2023年12月14日下午16:30,TOPS第136期组会于通达馆A102会议室线下举行。本次组会由由2020级博士赵晓聪与大家交流讨论《多对象混驾场景自动驾驶交互式运动规划》的相关内容。课题组老师同学出席了本次组会。

汇报时刻
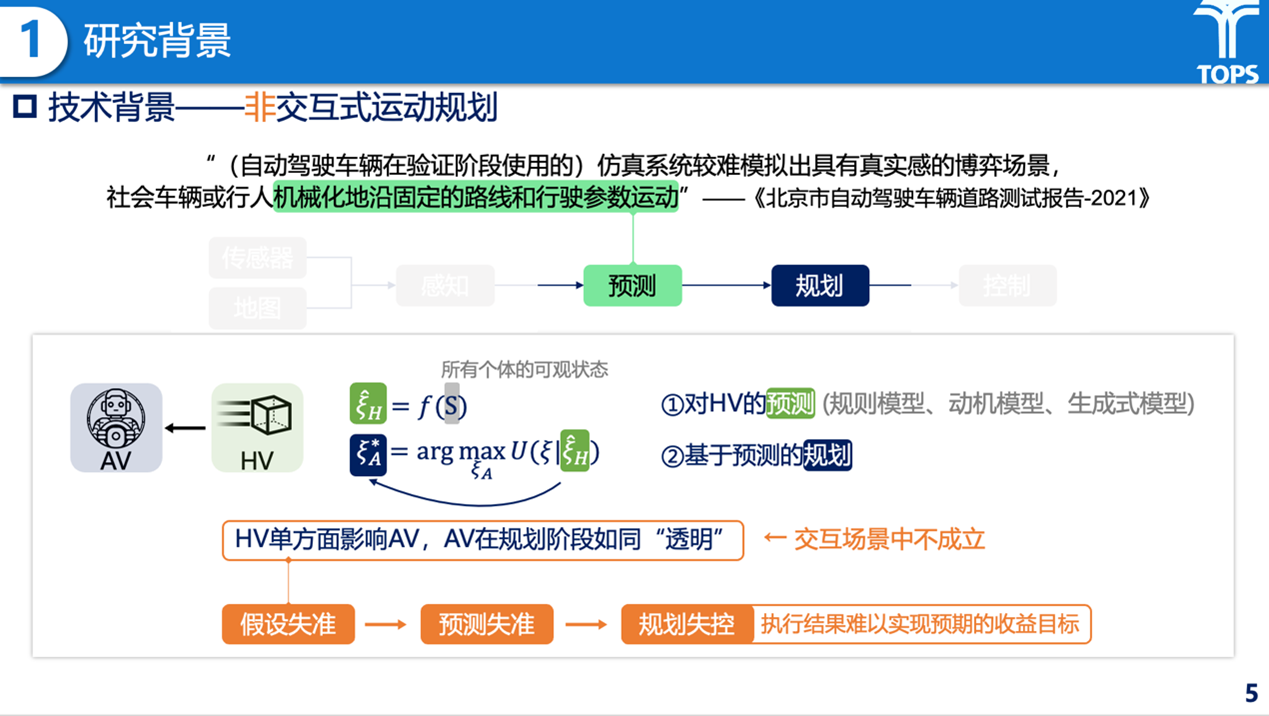
赵晓聪首先介绍了研究背景。近年来人机混驾事故高发,交互与运动规划相关的接管致因在近三年的技术迭代中,尚未得到有效解决。而现有路测中的预测驾驶行为与仿真中类似,即假定周围社会车辆或行人机械化地沿固定的路线和行驶参数运动,是基于静态预测的路径规划。这种假设在复杂的交互场景下并不成立,而在错误预测的基准下进行规划,将导致规划失控,执行结果难以实现预期的收益目标。而交互式运动规划对于会构建环境与自动驾驶汽车交互策略,基于交互策略进行规规划将预测转化为了对伴行对象的行为规划。
汇报内容
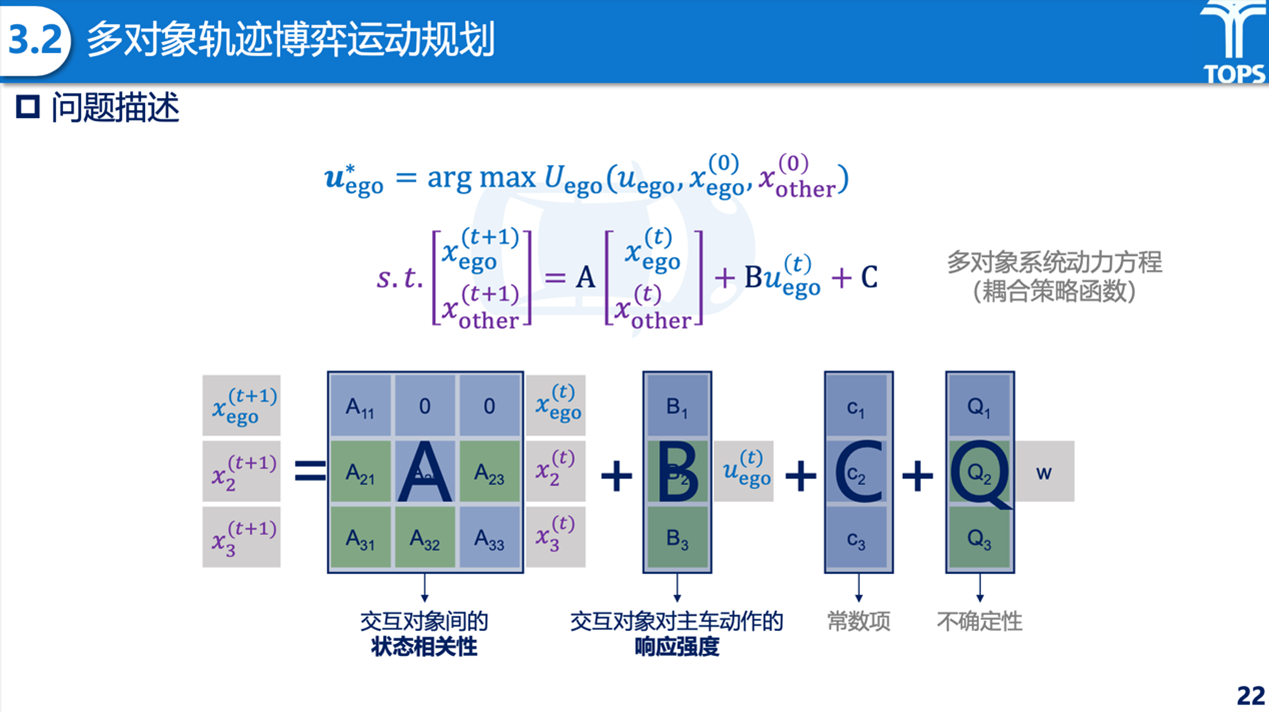
接下来,赵晓聪详细描述了多对象场景中的交互对象策略。其中将自动驾驶策略作为优化函数,将环境车作为隐式的博弈项,由此构建轨迹博弈求解均衡以获得规划轨迹。