2025年5月29日8时,TOPS课题组22级硕士研究生蔡依林、刘佳琦、王思涵、杨宇豪、赵东虎、郑文涛6位师兄师姐的毕业答辩在学院楼A102会议室顺利举行。同济大学岳李圣飒老师任答辩秘书,答辩委员会由上海理工大学赵靖教授、上海电科智能系统股份有限公司沈峰教授级高工、孙剑教授、倪颖副教授、田野教授组成,其中赵靖教授担任答辩委员会主席。
各位同学硕士毕业论文的主要工作如下:
1.蔡依林《面向自动驾驶测试的机非交互危险场景识别与生成》。蔡依林指出机非混行环境下危险场景识别与生成研究不足,导致现有测试场景库无法全面反映真实风险。研究提出基于自然驾驶数据的机非危险场景识别方法,结合双流网络模型实现危险片段自动分类,并对典型危险场景进行参数空间建模与采样生成。实验验证结果显示,提出的方法能够有效识别并生成多样化的高风险机非交互场景,有助于提升自动驾驶车辆的安全测试能力。

答辩时刻
2.刘佳琦《基于Transformer大模型的自动驾驶多任务决策研究》。刘佳琦指出传统自动驾驶决策系统泛化能力有限,难以适应复杂多样的驾驶环境,提出构建基于Transformer的大模型,以实现决策算法的持续学习和泛化提升。通过强化学习专家采样建立教师策略,进行GPT模型的离线预训练,并采用熵正则化和策略微调技术,使模型持续优化。实验结果表明,所提方法能够有效提高自动驾驶决策的泛化性与稳定性,并具备持续进化的能力。

答辩时刻
3.王思涵《基于主客观映射模型的自动驾驶车辆智能度评价》。王思涵指出现有自动驾驶智能度评价忽视了主客观评价之间的动态关联,导致评估结果存在盲区。针对该问题,构建了基于功能-性能-效能框架的五维驾驶行为客观指标体系,并设计了基于注意力机制的主客观映射模型,通过虚实融合测试实现智能度动态评估。研究表明,该模型能够有效建立主客观评价的映射关系,并提高自动驾驶智能度评价的准确性与解释性。

答辩时刻
4.杨宇豪《面向自动驾驶测试的数据驱动交通仿真研究及应用》。杨宇豪指出当前自动驾驶仿真测试存在场景交互性不足、难以复刻复杂驾驶行为的问题。针对以上问题,提出一种基于轨迹和地图统一离散化表征的基元预测方法,并设计了图结构建模与多层注意力机制融合时空特征,实现高保真与跨场景的仿真效果。研究成果表明,所提出的HIGTOP-Sim模型能够显著提升场景仿真的真实性与迁移能力,有效支撑自动驾驶测试需求。

