2023年11月16日下午16:30,TOPS第134期组会于通达馆A102会议室线下举行。本次组会由2020级博士魏书樵与大家交流讨论《数据驱动的路段非机动车行为仿真》的相关内容。课题组老师同学出席了本次组会。

汇报时刻
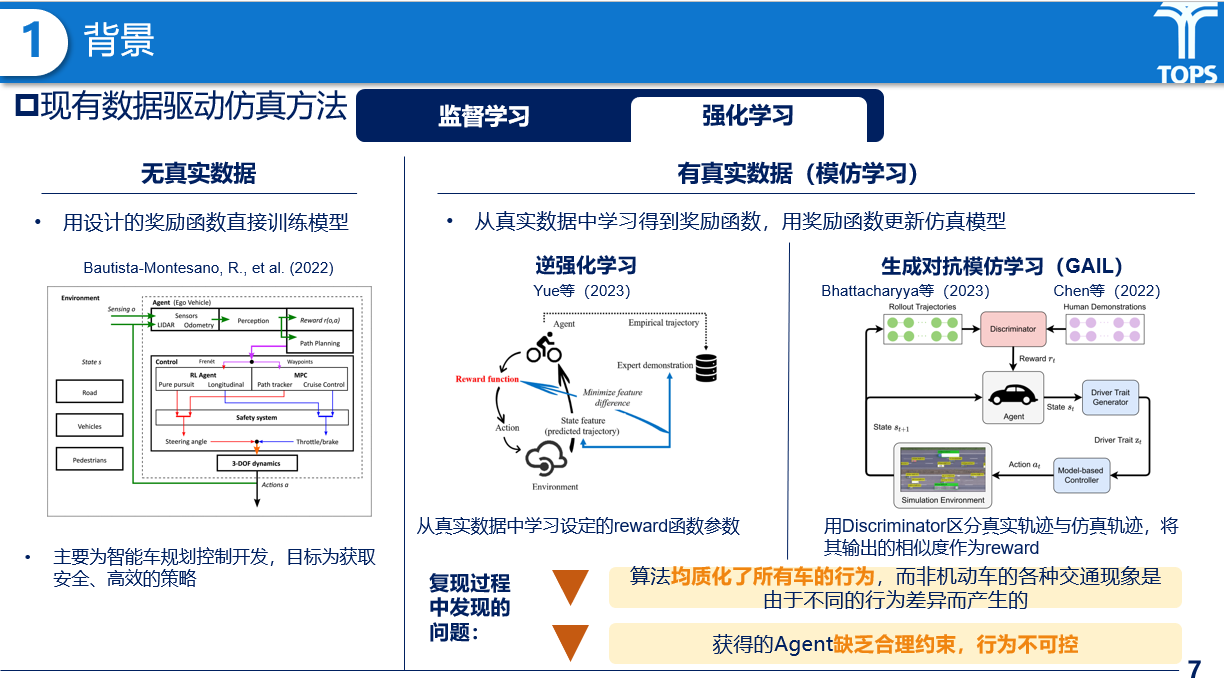
魏书樵首先介绍了研究背景。机非混行是自动驾驶车必须应对的场景,为满足自动驾驶的测试需求,要建立准确、可靠的非机动车仿真模型。与轨迹回放、基于规则等模型相比,数据驱动的模型仿真精度高,能高保真地复现各种交通行为。监督学习和强化学习是数据驱动模型的常用方法,但在行为异质性与可控性、约束合理性方面存在不足,无法真实复现非机动车行为。
汇报内容
接下来,魏书樵详细描述了提出的位置奖励增强的GAIL算法。在Agent设计部分,研究采用本车、周边机动车与非机动车信息作为状态空间,采用横纵向加速度作为动作空间,Agent采用MLP架构;在Reward设计部分,为解决建模均质化的问题,在模仿学习中添加位置奖励,使其能够对不同轨迹做出精细化的反馈,为解决行为不可控的问题,以半圆形区域作为边界设定惩罚并采用PPO-Lagrangian处理安全约束。
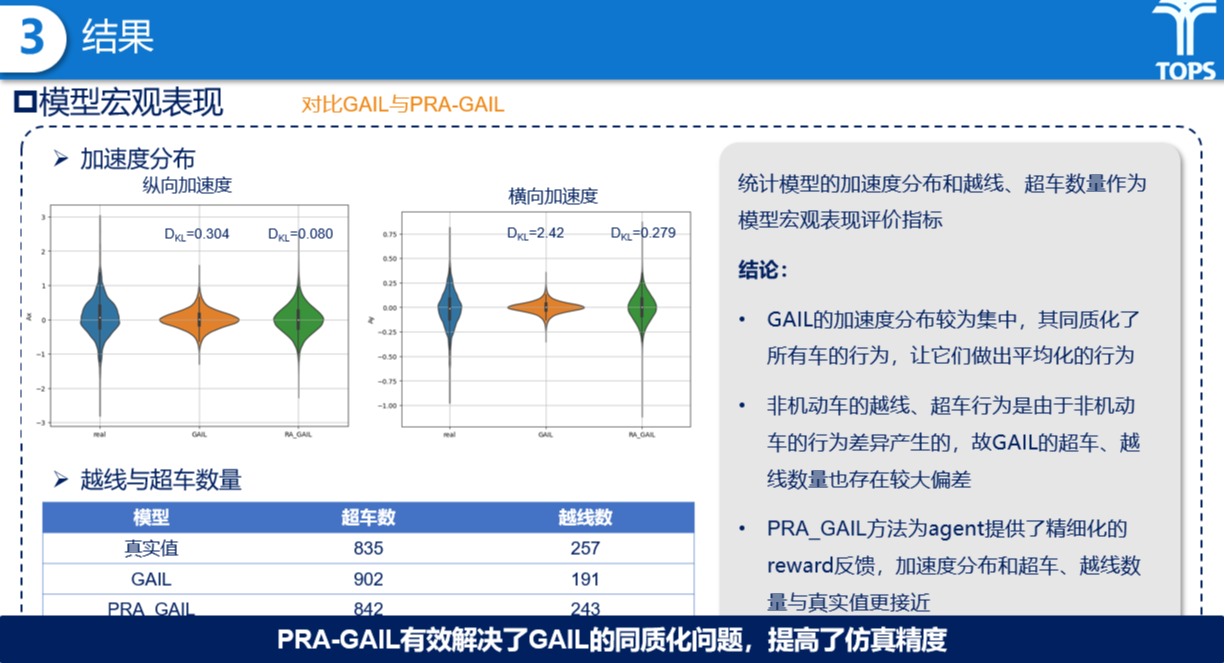
