为了总结2024级硕士新生和博士新生在第一学年的研究工作,促进组内同门间的研究交流,加强老师对学生工作的指导与管理,2025年7月29日下午13:00,同济大学交通学院TOPS课题组在通达馆A102就第一学年新生研究工作总结举行了交流会。与会成员有TOPS课题组全体老师以及2024级、2025级硕博学生。

学年总结会顺利召开
2024级硕博学生依次汇报,内容如下:
郭慧洁与大家分享了《自动驾驶算法的交通协调性增强》的研究内容,提出交通协调性的评价方法以及具体的定义,将交通协调性模块纳入自动驾驶算法中,保证自身能力不受损的情况下提升交通协调能力。随后对年度的工作和研究做了整体总结,介绍了在Onsite比赛以及组内工位和住宿安排的工作。
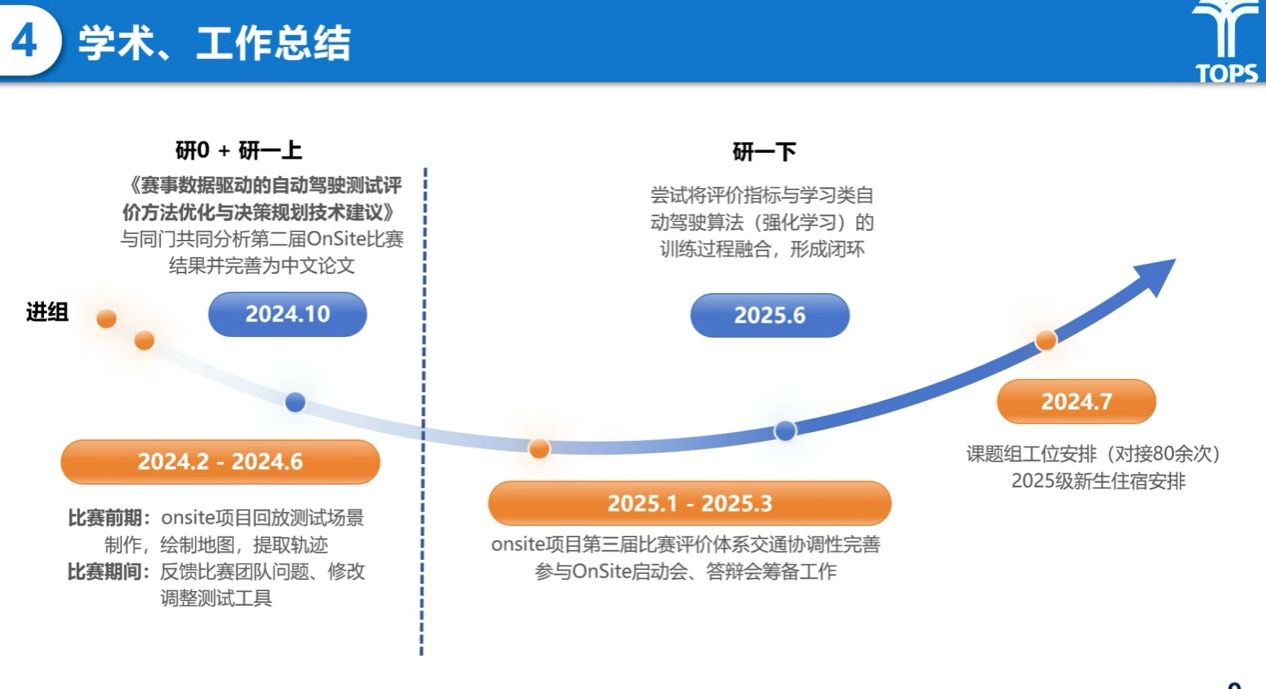 郭慧洁研究工作总结
郭慧洁研究工作总结
郭翼成首先对过去一年的工作和研究进行了总结。在Onsite学习中心建设过程中,主要负责在决策模块示例模型和模型在线化部署,以及配合平台课程建设等工作。之后分享了《基于先验意图共享的CAV协同决策方法》和《可调对抗强度的智能自动驾驶汽车交互式对抗测试》,希望下一步能够构建一个智能交互式测试框架,支撑决策算法加速训练,赋能虚实融合训练测试平台。
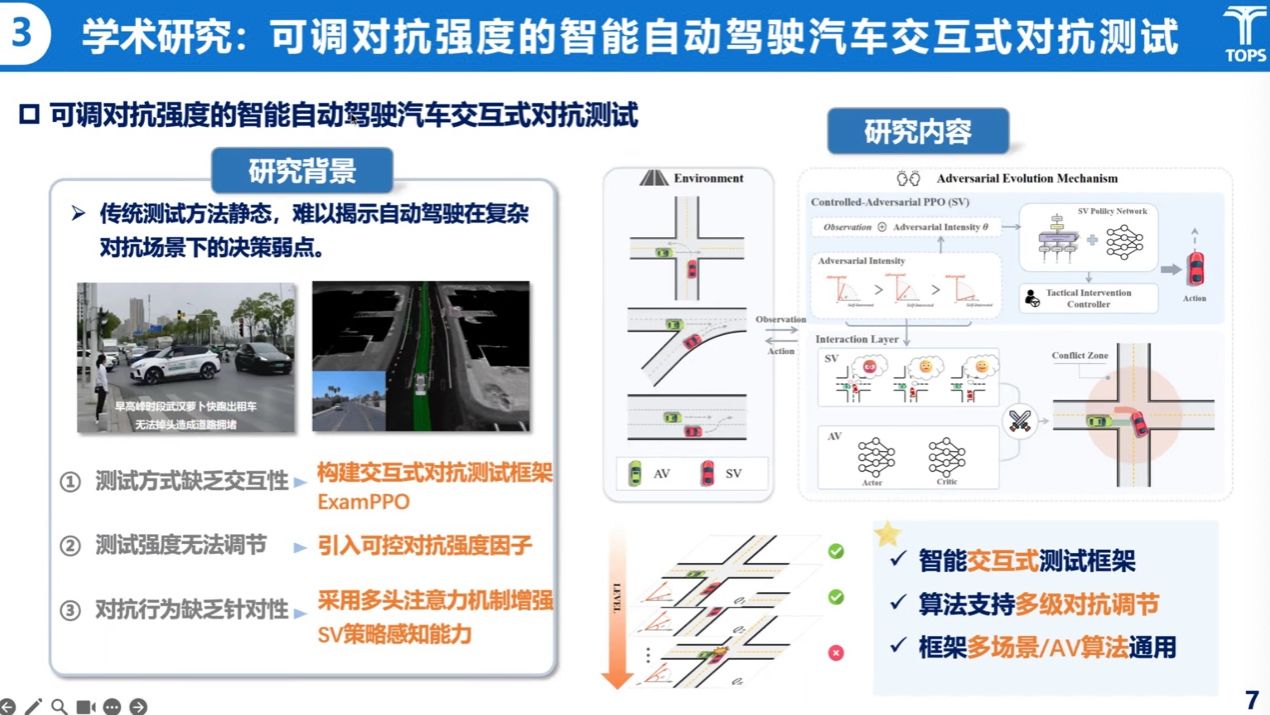
郭翼成研究工作展示
