2025年6月19日,TOPS第164期组会于通达馆A102线下举行。本次组会由22级博士朱奕昕和23级博士张国宇分别汇报《考虑驾驶人分阶段反应时的可计算认知模型》和《基于自适应调整的路侧多模态感知增强研究》的相关内容。课题组全体老师同学出席了本次组会。

汇报时刻
朱奕昕同学从研究背景、研究内容、研究结果和总结展望四个方面展开介绍。
在研究背景方面,朱奕昕指出L2-L3级自动驾驶事故多源于驾驶员接管不及时,提出基于体态恢复、感知恢复、认知恢复三阶段反应时间的认知建模是优化人机交互的关键切入点。
研究内容
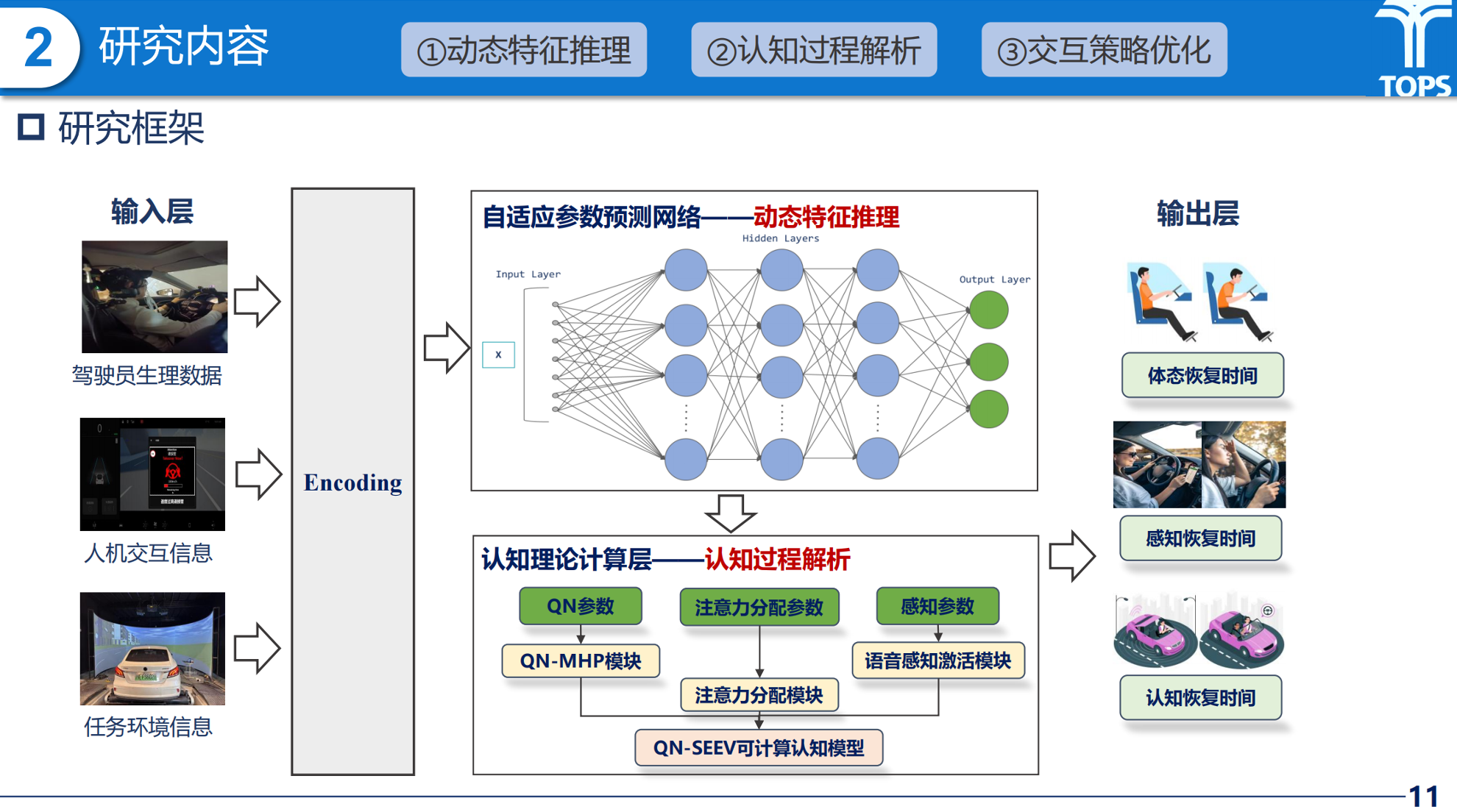
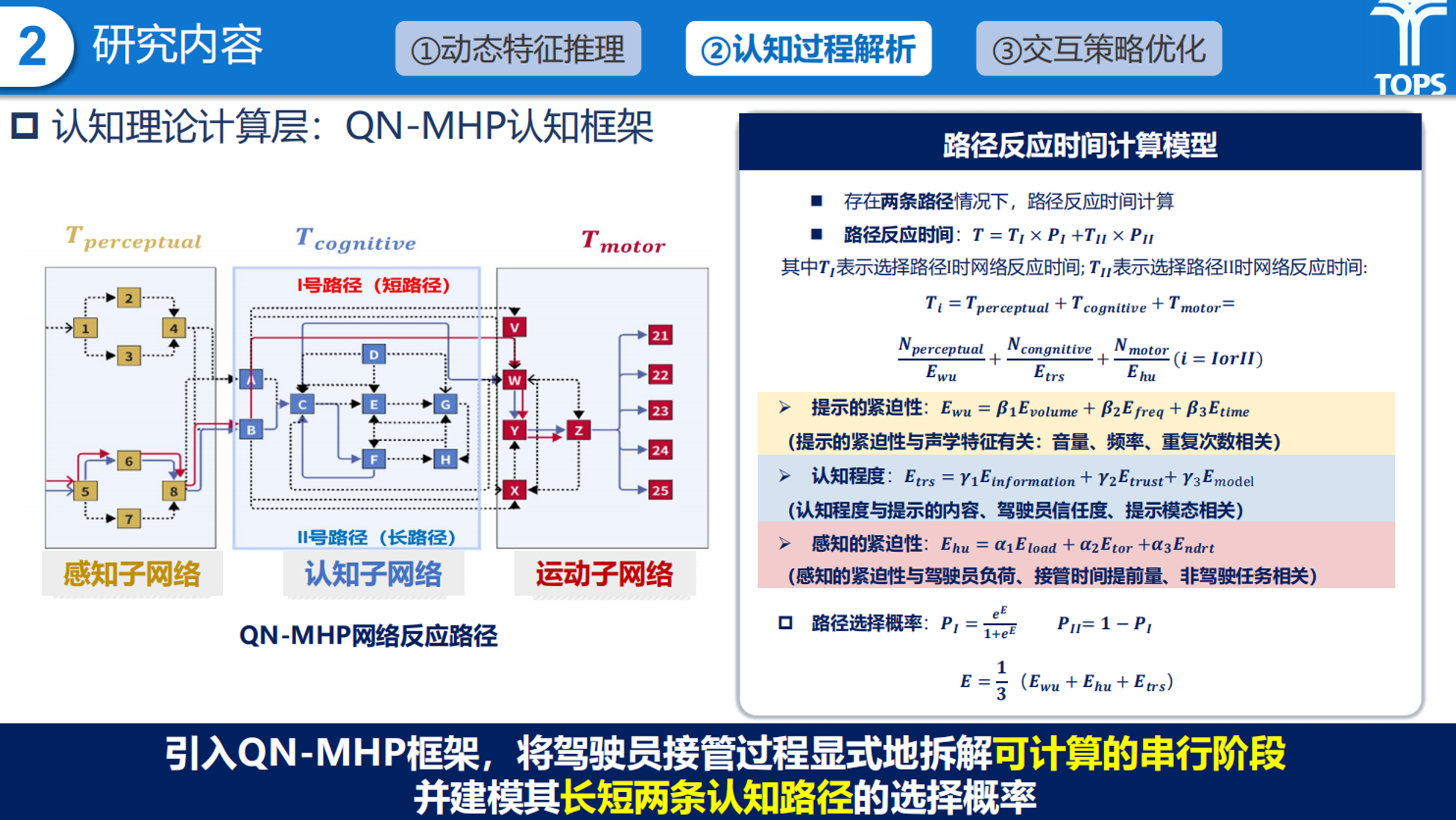
在认知过程解析方面,基于QN-MHP框架,嵌入可计算认知理论模型,将驾驶员的接管反应过程拆解为可计算的认知路径,并结合SEEV模型量化视觉注意力分配,应