2023年12月28日下午16:30,TOPS第137期组会于通达馆A102会议室线下举行。本次组会由2021级博士张赫与大家交流讨论《面向不同稀有度的自动驾驶风险场景加速测试方法研究》的相关内容。课题组老师同学出席了本次组会。
汇报时刻
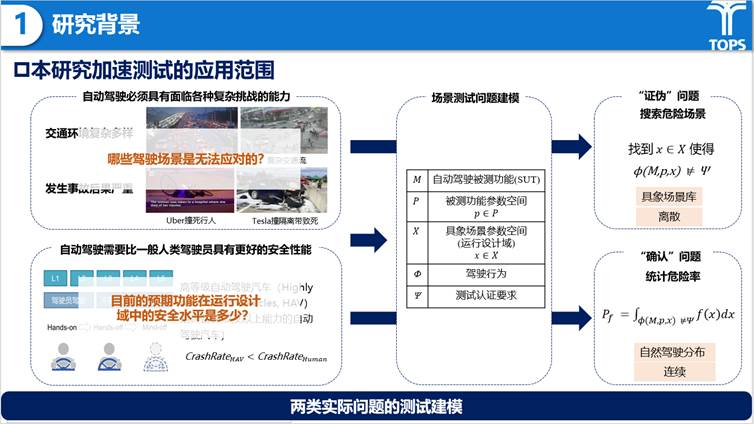
张赫首先介绍了研究背景。自动驾驶事故率高,因此其安全性必须经过严格的测试验证,而基于场景的虚拟仿真测试能够有效解决传统路测的限制。研究针对搜索危险场景的“证伪”问题与统计危险率的“确认”问题进行测试建模,针对不同危险程度、稀有程度的场景设计不同的加速测试方法。
汇报内容
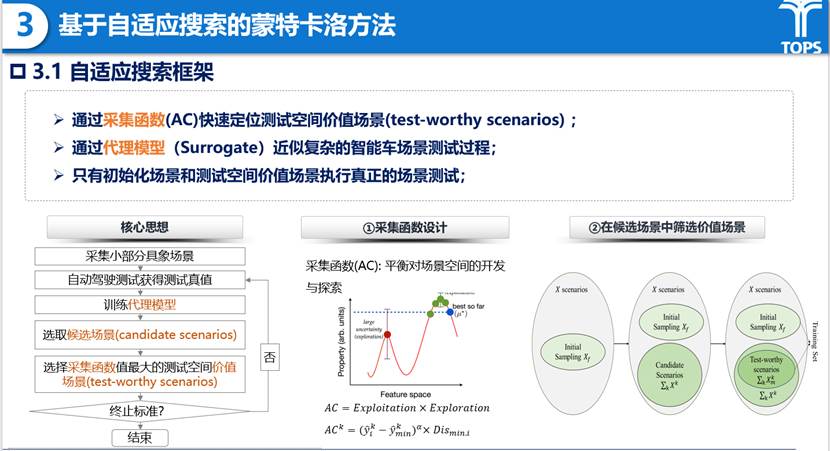
接下来,张赫详细介绍了两种方法。第一种是基于自适应搜索的蒙特卡洛方法。自适应搜索的框架中,通过采集函数(AC)快速定位测试空间价值场景,并通过代理模型(Surrogate)近似复杂的智能车场景测试过程。模型的参数标定可以根据测试空间的维度和搜索目标的稀有程度进行相应的调整。采集函数中的开发部分,由代理模式输出;为保证方法效果,需要进行代理模型比选,选择了3个插值代理模型和3个回归代理模型。在比选阶段,先通过遍历测试获得风险场景真值,设置“搜索全覆盖”或“测试样本有限总量”为终止条件,从而选取最优代理模型将与蒙特卡洛相结合,并进行了靶向搜索效果的展示。此方法在小概率事件有着加速优势,但存在稀有事件的加速局限。
汇报内容
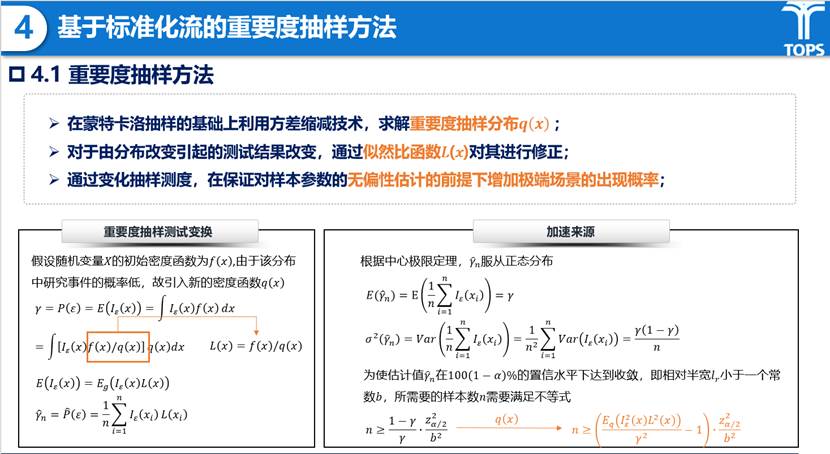
针对稀有事件,研究提出基于标准化流的重要度抽样方法。在蒙特卡洛抽样的基础上利用方差缩减技术,难点在于求解重要度抽样分布𝒒(𝒙),该分布对稀有事件长尾分布的拟合度决定了加速效果。为了解决这个难点,提出了引入标准化流模型靶向学习稀有事件的分布。其中,标准化流具体形式选择Masked Autoregressive Flow,在逐步映射的过程中不断(更易)获得更多的碰撞场景作为学习样本。在小概率危险场景与稀有危险场景下分别用上述两个方法进行评估,大大提高了效率,节省测试场景的数量。