黄烨鑫分享了他在AR-HUB紧急接管风险提示算法设计上的研究。AR_HUD在驾驶风险提示上具备巨大潜力,符合非预期紧急接管中的提示需要。研究希望解决复杂动态风险场景中提示内容与风险感知重点的重合度低的问题,并针对驾驶员自主感知能力进行提示需求匹配。
冯华越首先分享了《从人人交互到人机交互的场景迁移生成》的研究工作,主要思路为使用大量人人交互场景进行预训练,并使用少量人机交互场景进行微调,通过场景知识迁移提升人机交互场景下模型训练效果。之后分享了自己在Onsite项目中,对Onsite场景构建、城中村数据赛季以及赛道试卷和代码维护的相关工作。
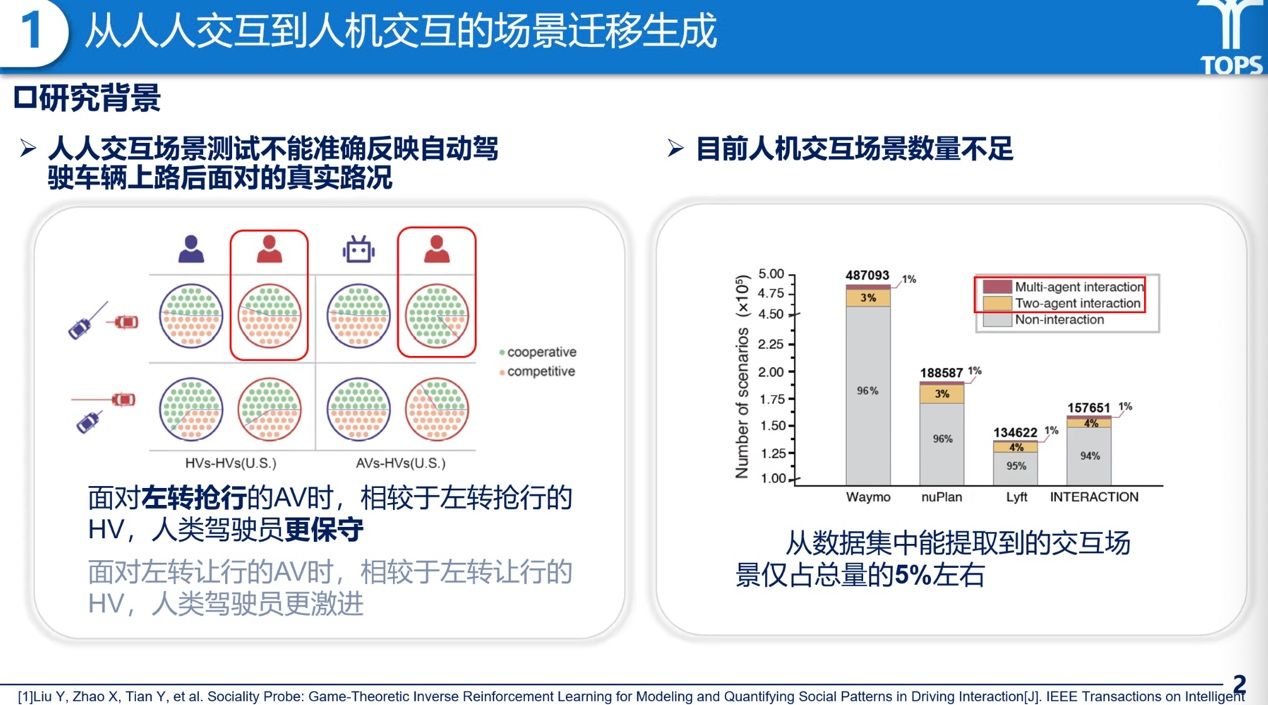
冯华越研究工作展示
蒋溪彦首先分享了她在《面向自动驾驶完备安全的交互场景生成》中的研究工作,围绕交互场景生成的可控性、完备性与真实性展开了系统性的改进与探索。另一项研究《面向人机交互系统优化的可计算认知行为建模》聚焦于长期存在的人机共驾场景及其交互优化空间,针对人类驾驶员的认知局限,构建了可计算的认知行为模型,用以模拟人机交互中的驾驶行为,从而实现高效、可控的交互测试。
李思营分享了他在机非交互危险场景识别方面的研究工作。该研究通过“时空特征提取—时间序列建模—危险得分预测”的流程,对道路风险进行系统建模与评估,在三维场景生成与闭环仿真相关工作中,采用3D高斯建模与分部渲染等技术,实现了面向仿真环境的高保真、可控场景生成。目前,其研究正聚焦于多车辆背景布置在仿真环境中的有效实现。
