首页 » 科学研究 » 交通流理论与深度仿真
道路交通系统是由人、车、路、环境和信息等多要素构成的复杂系统,具有随机、动态、关联、不确定等显著特征。实现复杂交通系统精准建模和可信仿真是本领域的基础科学难题。课题组长期致力于交通流理论和仿真研究,围绕瓶颈交通流理论、深度交通仿真方法、数据驱动交通流仿真、复杂交通系统仿真优化展开研究,打破垄断,研发了自主可控微观交通仿真系统TESS NG,开发了大规模城市中观交通仿真系统DynusT,在国内外大规模推广应用。近年来研究主要包括:(1)瓶颈早发性失效新现象和瓶颈失效识别理论,瓶颈振荡与稳定性内在耦合关系,智能网联环境下新型混合交通流理论;(2)复杂交互二维平面建模方法,混杂干扰行为建模方法,人-车-路-环境全要素仿真方法;(3)通用数据驱动仿真,关键危险场景可控仿真,考虑动态策略的三维仿真;(4)高可信仿真计算反求方法、Sim2Real系统设计仿真优化、系统运行协同仿真优化。
1. 瓶颈交通流理论
交通流在高速路汇入/汇出区、平面交叉口等由于车流交织、冲突易形成运行瓶颈,是导致道路拥堵的直接诱因。据统计,70%以上的拥堵是由于瓶颈通行能力制约导致交通流失效(即交通流由畅通变为拥堵)而形成。课题组长期深耕于瓶颈交通流理论研究领域,具体而言:
①针对道路设施瓶颈处多向干扰交通流失效识别问题,解构了瓶颈失效的时空关联关系,发现了瓶颈早发性失效新现象,从点-线-面三个维度建立了瓶颈失效识别理论,解决了复杂交通网络瓶颈源头识别难题。
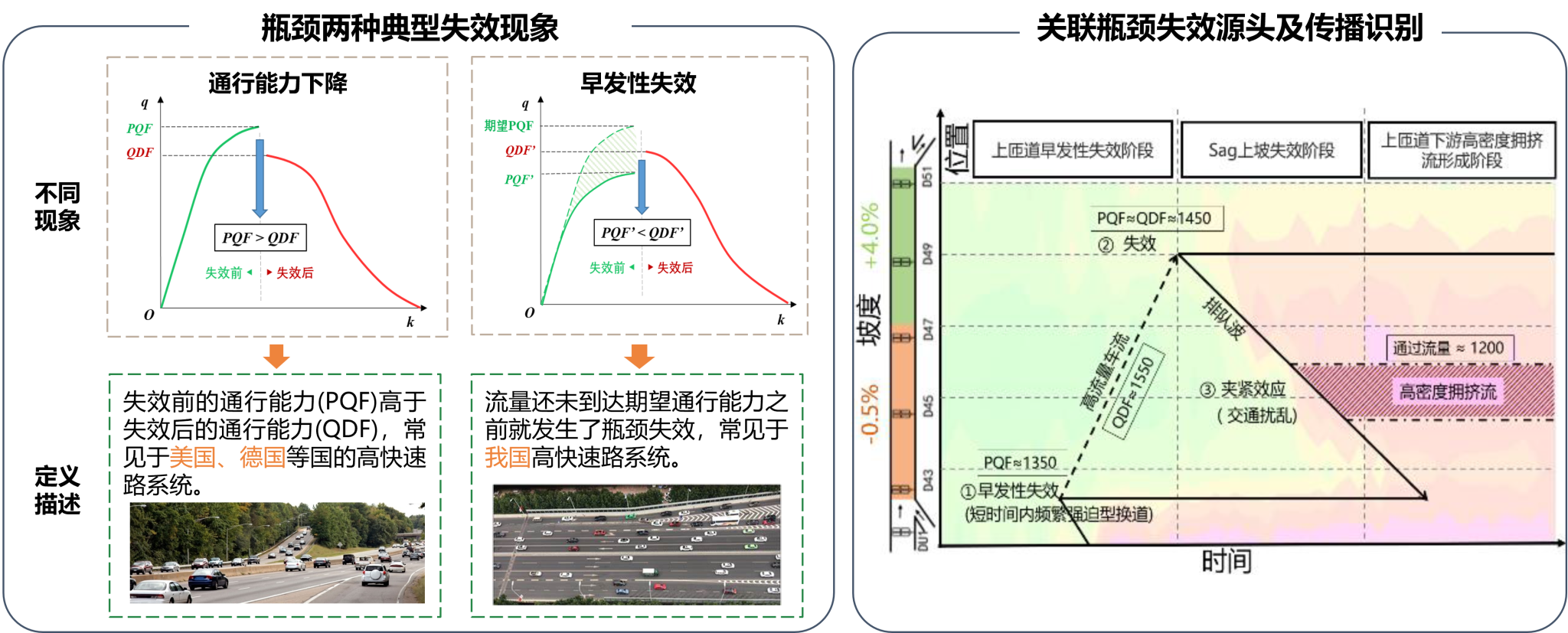
早发性失效现象和失效识别理论
②针对交通振荡与跟驰稳定性的因果关系,揭示了车辆稳定性在不同约束环境下的适用性和演变机理,建立了跟驰稳定性与交通振荡的内在理论耦合关系,定义了四类振荡并解析其致因。
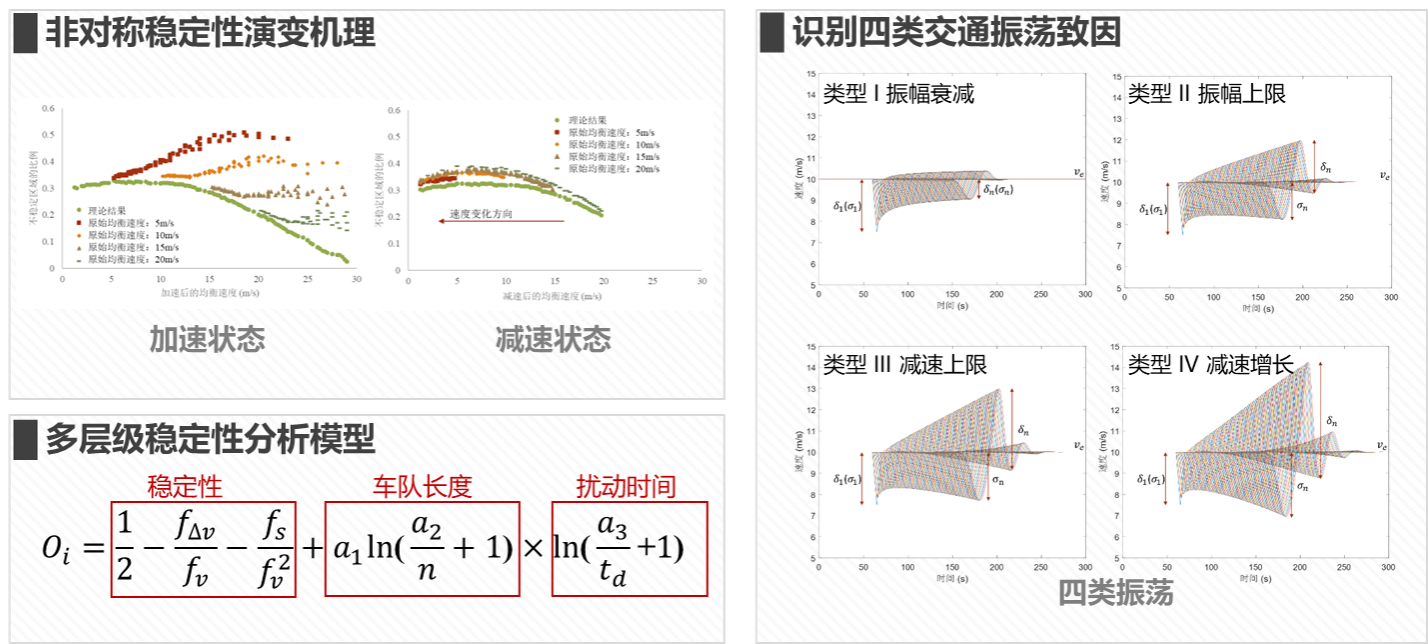
交通振荡和稳定性耦合关系
③针对智能网联环境下新型混合交通流运行规律结构性变化导致的瓶颈交通流研究新需求,系统研究不同等级智能网联车辆驾驶行为特征,解析人机混驾车辆交互行为机理,揭示自动驾驶车辆作为移动瓶颈的新型混合交通流瓶颈演化规律。
