2023年7月8日,TOPS第128期组会于通达馆A436线下线上同时进行。本次组会邀请了加拿大麦吉尔大学(McGill University)土木工程系的孙立君老师与我们分享《Calibrating Car-Following Models via Bayesian Dynamic Regression》的相关内容,课题组全体师生出席了本次会议。

孙立君老师汇报时刻
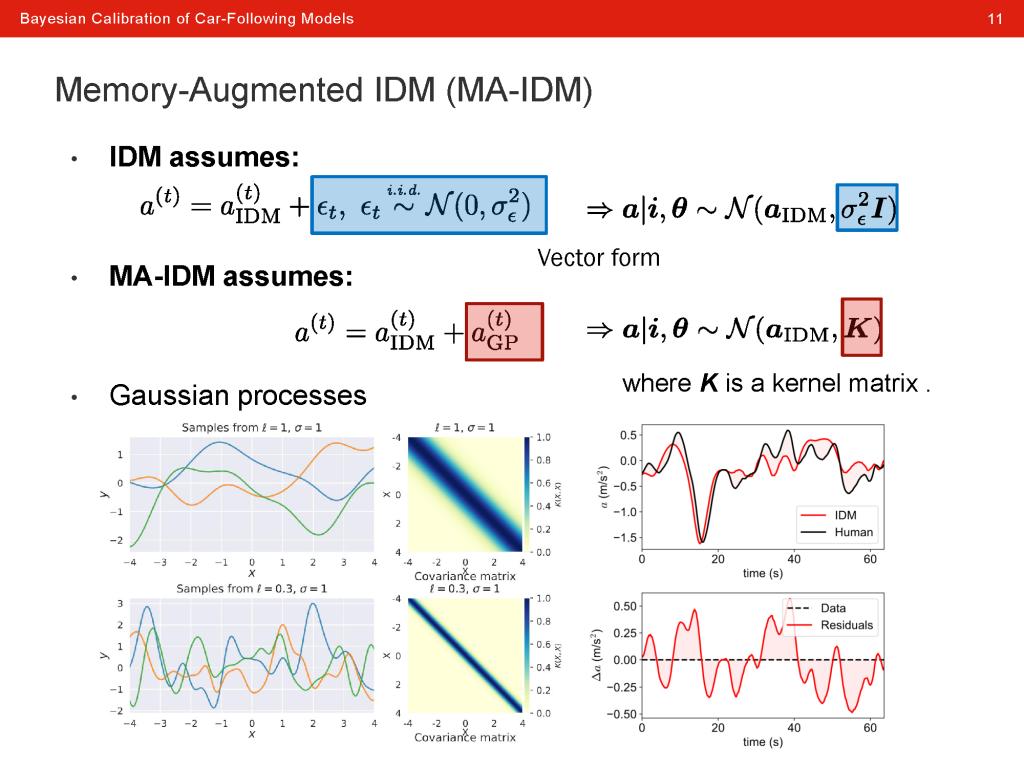
孙立君老师首先对经典车辆跟驰模型——IDM模型进行深入剖析。传统的IDM模型基于即时前后车数据建立简单非线性函数,其对历史信息的忽略会导致对真实数据的解释性较弱;模型标定时往往采用最小二乘法,误差项的时间相关性导致参数的估计有偏;且IDM模型无法建模驾驶人异质性、后车对前车刹车行为的反应等。
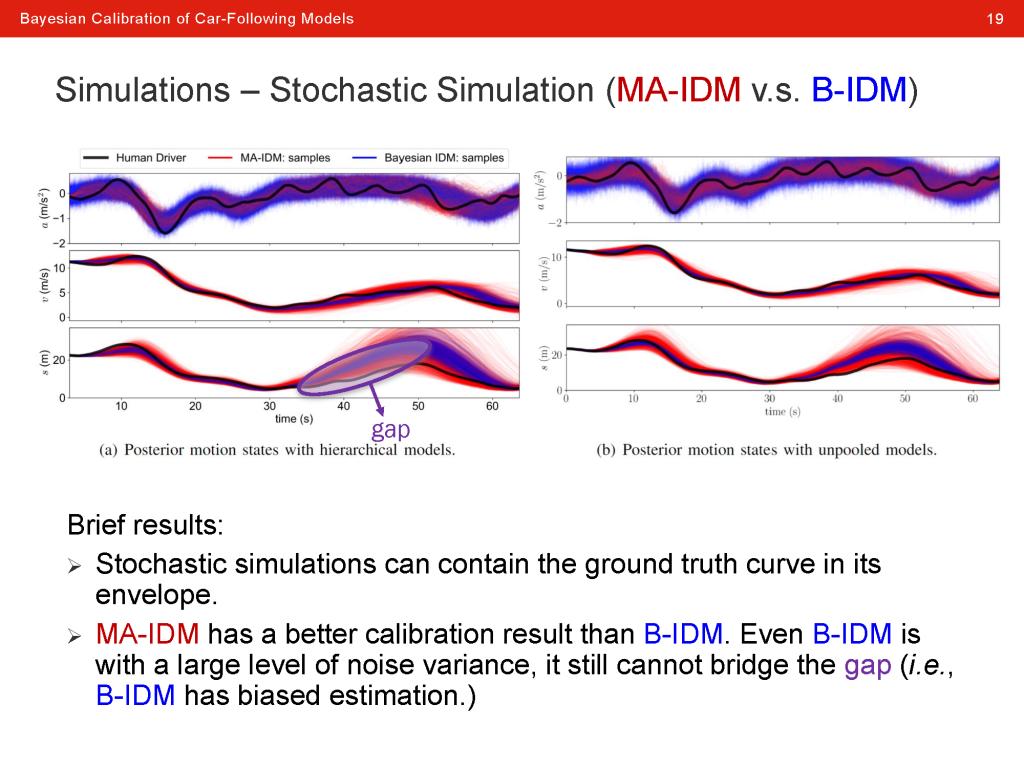
因此孙老师团队在2022年提出MA-IDM模型,利用高斯过程捕捉误差项的时间相关性,通过层次贝叶斯模型学习驾驶行为的异质性。结果表明MA-IDM模型相比B-IDM模型具有更好的标定效果,MA-IDM模型在4~5s内捕获相关性。
汇报内容