连邦安研究工作展示
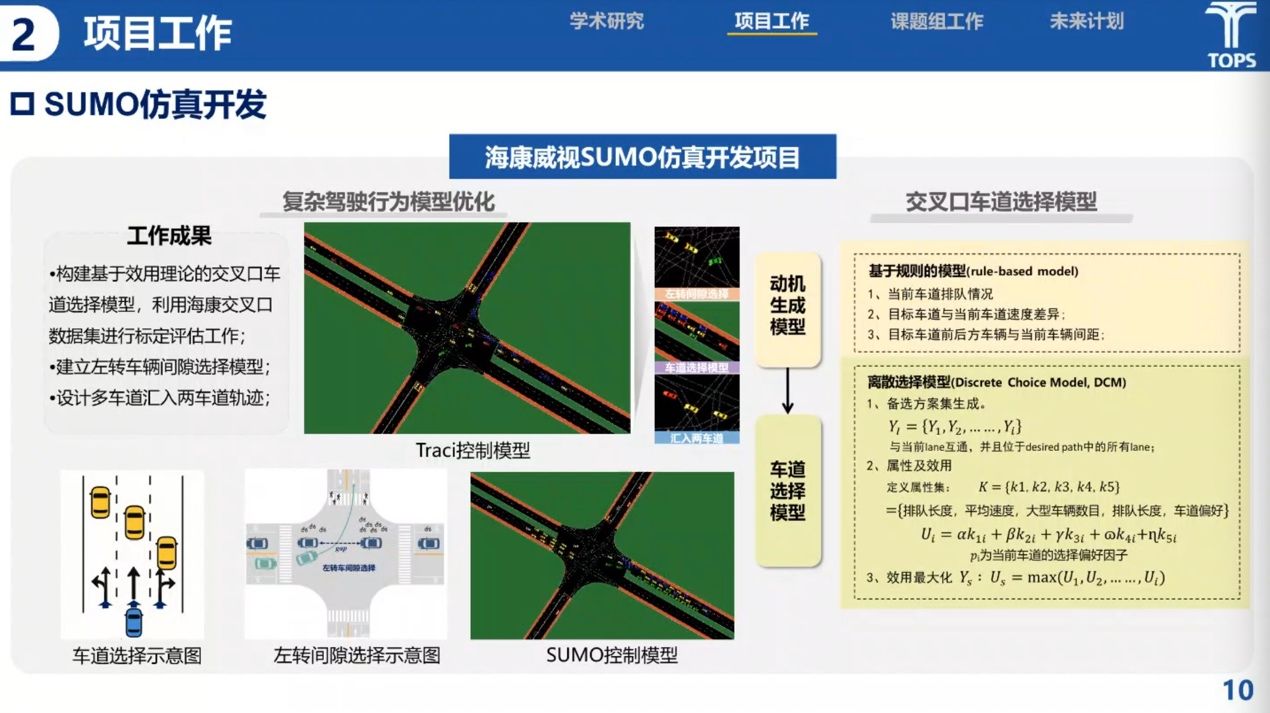
连邦安首先分享了《拟人化AV驾驶决策建模》的研究工作。研究聚焦于左转机动车与多类型交通参与者之间的动态交互策略,通过构建链式决策机制,优化左转车辆在抢行与让行之间的决策表现。在项目和组内工作方面,他分享了自己参与海康威视SUMO仿真开发项目的工作经历;同时负责设备组的申报与资产管理工作。未来,他将进一步拓展决策建模在多场景下的应用,持续优化决策框架,并提升模型的可解释性。
刘埮首先介绍了自己参与的项目工作及组内工作,包括华为车路协同感知项目中的数据采集与项目书撰写任务,以及组内财务报销等日常管理工作。随后,他分享了研究《面向机场地勤服务的多类型自动化电车调度优化》。该研究构建了面向多类型地勤服务车辆的充电调度优化模型,并提出了分层优化求解算法来有效提升调度效率与求解性能。
潘昱蓉首先总结了本学年个人的整体工作进展,随后重点介绍了《就驾驶员意图识别的人机共驾策略优化》的研究内容,主要聚焦于交互式运动规划方法的优化与提升。在项目和组内工作方面,她分享了自己在海康威视SUMO平台的二次开发以及新算法的集成工作;以及作为组会与活动组组长,组织多项集体活动的工作经历,丰富了课题组的文化生活。
