2023年11月30日,TOPS课题组第135期组会于通达馆102线下召开。本次组会由21级博士黄䶮、22级博士范镓麟、21级博士房世玉带来自己的预开题答辩汇报,分别和大家讨论交流《基于场景的自动驾驶虚实融合测评方法研究》、《面向自动驾驶测试的数据驱动交通流仿真》、《人机混驾环境无信号交叉口智能网联车协同式决策》。课题组全体老师同学出席了本次组会。
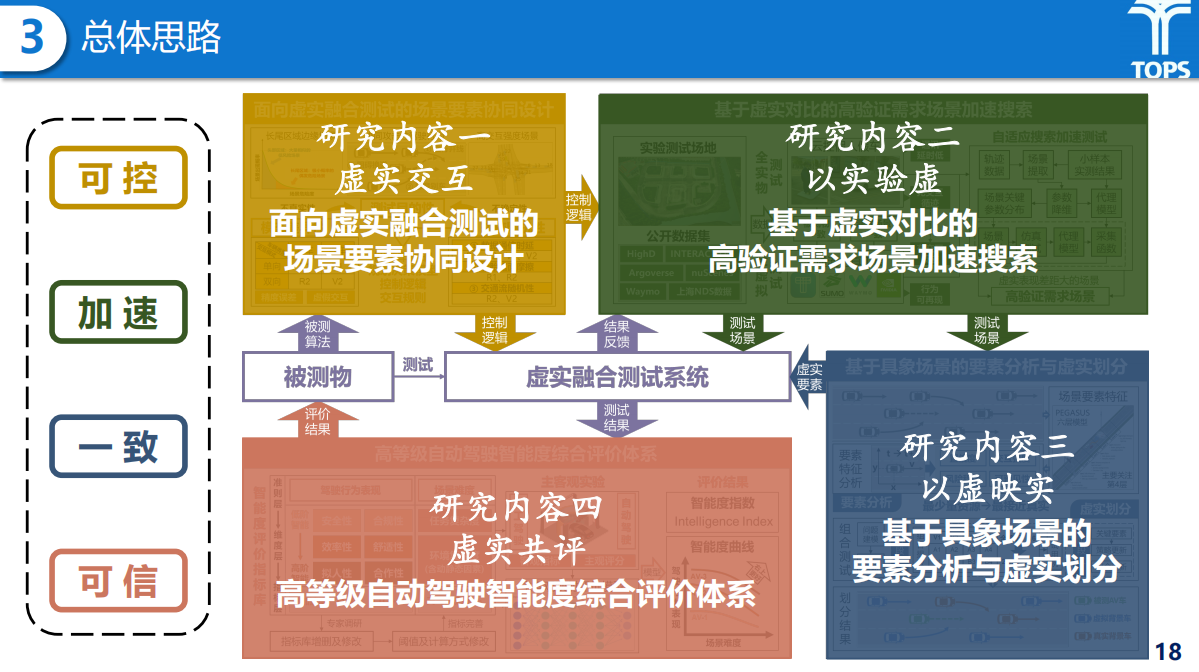
首先汇报的是黄䶮,为大家带来《基于场景的自动驾驶虚实融合测评方法研究》。在研究背景和文献综述部分,他指出科学的测试评价方法对于自动驾驶技术发展的重要意义,回顾当前基于里程的公开道路测试和基于场景的虚拟仿真测试,分别存在场景随机不可控、真实性不足等问题,提出基于场景的虚实融合测试作为仿真和实测的优势互补解决方案。并总结基于场景的自动驾驶虚实融合测评面临的四大问题与挑战,根据现实挑战确定“可控、加速、一致、可信”四大研究目标和“虚实交互、以实验虚、以虚映实、虚实共评”的技术路线,预计构建一套科学、完整的虚实融合测试方法流程。最后强调了该研究的创新点,介绍了研究基础,展望了未来的工作计划。
黄䶮汇报时刻
在问答环节,张赫就面向虚实融合测试的场景要素协同设计提出了疑问。倪颖老师建议对虚实融合解决的问题进行明确,对虚实融合场景的设计、虚实融合结果的可信度提出疑问。孙剑老师对问题和方法论的明确、研究内容的创新点和逻辑关系提出改进建议。岳李圣飒老师对智能度评价部分的方法论提出改进建议,对高等级自动驾驶智能度的测试是否受代理模型智能度影响提出疑问。秦国阳博士建议明确虚拟融合测试排他性的需求。梁浩阳博士对综合评价体系的构建提出改进建议。
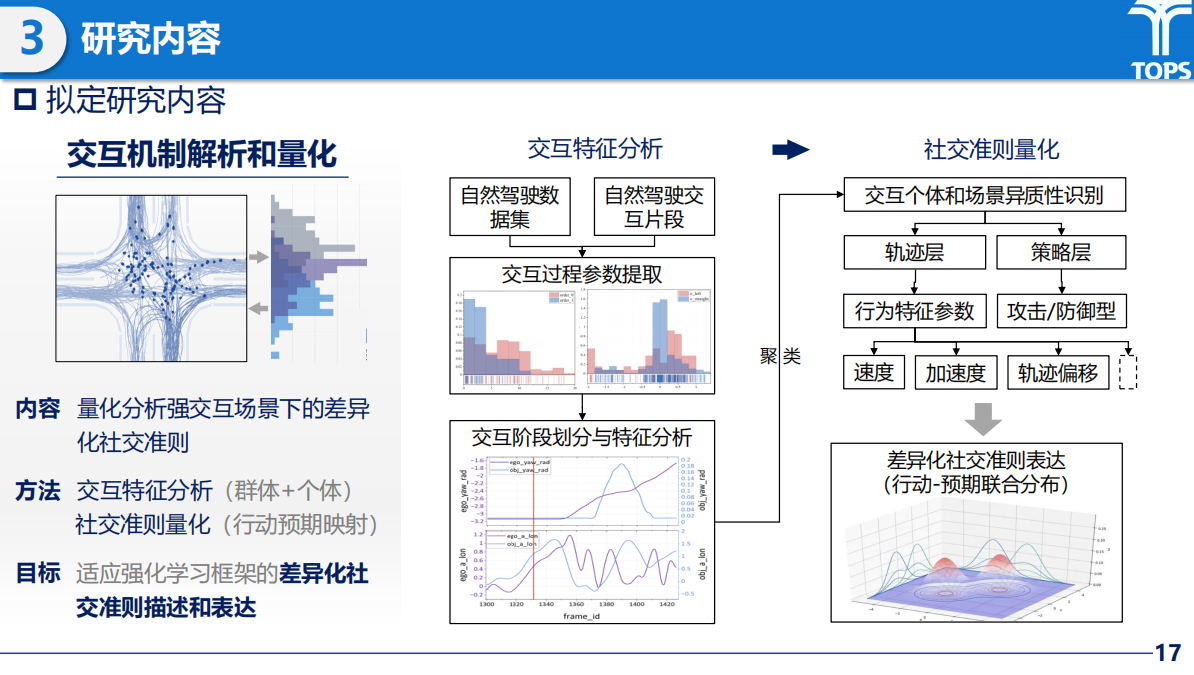
