2025年5月15日,TOPS第162期组会于通达馆A102线下举行。本次组会分别由内布拉斯加大学林肯分校土木与环境工程系的赵莉老师带来题为《电动汽车基础设施建设效益量化框架》以及课题组石皓天老师带来题为《智能网联混合交通流建模与控制优化》的讲座。课题组全体老师同学出席了本次组会。

汇报时刻
赵老师详细阐述了电动汽车基础设施建设的效益量化体系,强调该过程需通过六大系统性步骤逐步推进。具体包括:需求预测(Demand Prediction)、消耗估计(Consumption Estimation)、效益计算(Benefit Calculation)、效益分配(Benefit Assignment)、效益货币化(Benefit Monetization)以及效益分析(Benefit Analysis)。这一框架旨在从基础数据采集延伸至社会公平性验证,通过多维度的量化手段,全面评估基础设施建设的综合效益,为决策提供科学支撑。
最后,赵老师介绍了研究过程的启发,强调交通系统本质上是技术工程与政策决策的双重产物。他指出,交通基础设施的布局不仅依赖于技术可行性(如电动汽车充电网络的物理部署),更深刻反映了政策导向对资源分配的影响。
研究内容
在赵老师分享结束后,与课题组的老师和同学们进行了深入的交流讨论。叶轶淳对研究中电动汽车渗透率较低的问题进行了提问。孙剑老师对赵莉老师回到课题组进行汇报表示了欢迎与感谢,并高度认可了本研究中的社会问题技术化解决的思路和路线。
在赵莉老师分享结束后,课题组石皓天老师进行了《智能网联混合交通流建模与控制优化》的分享。

汇报时刻
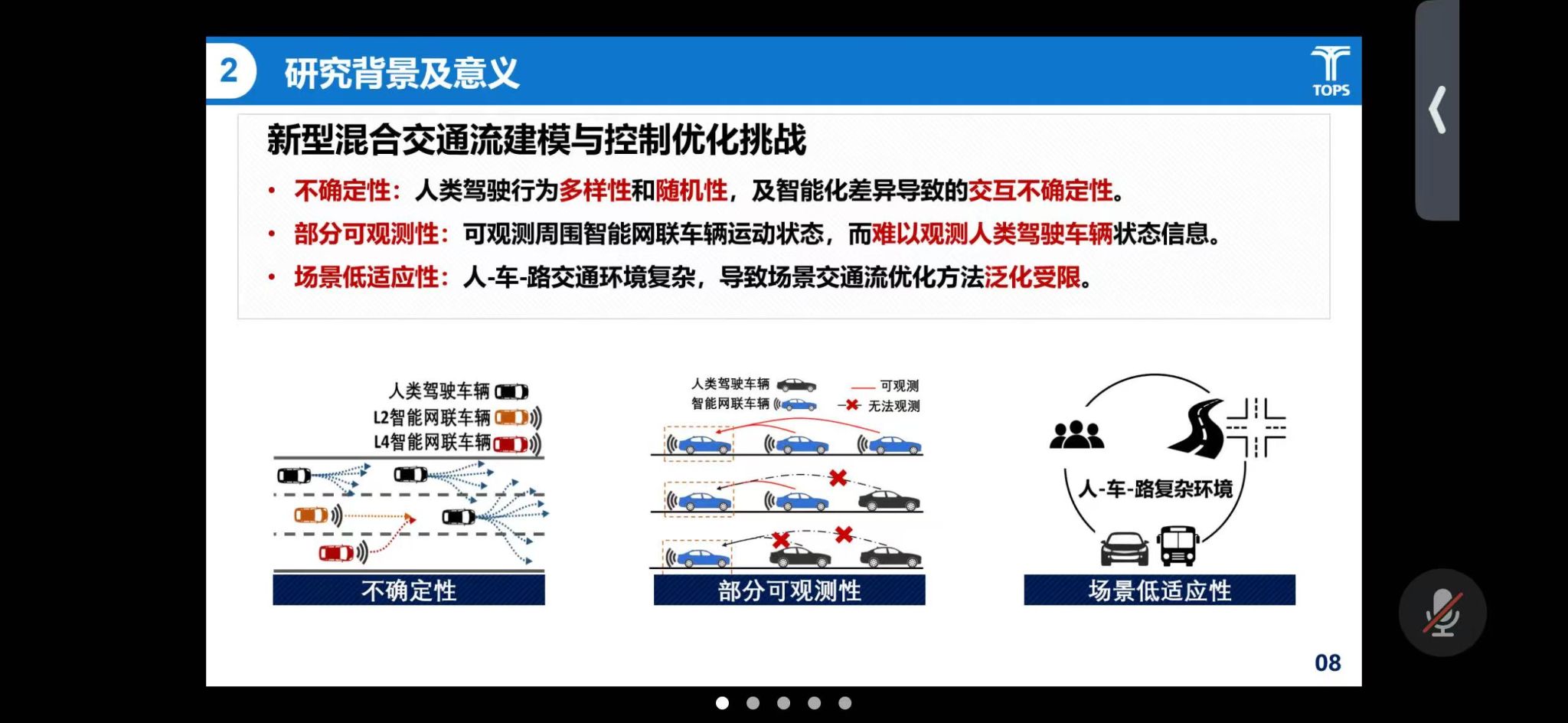
石老师指出智能网联新型交通流存在安全性和效率问题,建模控制难两大痛点。并从智能网联汽车与交互行为两个进行了深入阐述,进而在此背景下提出了混合交通流特性建模、道路连续流实时控制、复杂交通场景通用优化三个科学问题。

研究内容
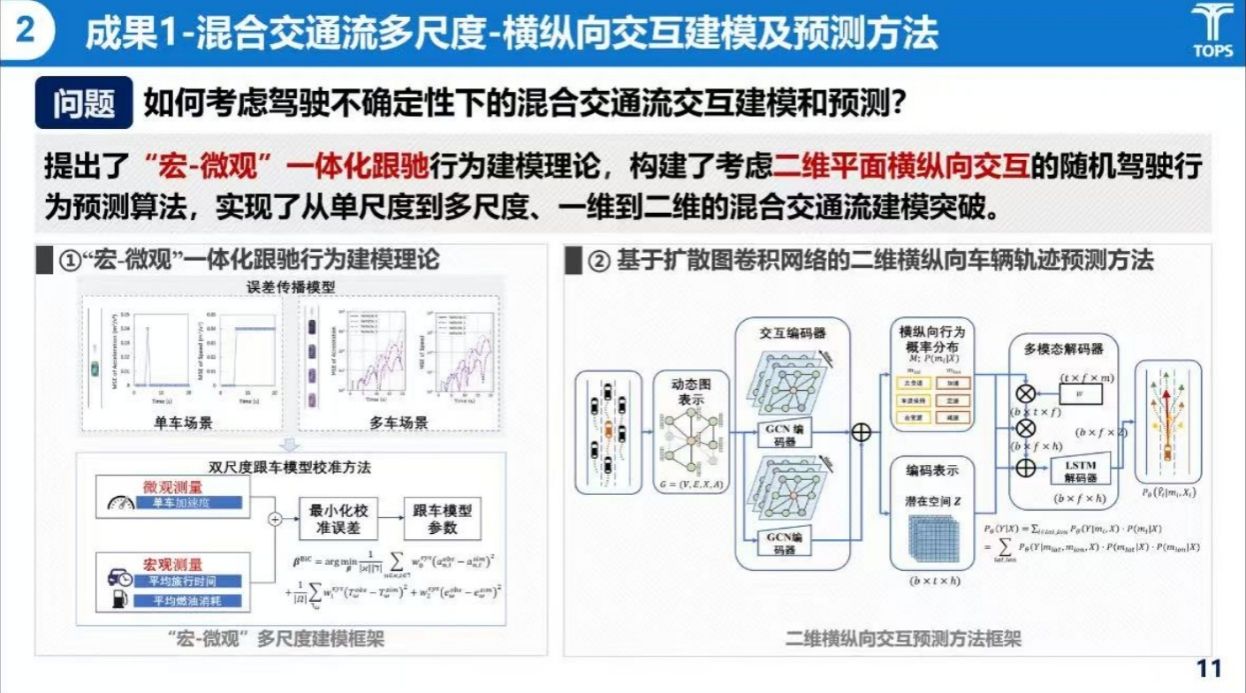
随后,石老师针对三个科学问题依次介绍了自己的解决方法。针对混合交通流特性建模问题,提出了“宏-微观”一体化跟驰行为建模理论,构建了考虑二维平面横纵向交互的随机驾驶行为预测算法,实现了从单尺度到多尺度、一维到二维的混合交通流建模突破。
研究内容
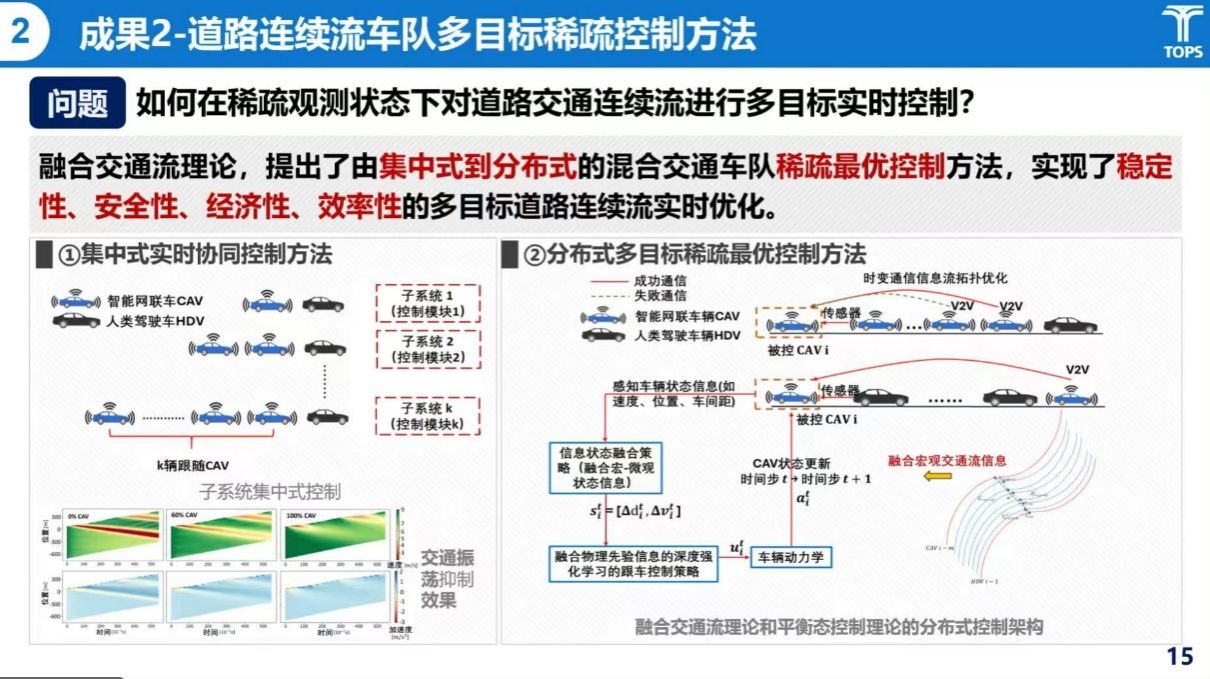