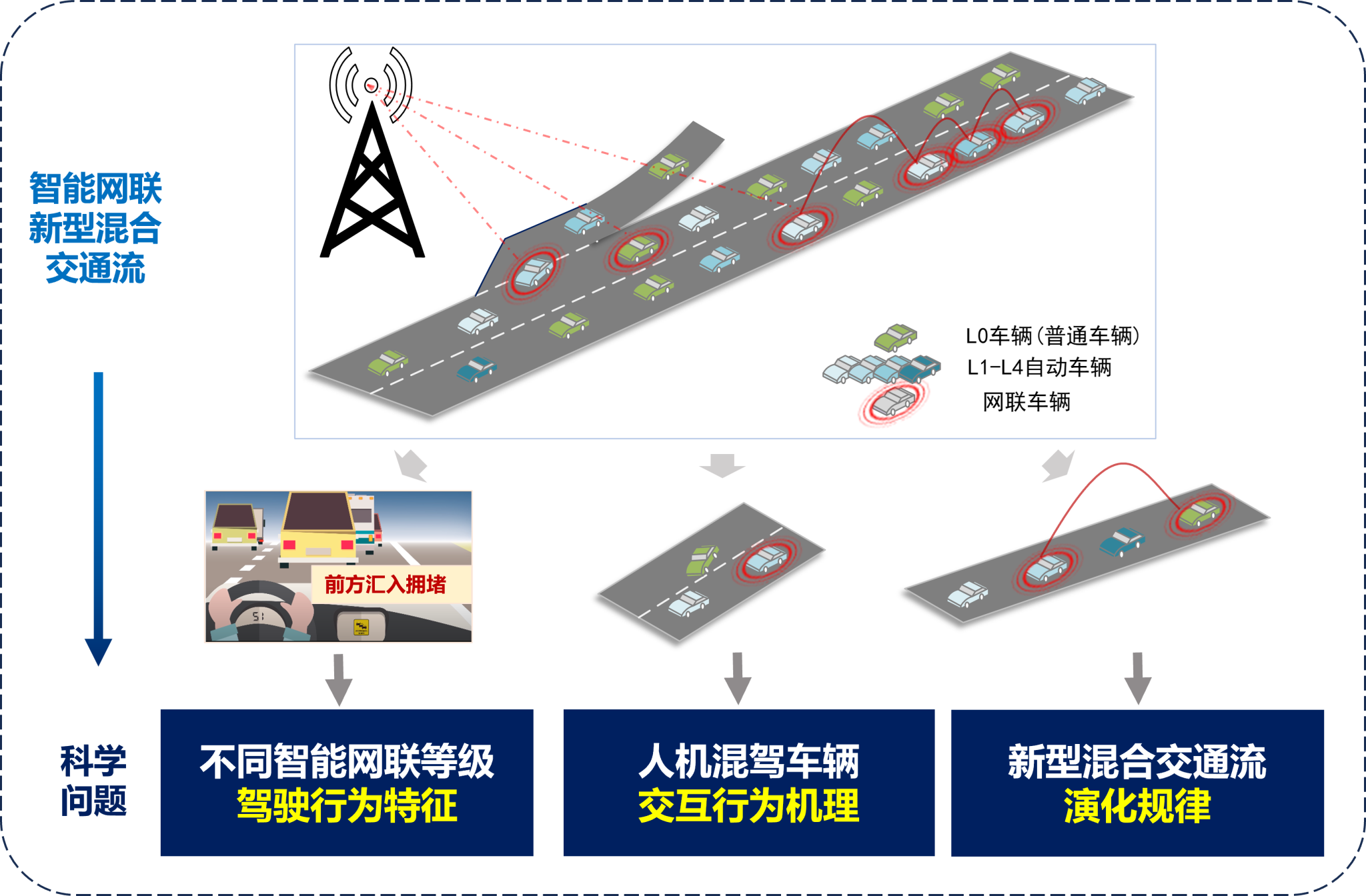
新型混合交通流研究方向
2. 深度交通仿真
传统交通仿真存在建模方法粗、建模要素缺、评价维度少等问题,难以满足混合交通流高精度模拟以及智能网联交通代际更新带来的新技术评价需求。课题组长期致力于驾驶行为精细化建模和深度仿真方法研究,大力提升交通仿真安全性评价能力,包括:
① 针对现有仿真以车道为单元的一维建模方法,研究混行场景多交互个体协同推演与微观行为建模,实现建模方法从一维(基于车道)到二维(基于平面)的突破,提升仿真粒度和精度10倍时空分辨率。
基于平面的二维仿真
② 针对现有仿真建模主要针对规则行为的不足,解析随机干扰行为机理,高精度再现混杂干扰交通流运行特征,从而满足交通系统安全、运行风险等评估需求,特别是可显著提升自动驾驶安全性虚拟测试的效率和效果。

混杂干扰行为建模仿真示例
③针对现有建模考虑车-路-环境要素为主,对驾驶人和信息要素考虑不足的问题,研究人-车-路-环境-信息全要素表征与形式化描述,实现建模要素从三要素为主到全要素的突破。
