2022年6月16日,TOPS课题组第111期组会于线上顺利召开。本期组会有幸邀请到2019级硕士生饶红玉与大家交流《驾驶人异质性分析与个性化驾驶行为建模》的相关内容。
饶红玉首先从研究背景部分出发,表明人因在驾驶行为中有重要地位,并由此引出驾驶人内在异质性的概念。饶红玉认为,现有针对驾驶人内在异质性的研究,由于未考虑行为变化的预测且驾驶行为的变化过于复杂,在实际应用时会引入很大的计算量,导致后续的分析和研究无法进行。在驾驶行为影响因素分析领域,大多数研究只从单方面进行了分析,未能同时考虑多个因素的影响。通过与改进的跟驰模型的参数更好地描述受人因影响的驾驶行为中的异质性。

研究现状与背景
接下来,饶红玉从驾驶人内在异质性的定义与识别,驾驶人异质性预测与影响因素分析,基于驾驶人内在异质性的个性化驾驶行为建模三大方面进行了展开。
首先将驾驶人的内在异质性定义为其驾驶行为在正常与异常之间的变化,提出识别驾驶人内在异质性的关键在于识别异常驾驶行为,认为标定得到的基准跟驰模型会收敛到驾驶人大部分时间内保持的正常驾驶行为上,与基准跟驰模型有明显不同的驾驶行为即为异常。将异常驾驶行为的起始时刻定义为跟驰间距的百分比误差刚开始增长时,即误差超出阈值前的最后一个局部最小值处。
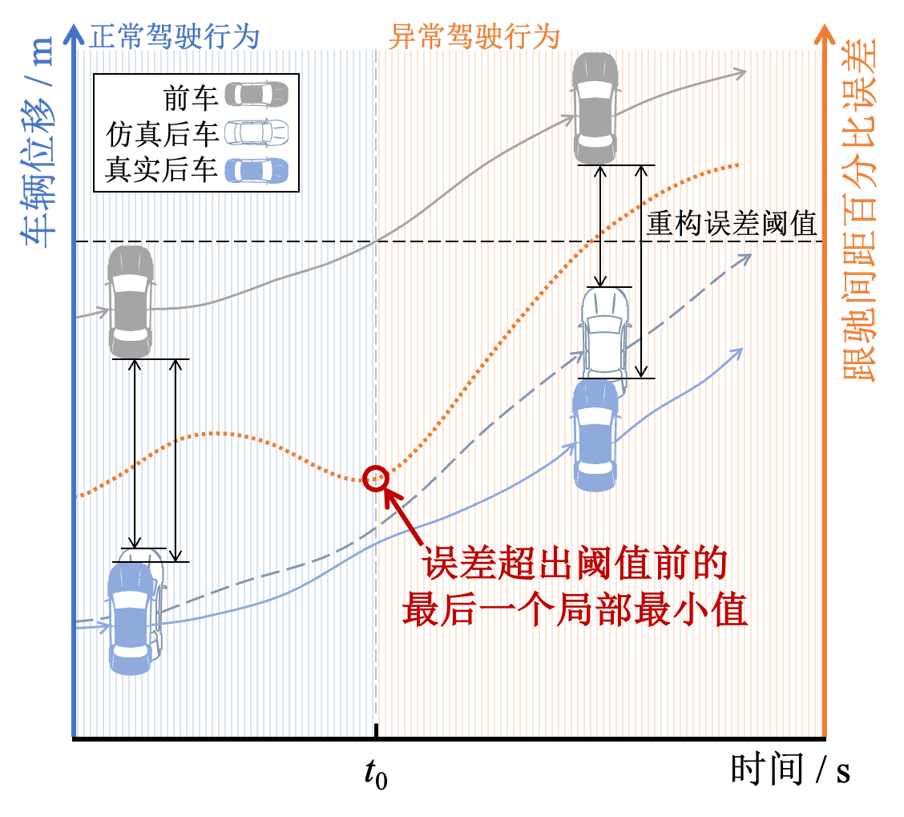
异常驾驶行为识别
在驾驶人异质性预测部分,选择了涵盖人-车-路-环境全要素的驾驶行为指标作为了特征指标基于回归模型进行了建模。由于回归模型在面对复杂问题时的性能表现一般,为了尽可能地得到更好的结果,在回归建模前进行了特征指标分层、研究时段采样、特征指标初筛三项工作。基于驾驶人内在异质性的离散选择特征和数据结构特点,选择了随机效应多层logit模型建模,结合了基于深度学习的Transformer模型对驾驶人内在异质性进行了预测。
