
前言为积极响应和贯彻《交通强国建设纲要》精神,充分发挥行业优势,促进全国各高校交通运输工程学科及相关专业优秀学生之间的交流,增进各兄弟高校相关专业优秀学生对同济大学交通学院的了解,探索贯通的卓越工程师培养模式,同济大学交通学院于2026年7月13日至7月22日暑期成功举办“第八届同路人国际暑期讲堂(交通工程)”。报名情况本次讲堂采取“线下授课、课堂互动、日常考勤”的教学模式,吸引了来自同济大学、西南交通...
阅读() | 撰稿 张嘉欣 2026年07月25日 18:08:00
为总结2025级研究生在第一学年的研究进展与工作成果,促进课题组成员间的学术交流与相互借鉴,加强对研究生科研方向的规划与指导,2026年7月16日,同济大学交通学院TOPS课题组在通达馆举行了2025级研究生学年总结交流会。学年总结会顺利召开 2025级硕博学生依次进行了汇报,内容概要如下: 陈宇航分享了其在三维产品智能赛道构建与海康威视轨迹同步项目中的工作。在赛道构建方面,参与了核心技术开发与评价...
阅读() | 撰稿 林海 2026年07月25日 15:52:13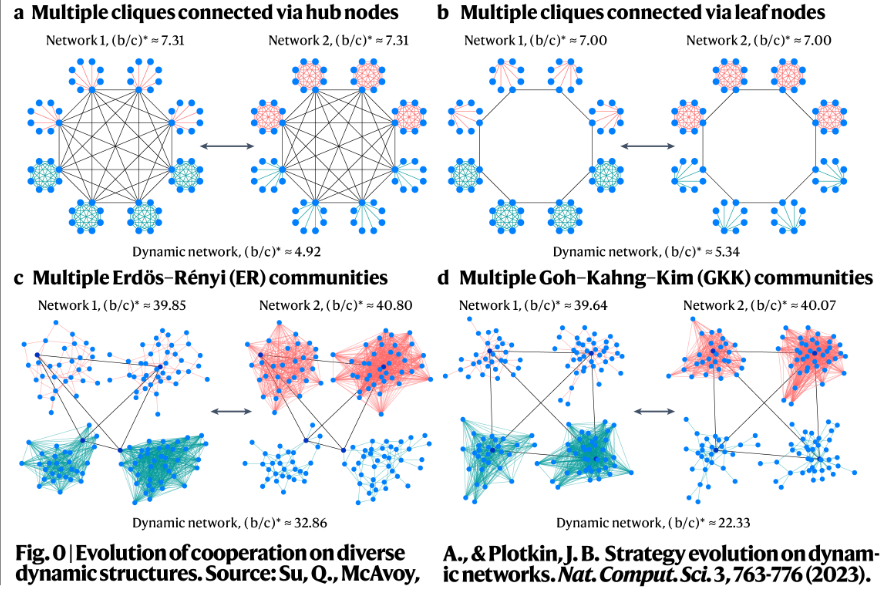
2026年7月9日,TOPS第185期组会于通达馆A102线下举行。本次组会由上海交通大学自动化与感知学院苏奇老师进行了以《动态网络上的演化博弈和群体智能》为主题的学术报告分享。课题组全体老师同学出席了本次组会。汇报时刻本次讲座聚焦于人工智能领域中以群体智能和博弈理论主导视角下的复杂网络问题的发展研究。本次分享报告有条不紊地从研究问题背景介绍到研究内容,再到最后系统性总结了复杂网络上的演化博弈等一系列进展。首先...
阅读() | 撰稿 刘钦沛 2026年07月14日 19:41:42
2026年7月2日,TOPS第184期组会于通达馆A102线下举行。本次组会由24级博士严周栋进行《自动驾驶紧急场景在线安全监测》主题的学术报告分享。课题组全体老师同学出席了本次组会。汇报时刻严周栋同学从研究背景与研究现状、研究内容和总结与展望三个方面展开介绍。在研究背景与研究现状方面,严周栋同学指出,自动驾驶测试与运行中安全问题仍较突出,国外Uber与国内特斯拉等事故案例表明,紧急场景下的风险预判和安全防护亟待加强...