在此基础上考虑人决策时的社会倾向差异性,定义了交互倾向值来对不同的交互对象进行差异化处理。在复杂场景中单对象轨迹规划模型并不适用,因此提出了在多对象轨迹博弈问题中,构建了多对象系统动力方程即耦合策略函数。对于系统未来状态转移特征的求解,将自动驾驶车未来动作作为模型输入,提出了基于深度学习的多对象耦合策略模型。
汇报内容
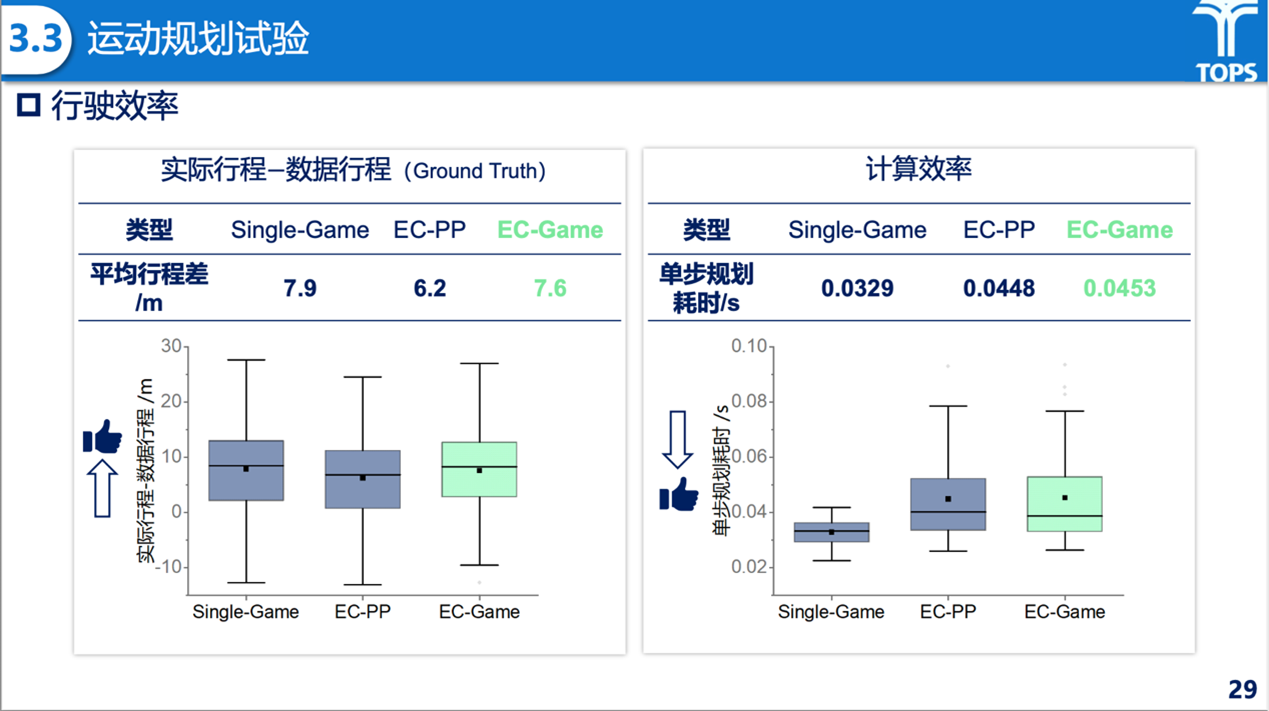
运动规划实验结果表明,在安全性方面,实际规划实验中的预测规划耦合模型以及先预测后规划模型均未发生碰撞;在行驶效率方面,单对象轨迹预测模型及先预测后规划模型的平均行程差均高于预测规划耦合模型;在计算效率方面,预测规划耦合模型耗时未发现明显的增加。
汇报内容
最后,赵晓聪分享了自己国外留学的收获及感受,对于自动驾驶与物理学科交叉方面提出了自己的见解。

汇报时刻
在交流讨论环节,2023级硕士生刘学凯对预测部分的输入内容、特征矩阵的动态变化及动力学方程中是否考虑周围车辆的不对成性等方面进行了提问;2021级博士生房世玉对多对象是否增加约束以及计算量等方面进行了提问;2023级博士生孔爱静对系统动力参数如何获取合适的参数以及该模型是否可拓展到多车编队进行了提问;2020级博士周东浩对该模型的求解效率、场景车辆对输出的影响运动规划预测结果分布描述、特征矩阵的物理含义等方面进行提问,并将该模型与transformer attention的影响量化进行对比。
梁浩阳老师对是否考虑历史信息及过去时长的量化进行提问,并建议深入探讨参数的物理含义以优化参数的可解释性;杭鹏老师对MATLAB模拟制造场景以及行人是否受控进行了提问,并建议再模型结果验证时从社会性角度来对比证明,提出章节主题更改为将博弈框架与深度学习相结合更符合研究内容;田野老师提出模型的可解释性有待加强,可从AV测试角度来验证周围车辆及行人的交互性,并提出可基于预测和决策来支撑生成场景,以交互特征作为衡量标准进行描述;秦国阳老师对于特征矩阵的训练及优化决策顺序进行了提问,并建议结合效用最大化理论,将将深度学习与效用函数结合。
最后,田野老师对本次组会中2024届新生的积极参与表示鼓励与肯定,并强调了TOPS 交通运行与仿真课题组管理章程的重要性,希望同学们仔细阅读以保证为大家提供清晰的指导,顺利完成研究项目并充分发挥潜力。
至此,本次组会圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}