接下来范镓麟为大家带来了《面向自动驾驶测试的数据驱动交通流仿真》的报告,在研究背景部分指出虚拟仿真成为自动驾驶测试和验证的核心手段之一,期望通过数据驱动方法来建模交通流高维特征。并在研究现状部分总结了现有的机理驱动建模方法和数据驱动建模方法和存在的一些问题,指出亟需统计分布一致、适应主车策略、交互策略可控的交通流仿真。根据测试需求拟定“数据驱动+面向测试”的技术路线和“交互机制解析和量化、多分辨率交通流仿真、考虑被测物影响的仿真、策略动态可控仿真”的研究内容。最后介绍了研究可行性、预期研究成果和创新点,并展望了未来的研究工作计划。
范镓麟汇报时刻
在问答环节,孙剑老师指出要明确自动驾驶测试的交通流需求、仿真需求,要找到自动驾驶测试的真问题。倪颖老师对多分辨率仿真和测试场景生成提出改进建议。梁浩阳博士对纯AV环境下的仿真测试提出问题。杭鹏老师对传统的交通流仿真和自动驾驶测试的目的是否存在冲突、应该如何界定提出疑问。
最后,房世玉为大家带来了《人机混驾环境无信号交叉口智能网联车协同式决策》的报告。在研究背景和研究现状部分,他指出单车智能规划决策能力不足,协同式规划决策具有研究的现实需求,现有研究缺乏多参与者交互研究、研究场景集中于纯网联环境难以直接扩展至真实混驾环境等问题。针对这些问题,提出了交互行为分析、协同系统差异性分析、异构多车协同的研究思路和人类驾驶员交互行为建模、纯网联环境协同决策建模、人机混驾环境协同决策建模的研究内容,然后完成由仿真验证到硬件/驾驶人/实车在环的协同结果测评。最后他介绍了本研究的创新点,展望了未来的工作计划。

房世玉汇报时刻
在提问环节,孙剑老师指出研究内容逻辑不连贯、创新点不足等问题,提出需要和前人研究区分开、明确需要协同的问题和场景等建议。倪颖老师对汇报中提到的驾驶过程不确定性提出问题。赵晓聪就现实问题的寻找上提出建议。梁浩阳博士对车车协同相对单车智能的效率提升提出问题。秦国阳博士指出协同的成本和效益是有冲突的,对寻找一个协同的最优方案提出建议。
至此,本次组会圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}