汇报内容
接下来,张赫提出研究现有的难点在于交通场景的高维性,并提出了时序高维与交互对象高维的预期解决方案。最后,张赫讲述了她的联培经历,分享了学习软件工程知识的心得。

联培分享
在交流讨论环节,2021级博士张小卉对标准化流模型的目的及训练过程进行了提问,同时分享了扩散模型的原理及优势,探讨了其与标准化流模型的区别与相似性;2014级博士马子安提问了标准化流模型迭代的具体方式,并就如何选出高频样本进行了提问,同时自适应搜索场景可以结合碰撞率等统计指标去提高选取场景的价值;2023级硕士叶轶淳对蒙特卡洛搜索场景中,在搜索样本较大的情况下,重复场景是否会导致效率较低进行了提问;2021级硕士傅澳晖对标准化流迭代起始时,寻找第一个危险场景所需的资源是否会较大进行了提问。
孙剑老师对研究在应对稀有与高维场景的优势进行了提问,建议在对比实验中可以进一步突显出研究的潜力,并对驾驶风格生成的目的进行了提问;岳李圣飒老师对流模型收敛时,最终的分布与真实分布之差进行了提问,并提问了自适应搜索时的场景遗漏问题;梁浩阳老师对标定过程的复杂度、可迁移性如何进行了提问,并指出评估结果中测试时间没有减少,提问了该结果的原因;秦国阳老师提出在高维场景中,由于观测有限,分布是变化、不确定的,建议实际测试中可以将其作为评价因素;杭鹏老师建议展示可以加入更具体的风险场景介绍,将对应的场景描述放到每一步的分析中;倪颖老师提问重要度抽样方法是否也能有效处理小概率危险场景,并对其机理进行了提问;田野老师建议展示时可以构建时间线,将内容与各部分同学所熟悉的框架对应,以便更好地进行交流。
最后,吕志超老师进行了自我介绍与未来工作展望,TOPS的成员们表示了热烈欢迎。孙剑老师进行了总结,讲述了课题组“脱虚入实”的宗旨,并鼓励大家实际场景测试,提高工作的影响力。
至此,本次组会圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}