孙博雅分享了其在外部人机交互(eHMI)方向的研究工作,围绕基于意图识别的外部人机界面设计,以及基于CAVE平台的IR-eHMI算法实现与实验评估展开。在相关研究中,她实现了面向行人的个性化提示机制,揭示了行人异质性对eHMI有效性的显著影响。
孙宇航首先分享了《考虑人类信任的自适应自动驾驶风格》研究,聚焦于避免出现驾驶员对于系统的过信任状态的危险情况。然后分享了《基于偏好强化学习的自动驾驶动态接管请求策略》,从华为项目引出,对驾驶员异质性对群体模型失效问题的影响进行了深入介绍。
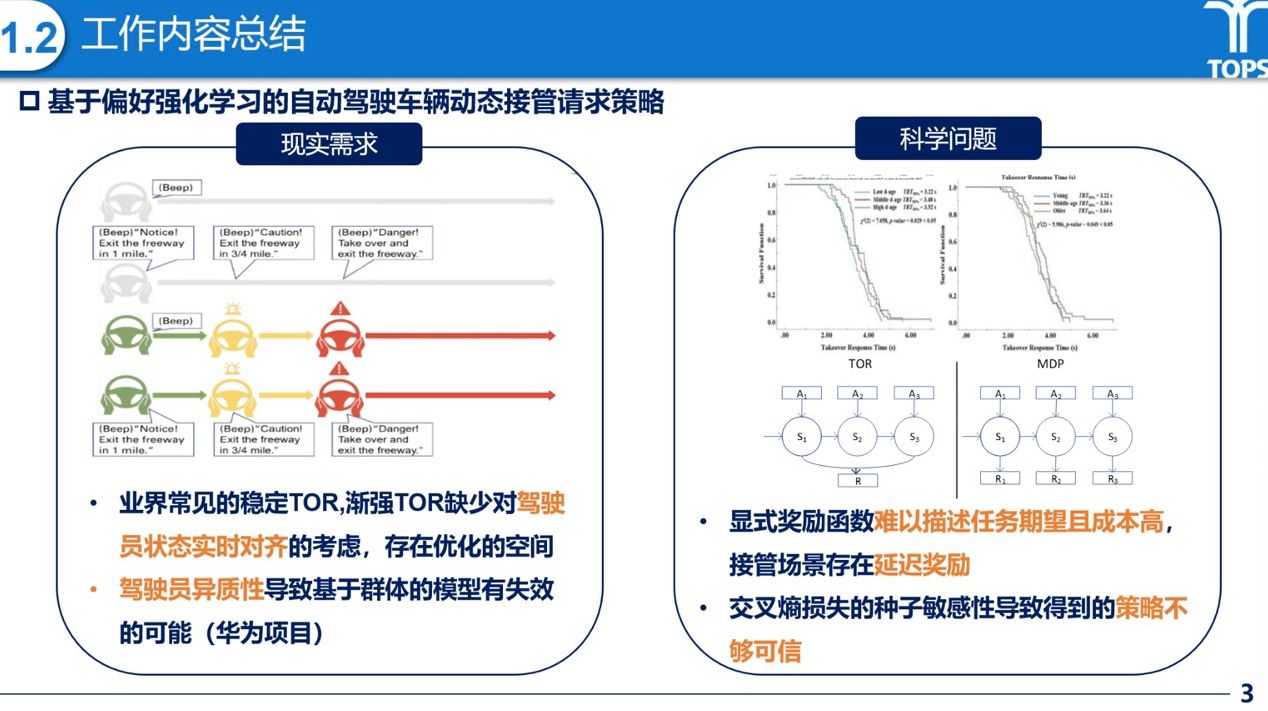
孙宇航研究工作展示
王洁首先介绍了她在华为项目的工作,主要负责三阶段接管时间预测模型的构建、耦合驾驶员认知提示策略模型的开发,以及接管相关数据集的整理与建立。随后,她分享了基于驾驶员认知模型的QNMHP三阶段接管反应优化策略的设计思路,并探讨了自动驾驶接管失效链路的分析研究。在此基础上,还在实车虚实融合测试平台及整车台架环境中开展了验证实验,验证了相关策略的可行性与有效性。
修晓煊主要分享了自己在跨域场景迁移生成方面的研究工作,聚焦于国内外道路静态几何结构、交通法规以及驾驶策略存在差异的背景下,如何实现高效的场景生成算法迁移学习;之后介绍了基于Social-MARL方法的目标域场景定向引导生成的相关研究。最后她介绍了自己在四川蜀道项目,所承担的多源数据融合与系统运行状态辨识模型的构建等关键任务。