针对道路连续流实时控制问题,石老师介绍了基于融合交通流理论的由集中式到分布式的混合交通车队稀疏最优控制方法,实现了稳定性、安全性、经济性、效率性的多目标道路连续流实时优化。该方法数据-模型混合驱动控制算法支撑美国联邦公路局(FHWA)及美国网联自动化交通中心(CCAT)“基于CARMA平台的交通控制”等项目实车工程实施。并在实际测试中,提升实车安全性1.4倍,降低油耗17%。
研究内容
针对复杂交通场景通用优化问题,石老师提出了融合共识理论的数据-模型混合驱动交通流通用优化方法实现了多线形道路横纵向耦合优化、多交叉口轨迹协同优化,及多智能体公交运行优化。
研究内容
在完成上述成果的分享后,石老师还针对大模型驱动的端到端自动驾驶规划与控制、AV交互行为解析与道路交通效能影响评估、人机交互与人机共融三个研究方向进行了展望。随后,与课题组老师、同学进行了热烈的讨论。刘林坤对于端到端算法如何考虑不确定性进行了提问。房世玉请教了科研过程成果转化与自身获得感关系的经验。各位老师则针对端到端测试的设计思路,背景可控式测试场景实现方法,V2X方面研究可持续性,VLM端到端自动驾驶模型训练数据集等多方面进行了深入的讨论。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}