用Steven’s幂律分析听觉警告感知特性,最终实现对体态、感知和认知恢复三阶段反应时间的可解释性度量。
研究内容
在交互策略优化环节,建立了“认知-行为”闭环优化机制。依据模型预测的三阶段反应时间及认知参数,生成个性化的HMI提示策略。

研究内容
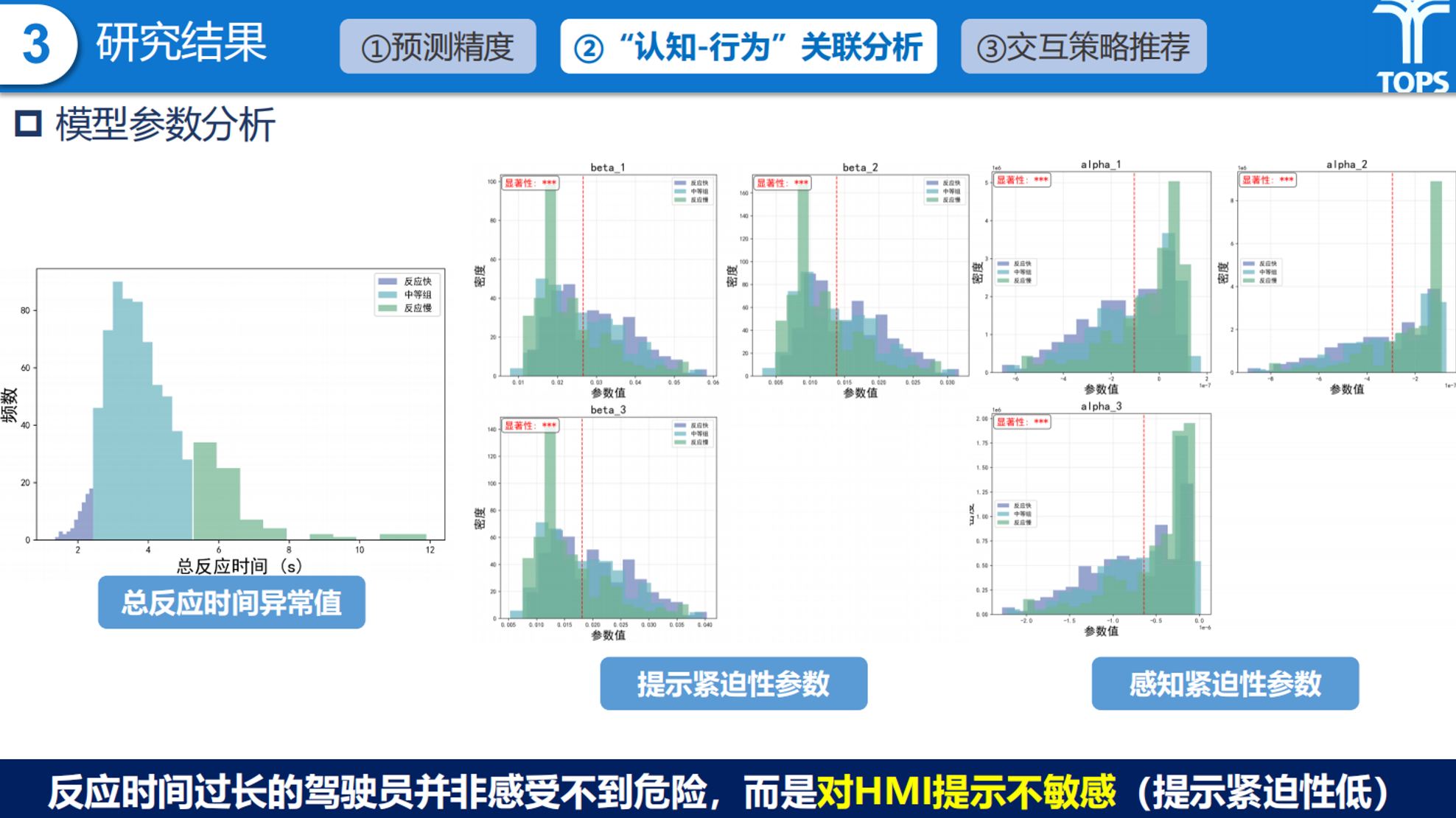
在研究结果上,模型对体态和认知恢复时间的预测精度优于纯数据驱动方法,且能通过认知参