严周栋首先分享了自己一年来的项目和研究工作之间的联系,包括科技部重点研发项目、支持Onsite建设等。从项目中开展了一些研究包括,针对模态多样性可控的轨迹预测和模型数据联合的动作提取与轨迹降噪重构工作。随后介绍了支持华为紧急控车项目;设计Onsite实车赛demo算法,调通实车和域控在环的调试流程等工作。最后对未来的研究进行了展望。
阳友康主要分享了他在人机混驾交通流建模方面的研究工作,从跟驰模型出发,构建了面向人机混合驾驶环境的仿真模型,并基于真实交通数据集对模型进行了标定,实现了从微观行为建模到宏观交通特征刻画的尺度转换。在此基础上,他进一步分析了混合交通流的演化特征,并利用SUMO平台开展了仿真实验,探讨自动驾驶技术对宏观交通流的影响机制。
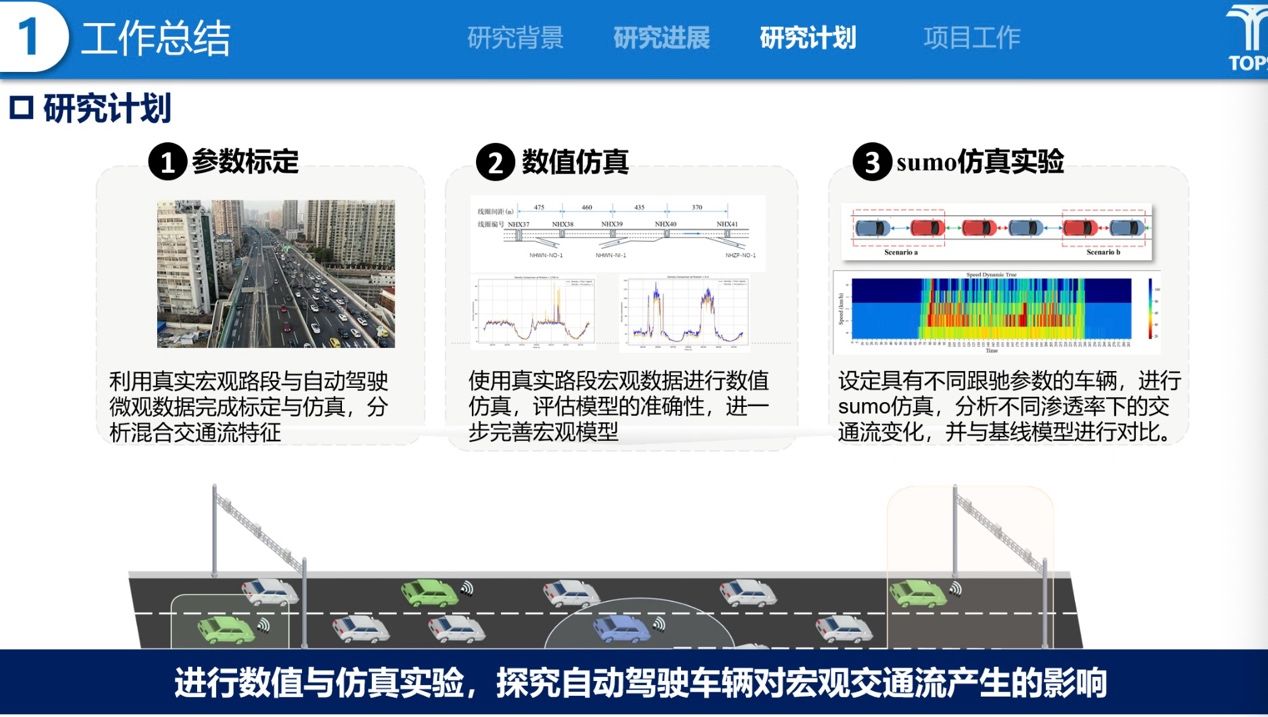
阳友康研究工作展示
赵宇家首先分享了自己面向自动驾驶测试的AV与群体骑行者的动态交互场景生成的工作,以及基于华为项目的,面向自动驾驶测试的城市交通VRU行为建模仿真与高风险场景库生成,并接入了Onsite平台测试,实现了高风险参数挖掘与反馈。
赵梓皓首先分享了其在《面向自动驾驶测试的可控背景交通生成》方面的研究工作,重点针对测试过程中背景车辆对自动驾驶车辆意图产生误判的典型场景进行建模与生成。该模型能够合成符合逻辑的误判情形,用于测试系统的鲁棒性。