答辩时刻
5.赵东虎《人机混驾环境下基于EHMI的AV增强交互策略研究》。赵东虎指出传统车外人机交互界面(EHMI)触发机制存在时机选择不当、信息冗余等问题,提出一种基于驾驶人意图不确定性的EHMI动态触发机制,并设计显式与隐式交互协同策略,以提升自动驾驶汽车在混驾环境下的交互效率与信任度。通过人在环路驾驶模拟实验验证,该策略显著提高了人类驾驶员对AV行为的理解与交互体验。
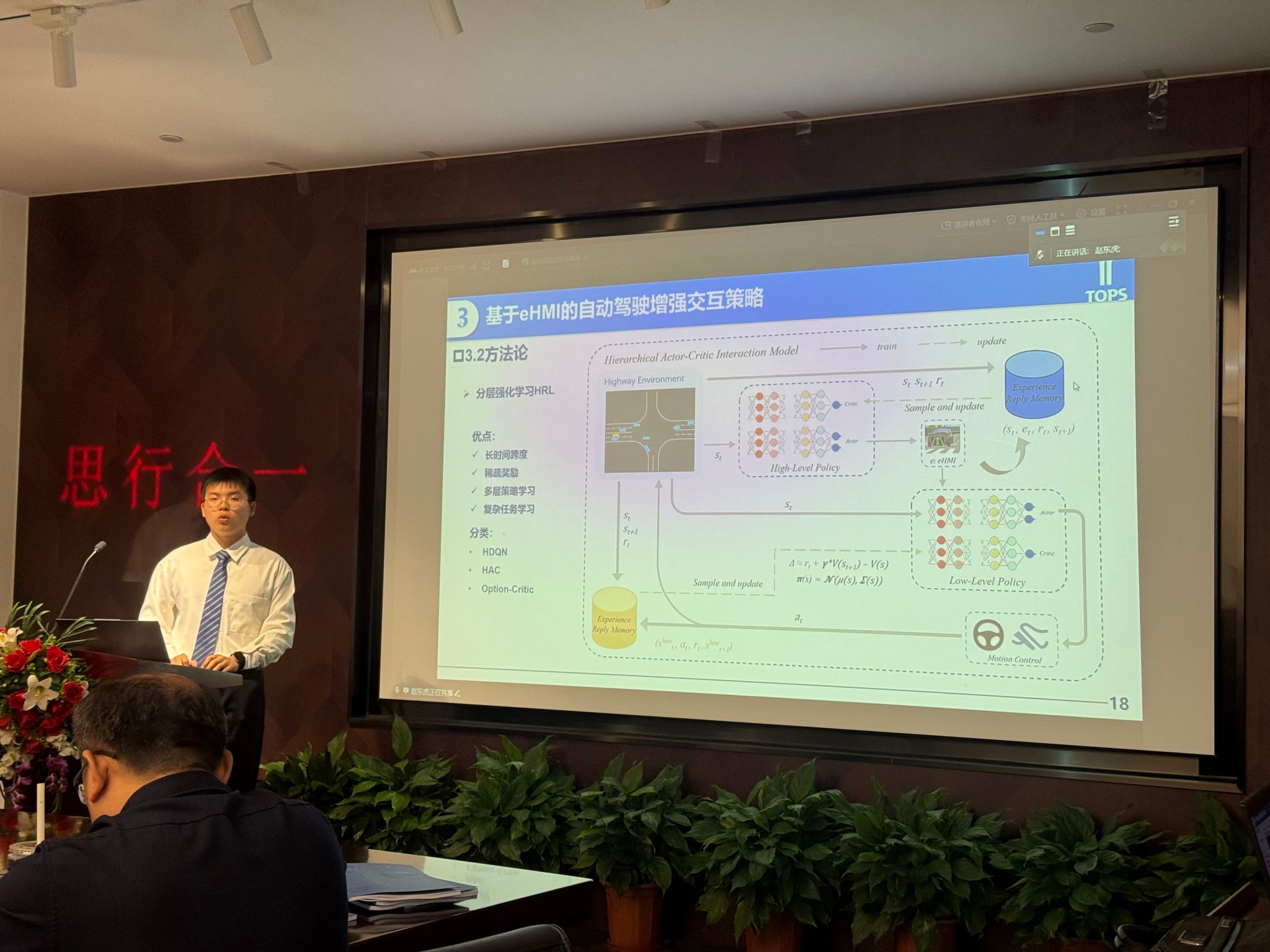
答辩时刻
6.郑文涛《面向自动驾驶安全性测评的场景指向性生成方法研究》。郑文涛指出现有自动驾驶测试场景缺乏高危场景的有效生成方法,导致测试场景覆盖不足。提出一种基于深度生成模型的特定功能场景生成方法和分层式跨场景生成方法,通过VAE与WGAN结合的模型结构,实现高风险场景的靶向生成。实验结果表明,该方法能显著提高测试场景的多样性与高危场景覆盖能力,有效支持自动驾驶系统的安全性评估。

答辩时刻
最后,经答辩委员会无记名投票决议,一致同意蔡依林、刘佳琦、王思涵、杨宇豪、赵东虎、郑文涛6位同学通过本次硕士论文答辩。

答辩合影
TOPS全体成员祝2025届毕业生毕业快乐!凡是过往,皆为序章。感恩相遇,无憾离别!
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}