数分析揭示“反应慢”的成因(如HMI提示不敏感),据此推荐多模态警报等个性化HMI策略。
研究内容
总结展望中,朱奕昕提出将向在线自适应监测和闭环干预方向拓展研究。
同学们对朱奕昕同学的研究针对反应时间真值、具体模型架构与人机交互信息等方面进行了讨论。孙剑老师提出人机交互信息前置可能导致因果逻辑问题,并强调需完善模型干预机制与训练真值验证;石皓天老师建议补充消融实验以验证模块有效性。田野老师指出实际场景中三阶段可能存在叠加现象,但肯定其分阶段提示的交互价值。

汇报时刻
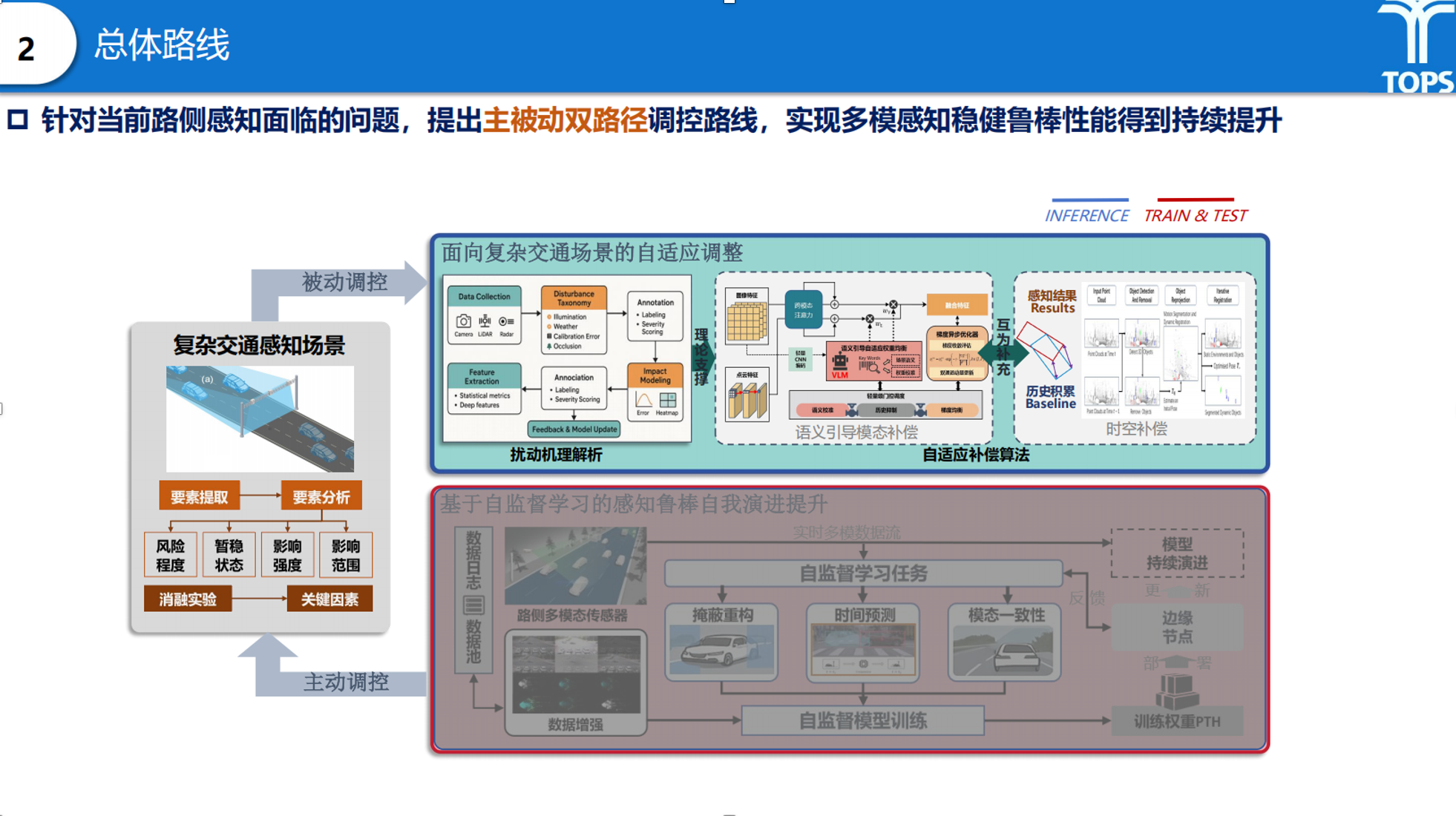
接着,张国宇同学围绕研究背景、技术路线和实验验证等三个方面对他的研究《基于自适应调整的路侧多模态感知增强研究》展开介绍。
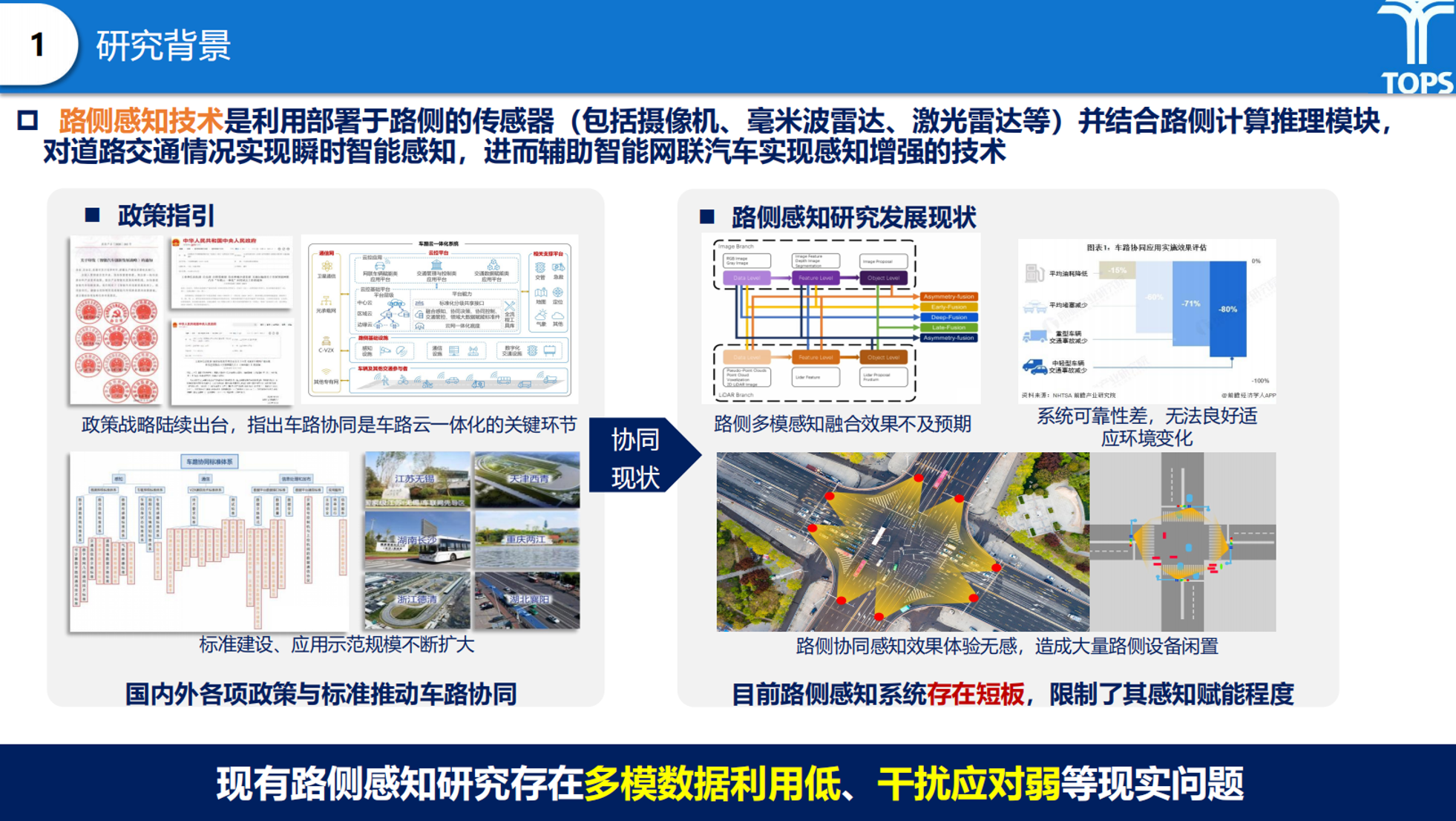
在研究背景部分,张国宇指出复杂交通场景下单车智能感知能力不足(如感