载运装备与路侧设施智能化驱动现代交通系统正全面向自主式交通系统(ATS)转型,呈现出“单体自主运行、群体自治组织、系统自洽管控”的新特征,同时也引发全新的问题和挑战,具体表现为“个体智能不足、交互机制缺失、系统控制不优”。

自主式交通系统新特征与新挑战
课题组聚焦自主式交通系统三大技术难题:(1)复杂人机混驾环境个体智能不足;(2)异智多主体交互机制缺失;(3)粒(单车)-流(交通流)群智控制不优。提出了基于端云融合数据闭环的稳定持续自进化自动驾驶决策框架,研究了“状态共享、 意图共享、协商决策、任务执行”多层级协同自动驾驶技术路线,发明了复杂人机混驾环境下粒流一体化群智协同控制方法,并基于同济大学车路云一体化自主式交通系统示范平台、自动驾驶实验车队、自主开发的协同驾驶计算平台、智能目标物等开展应用示范验证。

研究方向解读
1. 单体进化
针对现有自动驾驶汽车ODD碎片化、接管率高,难以实现跨域全场景自动驾驶的挑战,课题组提出了基于端云融合技术实现持续学习进化的单车智能解决方案;基于大脑互补学习认知理论,建立基于大语言模型类脑自进化决策框架,实现自动驾驶决策模型的稳定持续增量学习;面向复杂多任务决策场景,提出RL专家数据采样-离线预训练-在线微调的自进化决策GPT训练框架,提升GPT模型的决策泛化能力与自进化能力。
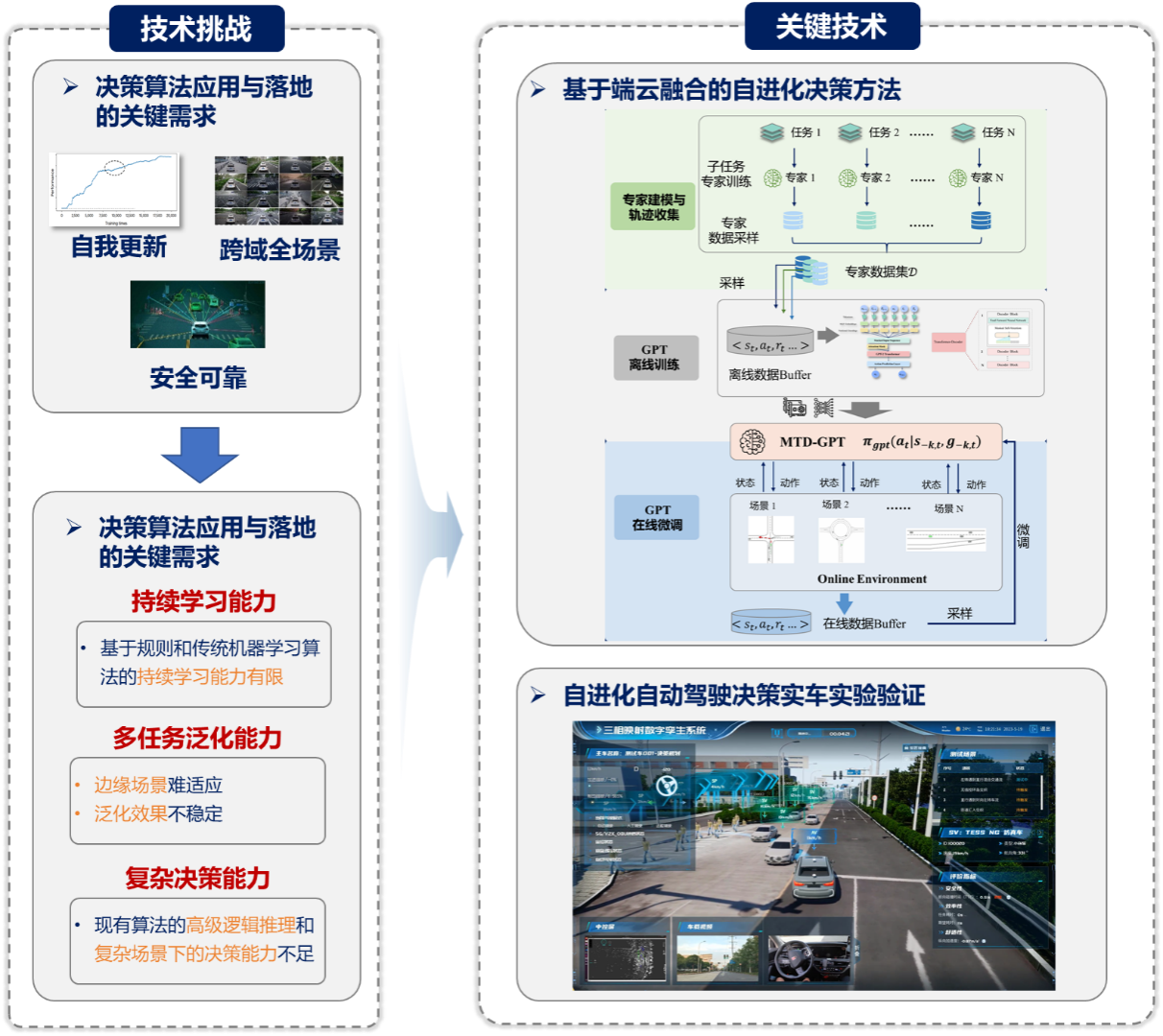
自进化自动驾驶决策
2. 多体协同
针对复杂驾驶环境下异智多主体交互失效的挑战,课题组提出了异智多主体协同增强的解决方案,可实现"状态共享、 意图共享、协商决策、任务执行"多层级协同增强;基于信息实时共享,建立面向异质多体的自适应协同博弈方法,有效提升自动驾驶的交互协同能力;面向人机混驾复杂交互环境,提出自组织协商决策框架,通过个体意图表达与群体协商达成通行权共识,分布式求解大规模车群冲突消解难题。

多层级协同自动驾驶
3. 粒流协控
针对车路群智控制不优的挑战,课题组提出了粒流一体化群智协同控制方法,采用图表征+群智协控同步实现个体与系统的均衡优化;基于图论表征复杂场景的车车交互关系,构建系统情景图与个体行为的映射关系,建立考虑系统情景的个体动作策略推演方法以及情景推理模型,实现粒(单车)-流(系统)一体化协同管控。

复杂人机混驾环境下粒流一体化群智协同控制
科研课题
国家重点研发计划项目(2023YFB4301900),自主式交通系统计算技术,2024-2026.
国家自然科学基金重点项目(U1764261),智能汽车路径规划与自主决策理论及关键技术,2018-2021.
上海市科技创新行动计划(23DZ1203400),基于多模态传感的自动驾驶关键技术及应用示范,2024-2026.
国家自然科学基金(52302502),人机混驾冲突场景下考虑主动交互的CAV协同决策方法研究,2024-2026.
“智能绿色车辆与交通全国重点实验室”开放基金重点项目(KFZ2408),复杂人机混驾场景下网联自动驾驶汽车协同决策,2024-2025.
“车路一体智能交通全国重点实验室”开放课题重点项目(2024-A002),自动驾驶车辆混合增强智能与群智控制,2024-2025.
中国科协“青年人才托举工程”(2022QNRC001),人机混驾智能协同决策,2023-2024.
中央高校学科交叉联合攻关项目(2023-4-YB-09),混合多主体智能交通系统安全理论与技术,2023-2025.
中央高校学科交叉重点项目(2022-5-ZD-02),自动驾驶群集智能理论与方法,2022-2024.
阅读() 最近更新:2021年12月01日 19:45:39
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}