在基于驾驶人内在异质性的个性化驾驶行为建模部分,由于基准跟驰模型难以表征异常驾驶行为,故重新标定异常驾驶行为的跟驰模型参数,以提升模型的整体精度。由驾驶行为分类器在每一仿真时刻预测输出当前的驾驶行为分类,从而指导驾驶行为模型为驾驶人适用相应的模型参数。
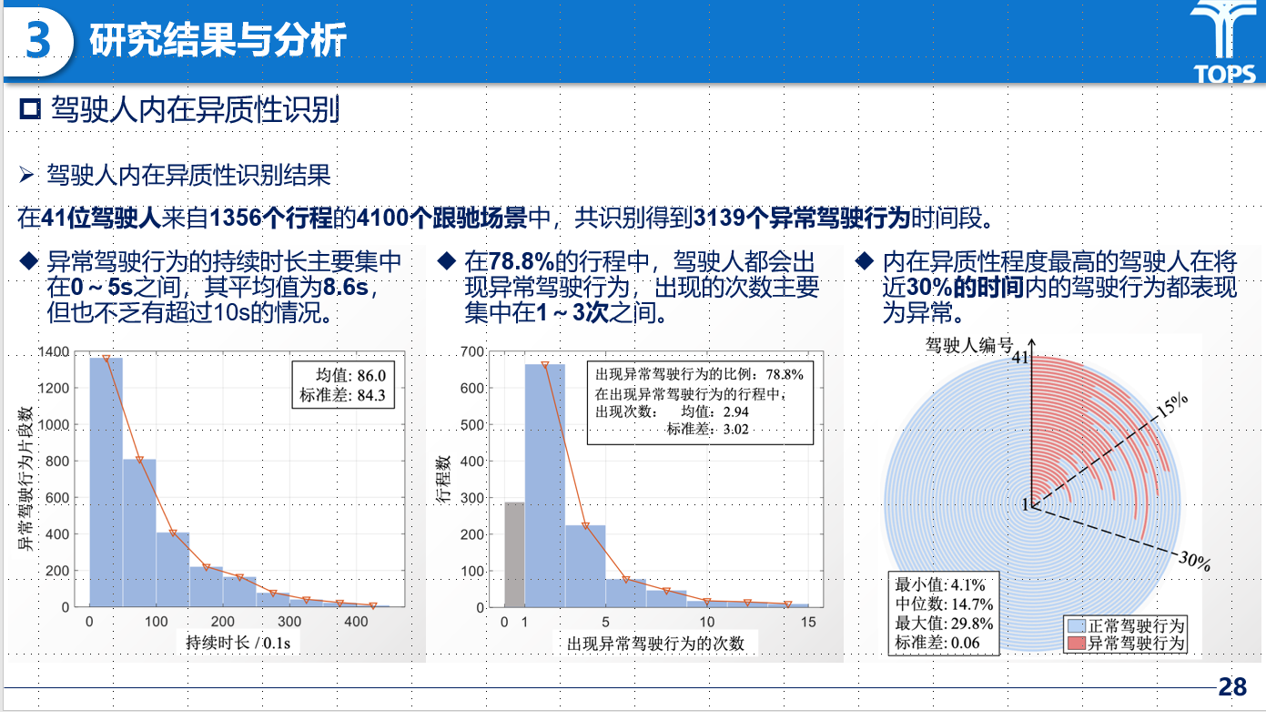
之后饶红玉对异质性识别与预测模型进行了结果分析。在41位驾驶人来自1356个行程的4100个跟驰场景中,共识别得到3139个异常驾驶行为时间段。结果表明内在异质性程度最高的驾驶人在将近30%的时间内都表现出异常驾驶行为,57%的情况是因为驾驶人跟驰前车的间距过远(明显远于基准跟驰模型)而被识别为异常;15%的异常驾驶行为中后车是处于减速状态,驾驶人更多在匀速或加速行驶时表现出异常行为。结果认为车辆交互是最显著的影响因素来源,同时交通环境对驾驶人的影响有限,而驾驶人的特性不会对其造成显著影响。
研究结果与分析
基于回归模型的驾驶人内在异质性预测模型对样本集中正常和异常驾驶行为采样时段的分类准确率为79.8%,Transformer模型对比时序数据分类问题中最常用的长短期记忆神经网络和前述研究中所用的Logit模型都有着更高的准确率,整体准确率高达94.9%。
在基于驾驶人内在异质性的个性化驾驶行为模型部分,为提升模型的整体精度,为每个驾驶人额外标定了异常驾驶行为处的跟驰模型参数。
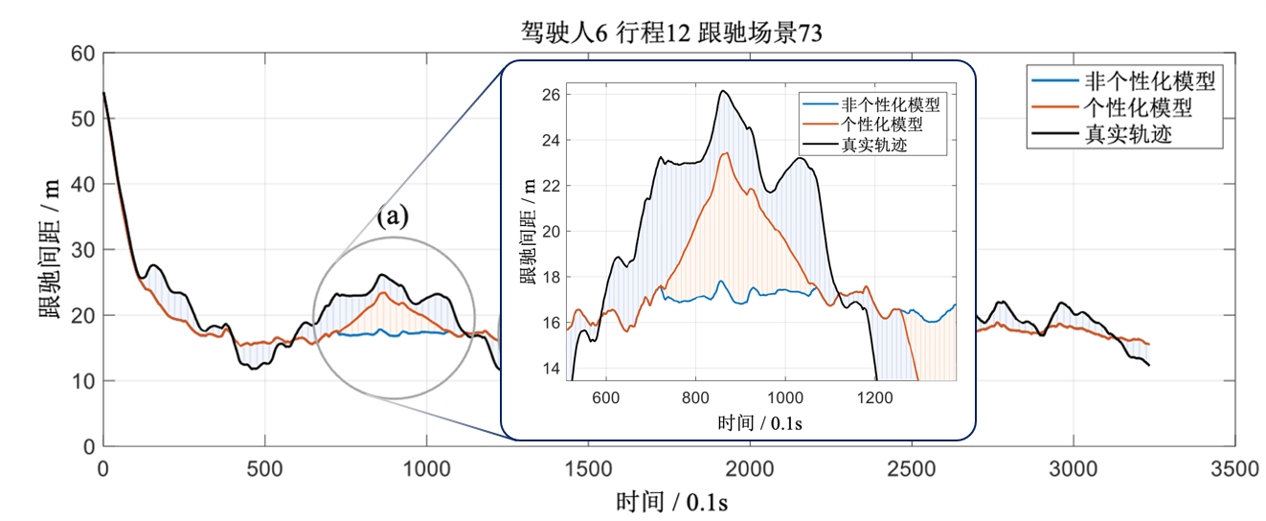
个性化驾驶行为建模结果及示例
最后,饶红玉对其主要结论和创新点进行了总结,并对其研究进行了进一步的展望。
在最后的讨论环节中,孙剑老师首先对饶红玉的工作表示了肯定与认可。朱奕昕询问了重构误差阈值的具体含义,张铎与饶红玉讨论了在识别中跟据不同驾驶人的特征设置不同的阈值标准的必要性;李政询问了理想轨迹线是否会发生变化,一次异常状态后返回正常状态的过程中是否可以看作是两次异常状态等非常深刻的问题。