知盲区、超视距感知缺失),现有路侧多模态感知系统存在多模数据利用率低、环境适应性弱、协同泛化性差三大短板。
研究内容
在研究内容上,提出主被动双路径调控方案。在被动调控方面,构建了覆盖数据筛选(质量评估)、特征提取(动态模型选择)、融合决策(语义引导权重均衡) 的全流程自适应优化框架,以实时提升感知精度与效率。
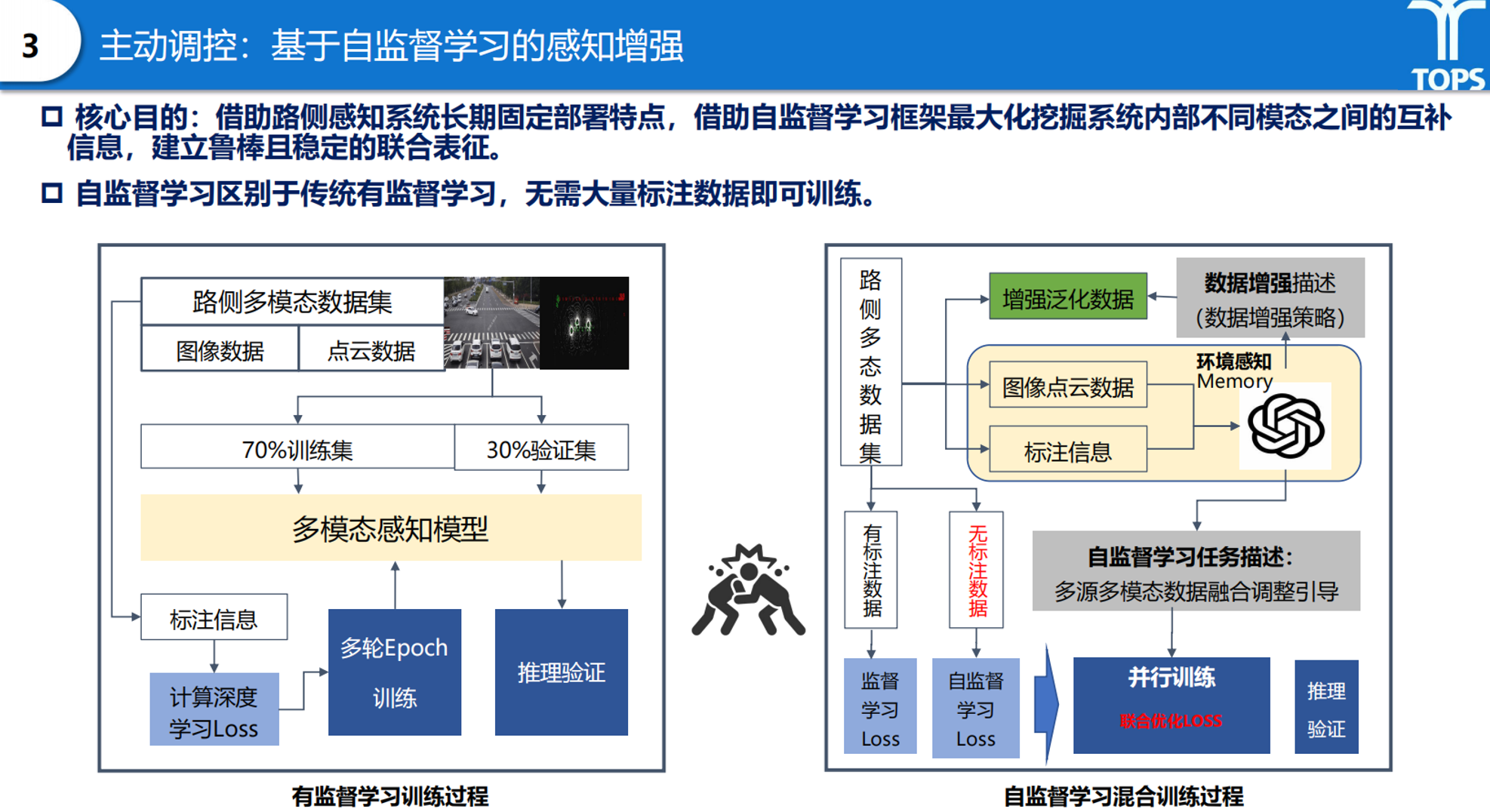