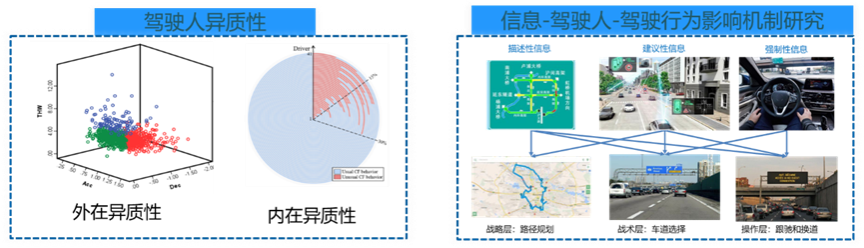
“人-车-路-环境-信息”全要素耦合仿真
3. 数据驱动交通流仿真
传统的仿真模型受限于数据采集和计算能力通常采用机理驱动模型来表征驾驶行为,对复杂多变的现实交通流模拟能力不足,无法满足瓶颈交通流精细化分析需求,更难以适应面向自动驾驶的多目标仿真评价需求。课题组近年来面向自动驾驶测试需求,聚焦数据驱动交通流仿真研究,包括:
①针对现有仿真模型难以应对现实交通中的高度异质混合交通流和复杂系统要素(道路拓扑关系、交通规则、信号控制)的问题,研究多源异构信息表征和特征挖掘方法,构建通用的数据驱动交通流仿真模型,实现复杂多场景高精度仿真。
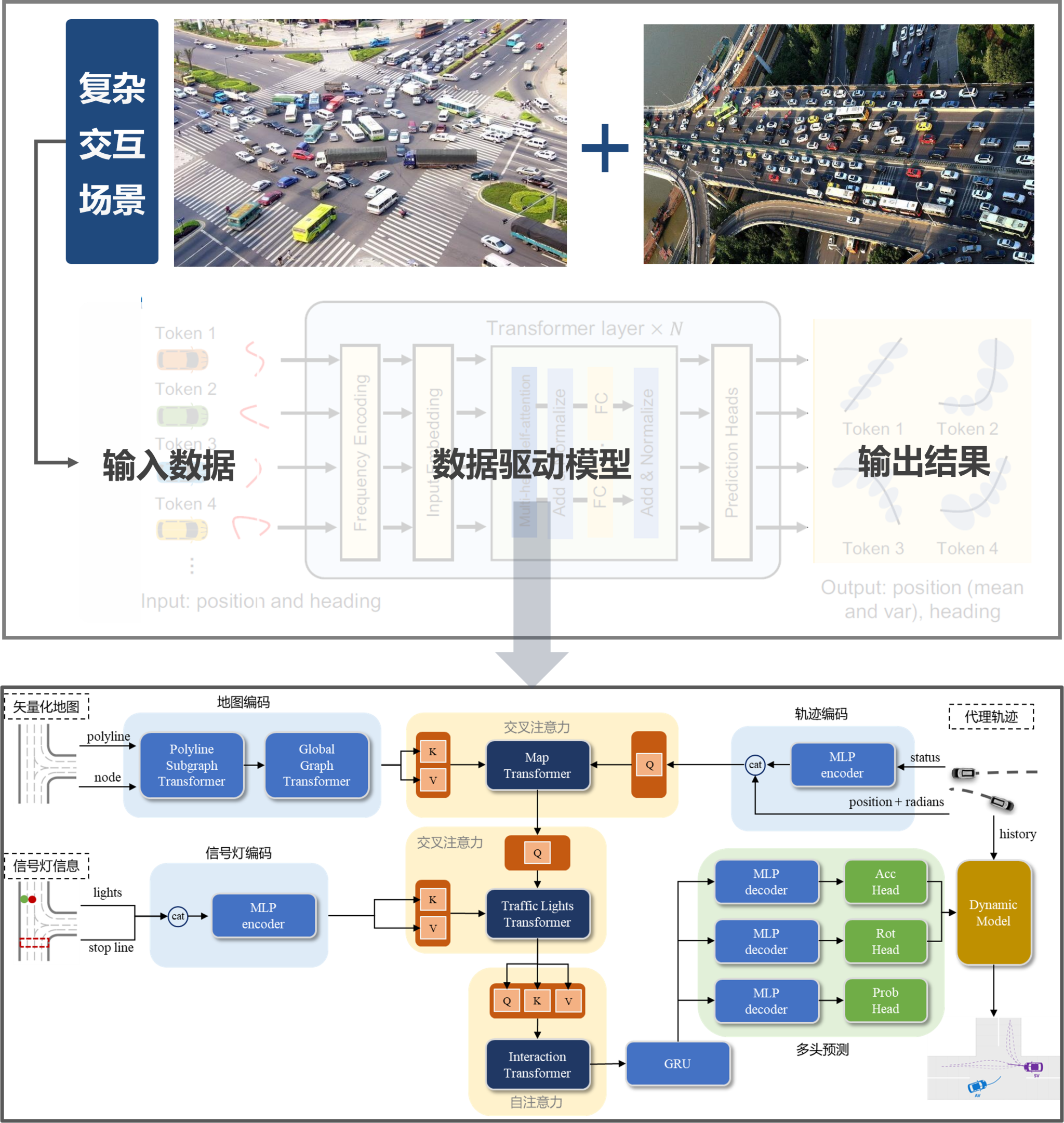
通用数据驱动交通流仿真
②针对实际交通数据中关键危险场景稀疏度高,难以再现高风险驾驶行为的问题,通过概率抽样和连续测试的策略,利用主动学习、强化学习等方法引导定向迭代,靶向生成关键危险场景,实现可控交通流仿真,为自动驾驶测试提供关键危险场景。