阅读() | 撰稿 张嘉欣 2026年07月05日 10:09:23
为积极响应和贯彻《交通强国建设纲要》精神,充分发挥行业优势,促进全国各高校交通运输工程学科及相关专业优秀学生之间的交流,增进各兄弟高校相关专业优秀学生对同济大学交通学院的了解,探索贯通的卓越工程师培养模式,同济大学交通学院拟于2026年暑假举办“第八届同路人国际暑期讲堂(交通工程)”。活动介绍授课方式为提升同学们对于交通工程基础理论与应用技术的学识水平,促进全国各高校交通运输工程及相关专业优秀学生...
阅读() | 撰稿 张嘉欣 2026年06月27日 16:58:10
2026年6月11日,TOPS第183期组会于通达馆A102线下举行。本次组会由2022级博士朱奕昕进行以《驾驶人可计算认知行为建模与人机交互应用》为主题的学术报告分享。课题组全体老师同学出席了本次组会。汇报时刻朱奕昕同学从研究绪论、基于信息排队网络的驾驶员认知机理建模、基于动态认知的驾驶行为建模、可计算认知数字驾驶人的构建与人机交互应用、研究总结与展望五个部分展开介绍。研究绪论在研究绪论部分,朱奕昕同学首先从自动...
阅读() | 撰稿 谢安 2026年06月12日 13:10:09
2026年4月13日至4月17日,课题组博士后研究员赵晓聪老师和2024级博士生蒋溪彦作为代表前往西班牙巴塞罗那国际会议中心(Centre de Convencions Internacional de Barcelona)参加2026年ACM人因计算系统大会(ACM Conference on Human Factors in Computing Systems, CHI 2026)。本次会议汇聚了来自全球顶尖高校、科研机构与科技企业的人机交互领域研究者,围绕人机交互理论、智能系统设计、认知建模、人工智能与交互融合等前沿方向...
阅读() | 撰稿 蒋溪彦 2026年06月01日 13:23:43
2026年5月25日8:30,TOPS课题组20级博士生邱树涵和22级博士生范镓麟的博士学位论文答辩在通达馆600顺利举行。本次答辩会议由浙江大学金盛教授、同济大学邵敏华教授、同济大学孙剑教授、同济大学倪颖副教授、同济大学孙杰副教授担任答辩委员会委员,由东南大学任刚教授担任答辩委员会主席,同济大学孙海浩讲师担任答辩秘书。邱树涵博士的答辩论文题目为《稀疏观测条件下路网个体车辆出行路径重构方法研究》,范镓麟博士的答辩论...
阅读() | 撰稿 陈宇航 2026年05月29日 08:53:22
2026年5月28日,TOPS第182期组会于通达馆A102线下举行。本次组会由24级硕士赵梓皓进行以《基于舱驾融合信息的驾驶人主观风险认知辨识》为主题的学术报告分享。课题组全体老师同学出席了本次组会。图1 汇报时刻赵梓皓同学从研究背景、研究内容、实验结果和后续计划四个方面展开介绍。在研究背景方面,赵梓皓同学指出,尽管当前自动驾驶技术取得了快速发展,但在L2级等人机共驾场景下,接管阶段仍然是自动驾驶人机交互过程中的重...
阅读() | 撰稿 王吕洋 2026年05月28日 23:44:20
2026年5月19日,TOPS课题组硕士研究生黎瑞、罗曼、刘林坤、肖灵坤的学位论文答辩在通达馆A102会议室顺利举行。同济大学岳李圣飒老师任答辩秘书,答辩委员会由孙剑教授、倪颖副教授、田野教授、孙杰副教授以及杭州海康威视数字技术有限公司郑立勇高级工程师组成。各位同学硕士毕业论文的主要工作如下:1.黎瑞《基于博弈论的自动驾驶最优社会性研究》。黎瑞指出,自动驾驶汽车进入人机混驾环境后,其交互表现直接影响运行安全、通...
阅读() | 撰稿 徐佳美 2026年05月20日 16:21:16电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}