在主动调控方面,设计了基于自监督学习的框架,利用路侧设备长期采集的无标注数据挖掘模态间互补信息,构建鲁棒表征并减少对标注数据的依赖,实现系统感知能力的持续演进。
研究内容
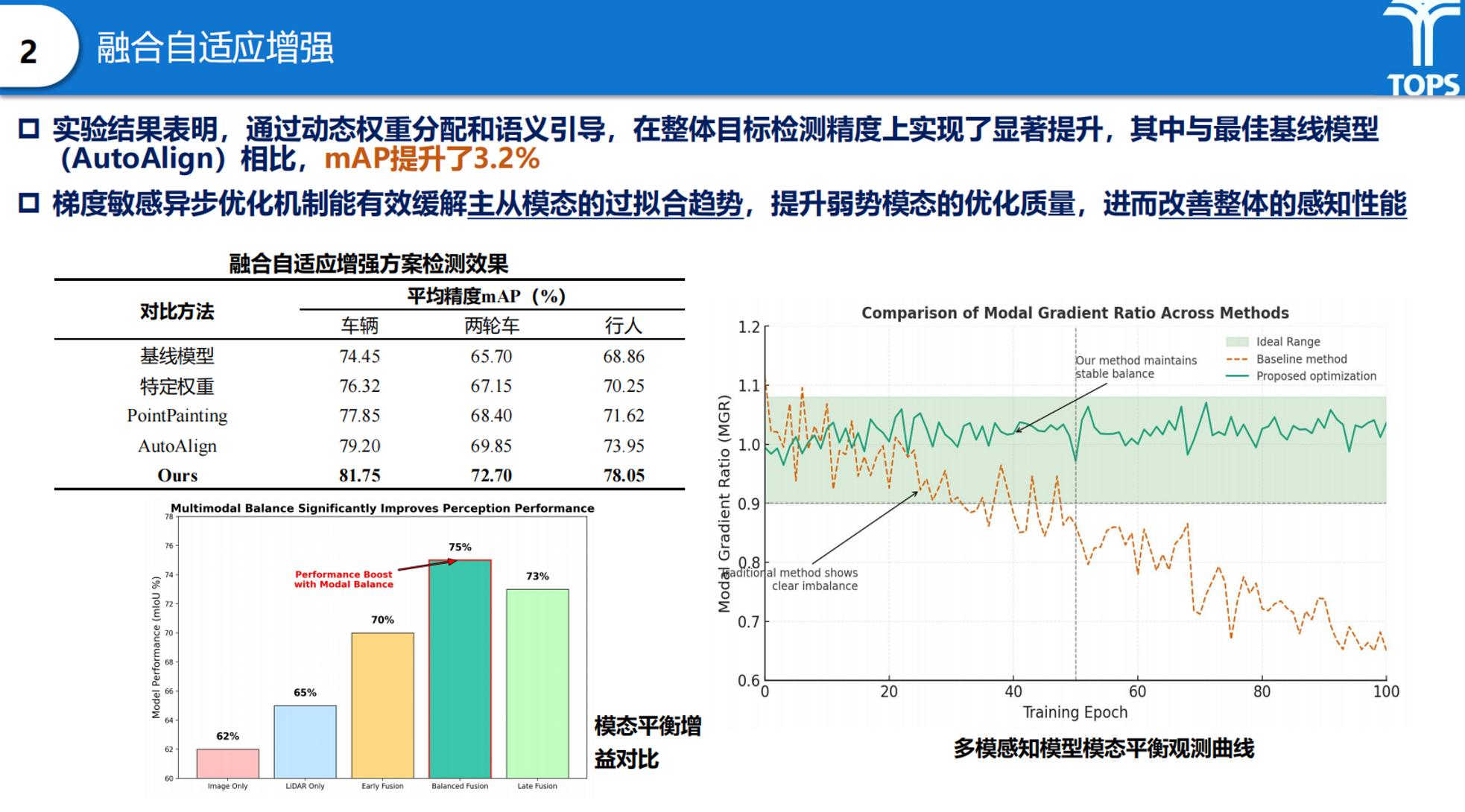
研究结果表明,通过动态权重分配和语义引导,在整体目标检测精度上实现了显著提升,其中与最佳基线模型相比,mAP提升了3.2%。
研究内容
下一步将重点开发基于自监督学习的感知增强方法,利用路侧系统长期部署优势,通过设计模态一致性等自监督任务,结合真实场景数据与开源增强数据,构建混合监督-自监督训练框架,实现无需大量标注的多模态表征学习,持续提升感知模型的泛化能力和适应性。
研究内容
老师和同学们针对张国宇同学的研究,在模型结构、模型权重、数据处理和风险场景识别等方面的问题进行了讨论。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}