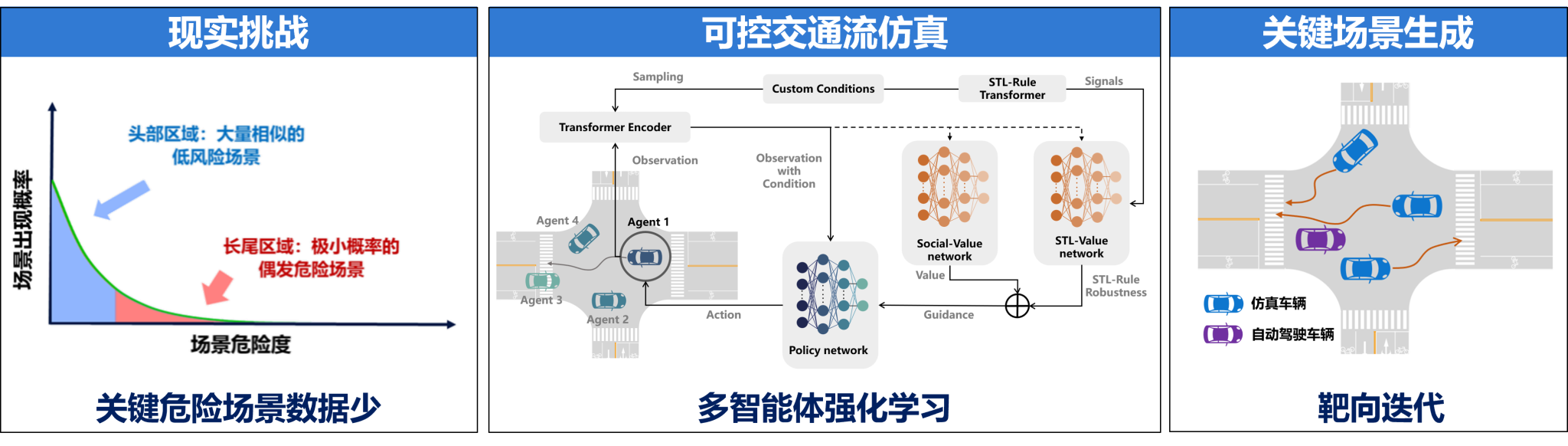
关键危险场景可控仿真
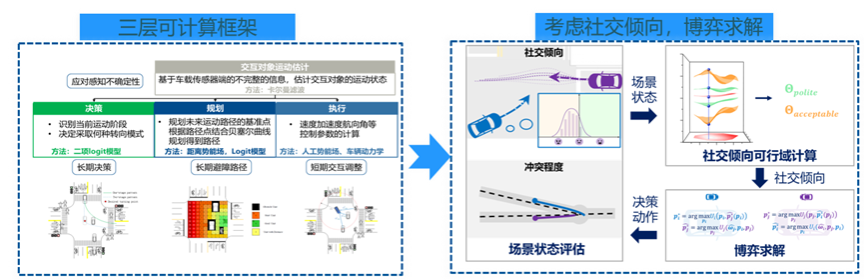
③针对传统以状态建模为主、轨迹相似性为目标的建模方法无法准确模拟复杂动态交互行为的问题,构建同时考虑二维平面运动和动态交互策略过程的策略仿真模型,准确刻画复杂交互场景下的动态交互过程,实现三维策略仿真,为自动驾驶社会性测试提供支撑。
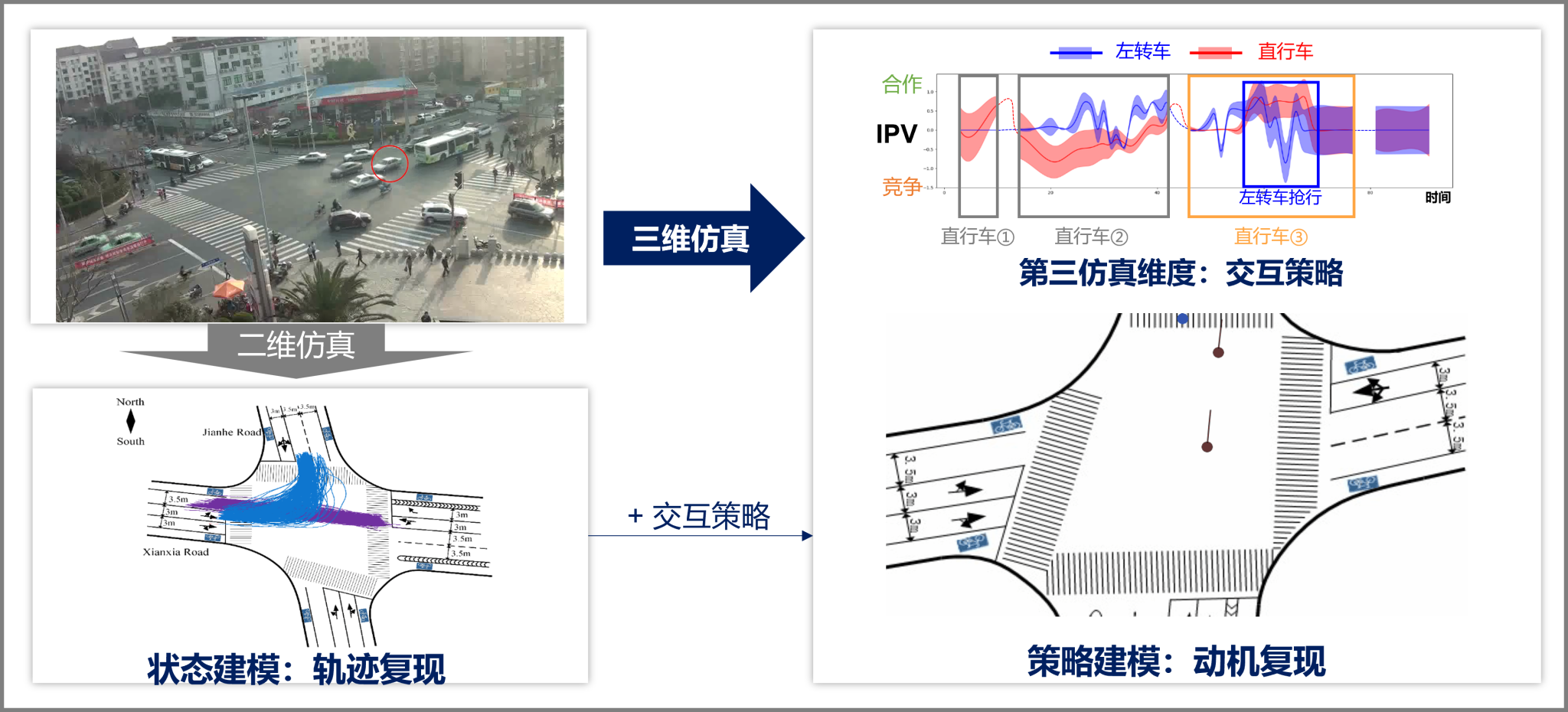
考虑交互策略的三维仿真
4. 复杂交通系统仿真优化
传统基于解析模型的优化方法由于采用大量简化假设而难以准确反映复杂、随机的交通系统演化规律,对交通系统的优化能力不足。基于仿真的优化方法能有效模拟复杂多样的交通场景,从而对交通系统的设计和运行进行快速优化。课题组近年来围绕复杂交通系统仿真优化问题,主要研究:
