会议由浙江大学金盛教授、上海理工大学赵靖教授、同济大学唐克双教授、同济大学孙剑教授、同济大学倪颖副教授担任答辩委员会委员,由东南大学王昊教授担任答辩委员会主席,岳李圣飒老师担任答辩秘书。叶颖俊博士的答辩论文题目为《快速路汇入区瓶颈交通流建模仿真与失效机理研究》,李逸昕博士的答辩题目为《...
阅读() | 撰稿 范镓麟 2023年06月21日 13:33:09
2023年6月19日7时,TOPS课题组20级硕士研究生杨逸琳、黄浩宇、邵英豪、刘懿如、陈秋冰、李政、杨叶笛7位师兄师姐的毕业答辩在学院楼517会议室顺利举行。同济大学杭鹏老师任答辩秘书,答辩委员会由同济大学柴晨副教授、孙剑教授、倪颖副教授、田野副教授组成,其中柴晨副教授担任答辩委员会主席。各位同学硕士毕业论文的主要工作如下:1.杨逸琳《异质非机动车跟驰行为分析与建模》。杨逸琳首先介绍了研究背景与现状,包括非机动...
阅读() | 撰稿 杨宇豪 2023年06月20日 13:12:59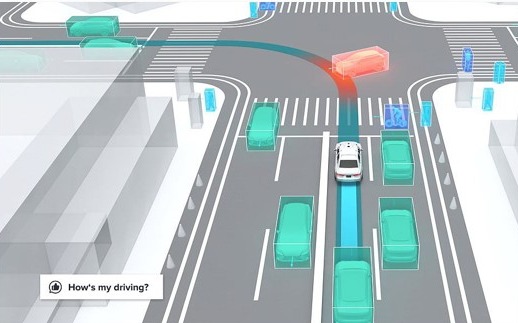
2023年6月9日,TOPS课题组第127期组会在通达馆A436室线下线上同时进行。本次组会由2022级硕士生刘佳琦与大家交流讨论了《基于强化学习和Transformer的无信号交叉口自动驾驶运动决策》的相关内容。课题组的全体老师和同学出席了本次组会。汇报时刻刘佳琦首先介绍了研究背景,自动驾驶汽车在无信号交叉口等复杂动态环境下的交互与决策存在很多困难,目前用于无信号交叉口自动驾驶协同决策的方法主要包括基于博弈模型、优化模型、...
阅读() | 撰稿 梅月雯 2023年06月12日 22:56:44
2023年5月18日,TOPS课题组第126期组会在通达馆A436室线下举行。本次组会由22级硕士生赵东虎为大家介绍《无保护左转场景下HMI信息效用评估实验》的相关内容,课题组全体师生出席了本次会议。汇报内容汇报分为研究背景、实验方案设计、实验概况和结果分析四大板块展开。赵东虎同学首先介绍了研究背景:通行权不明确是多数交叉口自动驾驶事故的致因。明确通行权的方式除交通规则外,还包括隐式交流和显式交流。虽然很多隐式交流方...
阅读() | 撰稿 蔡依林 2023年05月19日 08:20:06
2023年5月4日,TOPS课题组第125期组会在通达馆A436线上线下同时召开。本次组会由2021级博士生黄䶮和大家交流讨论了《OnSite平台现状及研究方向介绍》的相关内容。课题组全体老师和同学出席了本次组会。黄䶮汇报时刻公开自然驾驶智能汽车仿真测试环境(OnSite)是一个为高等级自动驾驶汽车的感知、决策、规划、控制等模块提供测评服务的公共平台。黄䶮首先介绍了OnSite平台建设的背景及意义,并基于平台官网(https://onsite.run/...
阅读() | 撰稿 范镓麟 2023年05月05日 10:35:43电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}