随后,他介绍了近期眼动注意力识别相关的提示算法研究,主要关注冗余人机界面(HMI)提示对驾驶员注意力分配与驾驶分心行为的干扰问题,后续将通过实证实验进一步验证冗余提示对驾驶员驾驶体验和风险感知的影响。

周昕Onsite项目工作总结
周昕首先分享了自己在汽车安全沙盒监管的相关研究工作,重点关注如何在确保自动驾驶汽车数据充分回传的同时保障用户隐私安全,以及回传监管数据质量参差不齐所导致的事故责任难以追溯、事故重建困难的关键问题。随后,他介绍了他在Onsite比赛全过程中的支持工作,以及在Onsite平台建设与完善过程中所承担的具体任务和工作经验。
每位同学汇报结束后,孙剑老师都进行了细致的点评和建议。孙老师首先对同学们过去的付出和研究工作表示肯定,之后对同学们各自研究的工作落实情况和下一步工作给出了建议。同时孙剑老师强调,要加强Onsite平台的战略规划工作,对各细分板块做好工作规划,并统筹人员分配与工作支持情况,将OnSite平台管理地更好。
至此,本次硕博新生学年工作汇报会圆满结束。期望每一位加入TOPS的新成员都能不懈追求卓越,并祝愿大家在未来的学习旅程中收获丰富,取得辉煌成就。让我们在接下来的日子里,一起凝神聚力,快乐科研,让优秀成为习惯,与TOPS共同进步!
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}