2023年11月2日下午16:30,TOPS第133期组会于通达馆A102会议室线下举行。本次组会由2019级博士生陈雪剑与大家交流讨论《基于网联车辆协作式众包的大规模城市路网智能监测》的相关内容。课题组全体老师同学出席了本次组会。

汇报时刻
陈雪剑首先介绍了自己在日本留学的感受,并为大家介绍了申请CSC的流程和注意事项。以及对chatgpt的合理使用。
接下来介绍了研究背景,交通事件与交通状况实时监测,对交通系统安全有效运行至关重要。交通事件类型杂,静动态共存,时空分布广,大规模监测存在挑战。路侧静态监测难适应,车端动态监测是突破口。尽管研究证明利用 CAV 作为移动监视器去监视路网是一种高效的监视方案,但是应用于大规模城市路网仍然存在巨大挑战。研究环境需要算法满足出行需求、保护隐私安全、适应路网规模的要求。

汇报内容
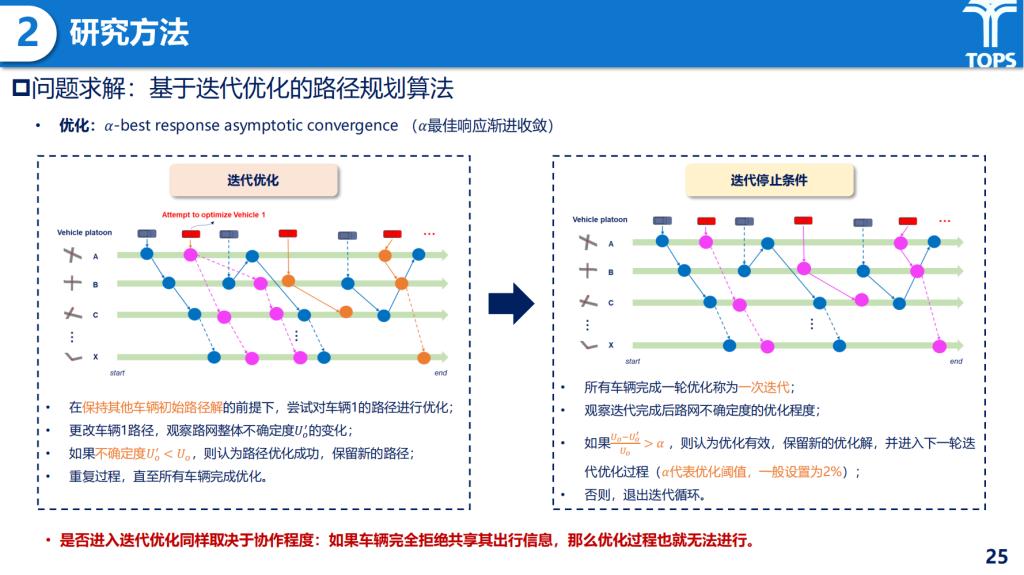
在问题建模部分,与传统的VRP或者巡游问题相比,车辆在约束下不仅要覆盖路网中尽可能多的节点,还需要多次且均匀的访问节点。所以节点不仅需要多次访问,也需要均匀的访问,这里同时将访问时间间隔的均值和标准差都纳入目标函数中。新的车辆驶入路网时,首先计算其到达各个节点的期望时间,然后计算车辆驶入前后路网不确定度变化。路径收益由路网不确定度变化值和其自身的绕路比例共同确定。完全协作的算法需要每辆车共享其出行的时间、OD、行驶路径 ,但是并非所有出行者都愿意分享信息。所以为出行者提供了不同的隐私选择,考虑信息共享和隐私保护将协作的等级分为了三类(R0,R1,R2)。最后基于迭代优化的路径规划算法求解。
汇报内容
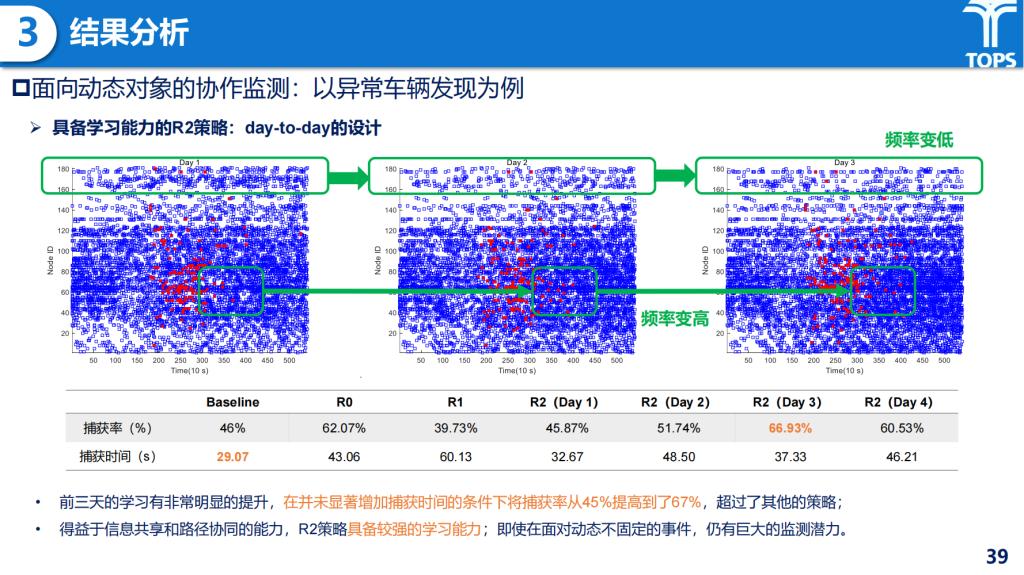
最后结果分析评估了Vsensor 平台宣城市一个月数据。得出结论CAV协作可以显著提高时间反复性、CAV协作可以显著提高空间遍历性、协作信息共享程度对时空覆盖度的边际作用、绕路约束对时空覆盖度的边际作用。以异常车辆发现为例面向动态对象的协作监测,R2策略虽然可以覆盖更多地区,但是其对市中心点的访问频次会低于R0策略,所以捕获率不升反降。为了提高目标车辆的捕获率,针对R2策略提出了的学习算法,通过学习目标车辆的分布而调整节点的权重修正车辆的行驶路径。未来工作为权衡系统最优计算效率和隐私需求,以及动态协作监测的自适应调节。
汇报内容
2020级博士生赵晓聪强调了静态检测对检测异常行为的积极作用,2021级博士生房世玉对节点建模引入重要性因素以及求解的先后关系提出疑问,2022级硕士生刘佳琦对违规现象严重性、所选路网的性质、优化算法选择提出疑问。
梁浩阳老师对node和link的区别提出问题,田野老师分析了渗透率和交通分配的关系、系统的薄弱点,倪颖老师对异常车辆的分布获取提出疑问,岳李圣飒老师假设了应用的场景、肯定了研究的价值,杭鹏老师建议研究需要明确现实问题。最后孙剑老师强调了研究的需求和目的,以及对出国同学的严格要求和殷切期盼。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}