①针对仿真模型可变参量多、取值空间大、相关性强从而导致仿真反求计算效率低、场景适用性差的问题,研究面向系统优化的仿真计算反求方法,构建关键参量反向推导识别模型,提升仿真模型的反求计算效率和场景适应性。
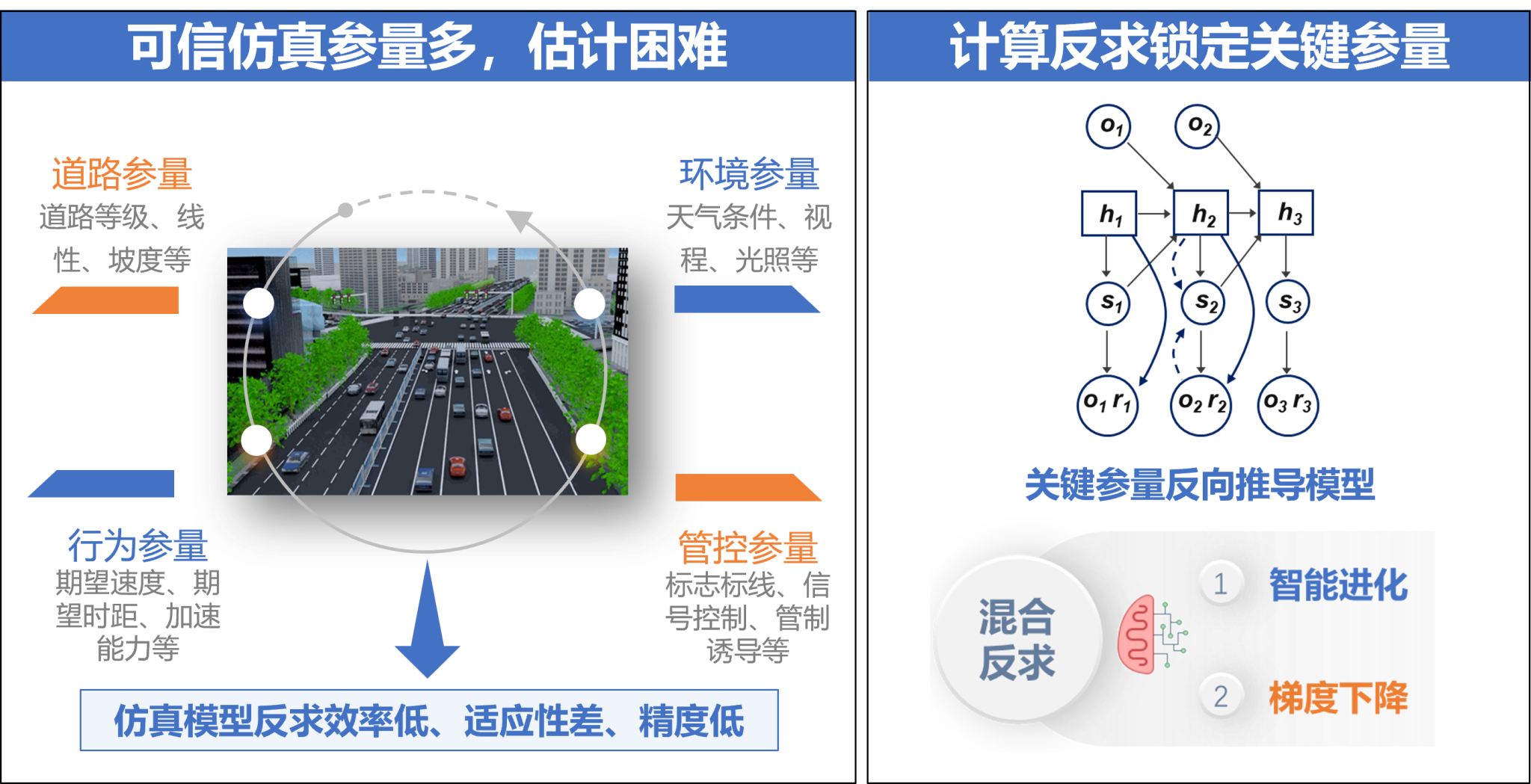
仿真计算反求
②针对交通系统设计如何有效应对运行场景的极端条件和不确定性难题,研究Sim2Real仿真优化方法,通过构建要素耦合的极端交通场景,研究基于仿真代理模型的鲁棒优化方法,实现交通系统设计对象在极端场景中的靶向优化。
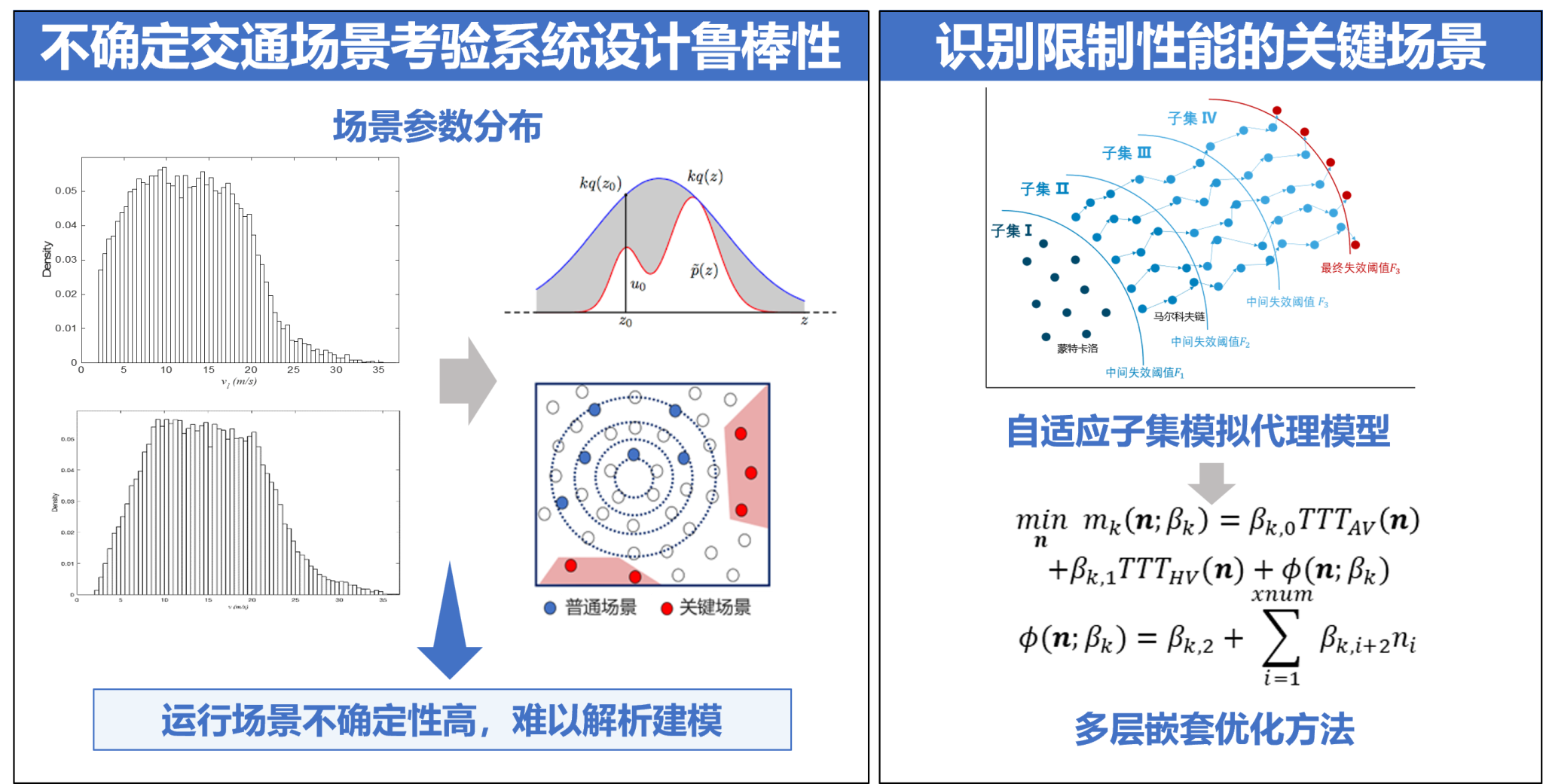
Sim2Real仿真设计优化
③针对传统交通运行管控策略离线优化、各类管控策略难以协同、仅支持方案评估等难题,依托实时在线交通仿真,研究基于元模型的分层快速仿真优化方法,实现交通流运行多目标自主协同优化。
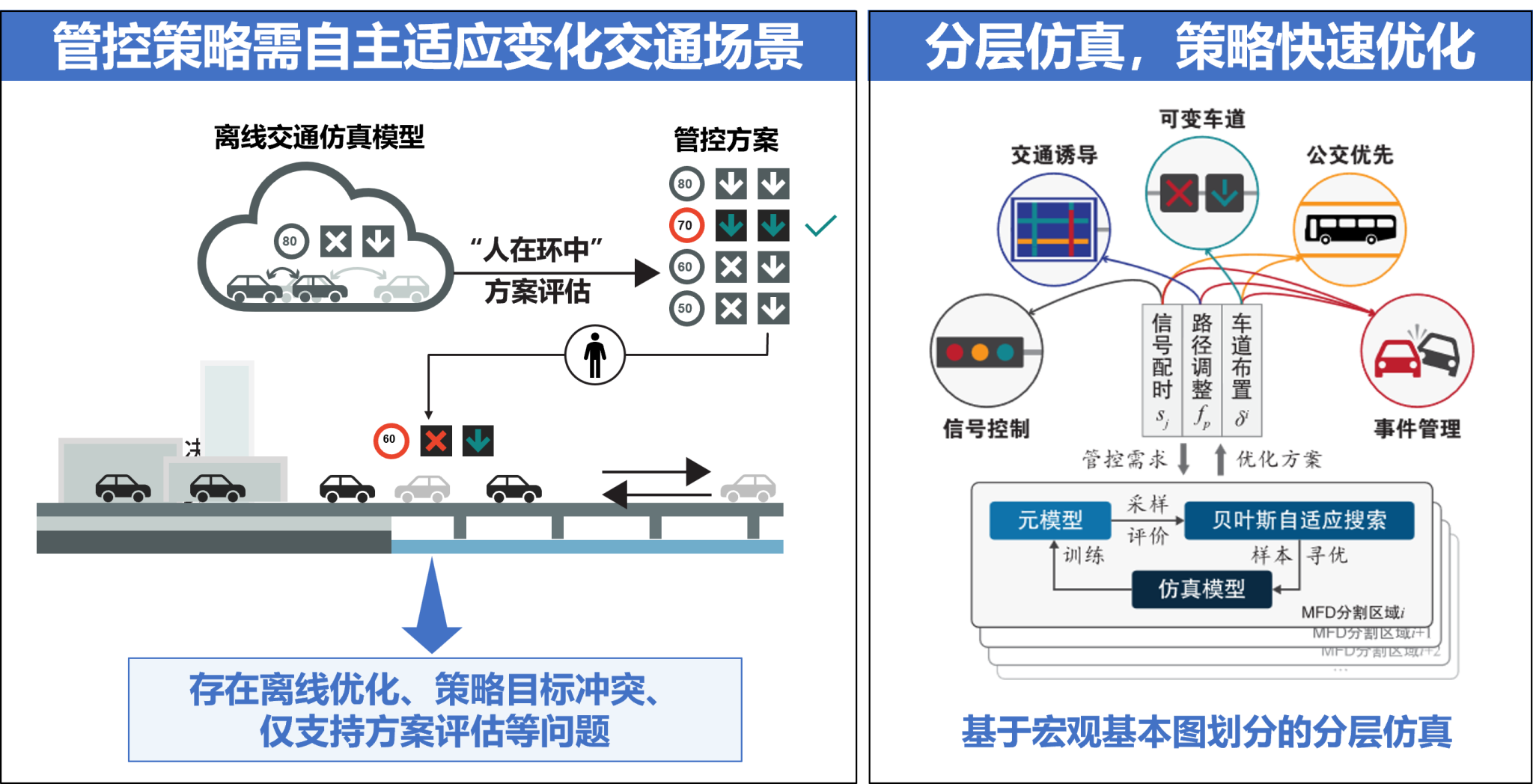
多目标协同运行优化
科研课题