秦国阳问道Transformer的标签共包含几类,和各类标签是如何识别出来的,如何区分激进和保守并建议到针对不同类型的驾驶异常行为可以细化深入进行分类;倪颖老师对如何确定驾驶模式是相同或类似的进行了提问,并对个性化驾驶行为的三类划分进行了提问,个性化模型标定后如何应用到仿真或其他地方(异质交通流仿真);杭鹏老师提出个性化、异质性、驾驶风格等都能表征驾驶行为,如何理解不同概念之间的关系;在交互的过程中,前车换道会对本车的异质性产生影响,如果考虑到交互的情况,能不能在交互的情况下考虑异质性的关联们如何去表征;驾驶异质性能否进行预测,以达到辅助算法决策的设计的目地;岳李圣飒老师提问道Transformer模型使用后精度显著提升,是Transformer模型在分类上具有结构优势还是对于这个具体问题有较好的表现;除了分类场景有没有其他场景这种模型会表现得比较好;田野老师认为驾驶行为的研究是比较吸引人的,并给出了后续工作的一定建议,例如手机使用、路怒、智能网联等;问题在于数据量偏少;措施:即会对实际情况有何改善等。
孙剑老师最终进行了总结,提出了这个工作继续进行的必要性,并进一步肯定了驾驶行为分析和驾驶人状态监测工作的意义。孙剑老师认为,异常驾驶行为的识别可以进一步深化细化研究,包括使用的方法和检测的效率等;创新还应侧重于场景驱动和问题导向,计算机方法上的创新和提升不能作为主要驱动力。孙剑老师给出了包括驾驶异质性预测对比的方法是否可以进行丰富,计算复杂度、效率和时延上是否可以进一步进行提升;采用联邦学习等方法有助于解决用户的隐私保护的优势;分心的异常行为和常规异常行为的差异在哪等等意义深远的建议,希望这一研究可以继续深入挖掘下去。
至此,TOPS第111期组会圆满结束!祝愿即将毕业的三位2019级硕士生同学答辩顺利,前程似锦!
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}