为了克服MA-IDM模型的高斯过程只能捕捉误差项正相关性的不足,孙老师团队进一步提出了Dynamic IDM模型,结合自回归与动态回归框架表征随时间变化的误差项,为当前模型中常见的独立误差假设提供了统计上的严格替代方案。最后通过HighD和OpenACC数据验证了模型的有效性,结果表明,跟驰行为应该包含过去10秒的行为,捕捉真实驾驶数据中的短期正相关性(0 ~ 5 s)和长期负相关性(5 ~ 10 s)。该框架继承了传统汽车跟驰模型的简洁特点,提供了更真实的仿真。
汇报内容
孙老师的报告激发了大家浓厚的兴趣。在讨论环节,23级硕士生叶轶淳就该研究能否迁移到自动驾驶领域进行提问;22级博士生梅月雯就加速测试场景下仿真结果的不确定性进行提问;22级硕士生刘佳琦就改进方法的计算效率、是否考虑加入人因、深度学习在微观建模的应用方面展开提问;23级博士生刘学凯就模型在轨迹预测上的应用前景进行提问;22级博士生聂通就kernel的选择等算法方面进行提问;20级硕士生李政就跟驰模型的马尔可夫性进行提问。
岳李圣飒老师表示孙老师所分享的内容令他在残差项处理等方面受益匪浅;杭鹏老师表示孙老师的汇报不仅是学术交流,还从审稿人的角度给课题组的科研工作启发;梁浩阳博士和孙老师在行人建模方面进行探讨,社会力模型与IDM的相似性使得将残差项的处理方法引入行人模型成为可能。
至此,本次组会圆满结束!
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}