国家重点研发计划课题(2019YFB16002):大规模交通网络混合交通流微观仿真技术,2019-2022.
国家重点研发计划课题(2018YFB1600505):车路协同一体化仿真与典型场景测试验证,2019-2022.
国家自然科学基金杰出青年基金(52125208):交通系统建模与优化,2022-2025.
国家自然科学基金(52402374):面向自动驾驶测试的数-模驱动高真实度动态交互交通流仿真,2025-2027.
国家自然科学基金(52072262):机非混行环境非机动车交互行为建模与深度仿真,2021-2024.
国家自然科学基金(52002278): 混合交通流干扰行为建模与仿真,2021-2023.
国家自然科学基金优秀青年基金(51422812):交通系统仿真与实验,2015-2017.
国家自然科学基金(51278362):城市快速路多瓶颈点阻塞判别及演化机理研究,2013-2016.
上海科委创新行动计划子课题(19DZ1208800):城市综合交通宏中微一体化仿真关键技术, 2019-2022.
上海市曙光计划(18SG21):智能网联汽车环境下交通流建模与仿真,2018-2021.
同济大学交通运输工程高峰学科基金,共享空间非机动车交通流建模与仿真,2016-2017.
上海市曙光计划(18SG21):智能网联汽车环境下交通流建模与仿真,2018-2021.
华为公司:熟练谨慎驾驶员风险行为建模与城市道路VRU精准建模,2024-2025.
广汽集团:数据驱动驾驶行为模型,2024-2025.
华为公司:驾驶人模型建模研究,2022-2023.
上汽集团:基于智能优化算法交通参与者模拟干扰方法研究,2019-2021.
腾讯公司:虚拟交通流模型集成研究,2019-2020.
华为公司:智能汽车交通流仿真与测试技术研究,2019-2020.
百度公司:智能汽车虚拟测试交通流仿真模型,2018-2019.
德国PTV公司:高可信度交通仿真关键技术研究,2016-2017.
阅读() 最近更新:2021年12月01日 19:45:39
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}