最后使用曹杨路机非标线隔离路段非机动车数据进行模型学习与测试,并针对测试集模型损失、仿真环境下宏观参数分布、仿真环境下微观行为分布进行结果说明。结果显示:强化学习方法在模型损失方面优于监督学习方法,但所提PRA-GAIL与GAIL表现结果无明显差异;所提PRA-GAIL方法在加速度分布、越线超车行为数量等模型宏观表现上更加接近真实情况;所提PRA-GAIL方法在TTC与超车侧向间距等微观指标上与真实分布无显著差异。此外,针对单车仿真场景与多车仿真场景中出现的避让等现象进行了合理解释。
汇报内容
2022级硕士生刘佳琦对模仿学习与强化学习的差异,仿真场景的迁移性提出疑问,2019级博士生周东浩对Agent架构与Reward项的设计提出了改进意见,同时对模型中拉格朗日乘子更新方法、危险场景定制生成提出疑问。2022级硕士研究生杨宇豪对多模态预测与确定性预测结合、演示场景迁移提出疑问与建议。2019级博士研究生李建强对不合理动作纠错机制提出建议。
倪颖老师介绍了研究的背景及在现实世界的应用意义;秦国阳老师对判别式模型的处理方式提出了问题;杭鹏老师从论文发表的角度提出建议,认为应当明确研究挑战,同时应结合实验进行结果验证;梁浩阳老师对仿真结果的基本图提出了问题。岳李圣飒老师对超车影响与安全约束的设计提出了建议。田野老师认为研究应当回归自动驾驶测试,同时在方法论、数据集、工具链形成生态系统,构建共同话语体系。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}