2024年9月18日星期三下午16:30,TOPS第149期组会于通达馆A102线下举行。本次组会由23级博士生刘懿如带来自己的研究进展汇报,与大家讨论交流《面向自动驾驶测试的交互式背景交通仿真》的相关内容。课题组全体同学出席了本次组会。
汇报时刻
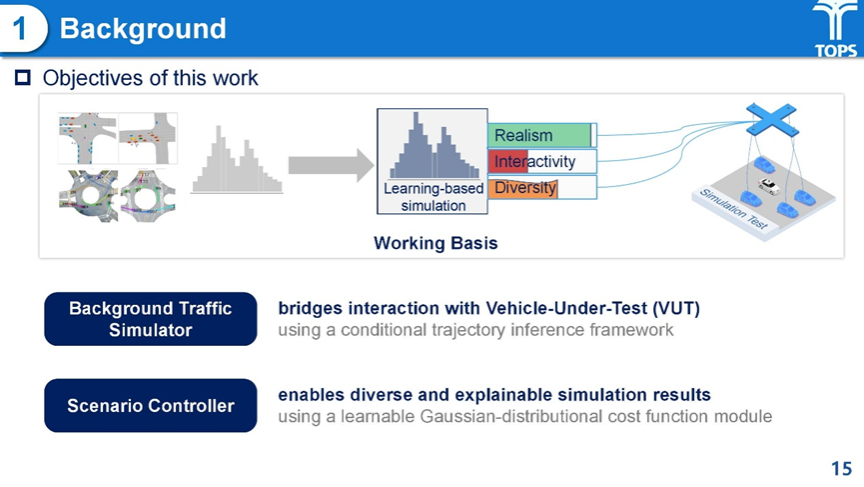
汇报内容涵盖研究背景、研究方法、实验结果和总结四个部分。在研究背景部分,刘懿如同学介绍了当前自动驾驶测试中仿真环境的重要性。仿真测试是自动驾驶技术落地前的必要环节,但现有的仿真测试多采用单一背景交通模型,缺乏真实世界中多样且复杂的交互性,难以兼顾轨迹拟真度、交互性和多样性。因此,刘懿如同学提出了构建可控的交互式背景交通仿真模型的研究目标,旨在通过生成高真实度和多样性的背景车辆行为模拟,提高自动驾驶车辆测试的有效性。
汇报内容
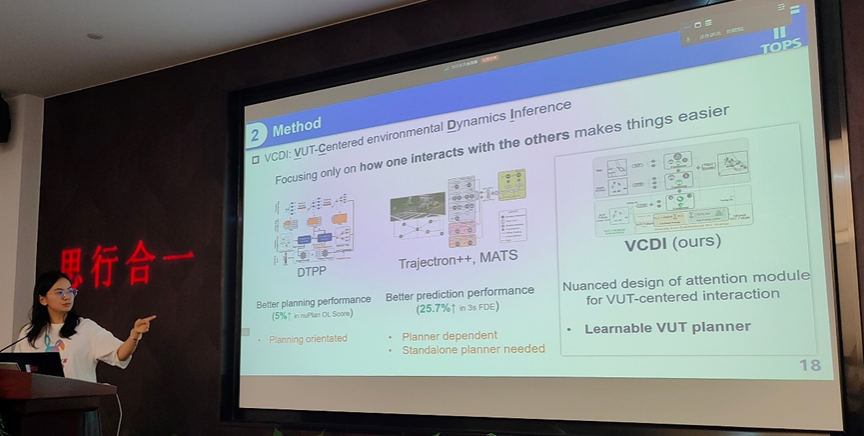
在研究方法部分,刘懿如同学重点讲解了基于VUT(Vehicle Under Test)为中心的交互式背景交通仿真模型(VCDI)。该模型通过构建交互关系,将背景车与被测车辆(VUT)之间的交互过程纳入仿真框架中。模型使用了基于历史轨迹和未来轨迹的交互行为建模方法,并引入了分布式策略规划器,能够动态调整背景车辆的行为,以应对不同的被测车辆行为。这种方法显著提升了背景车辆对被测车辆行为的响应能力,使得仿真环境中的交互性更为真实。
汇报内容
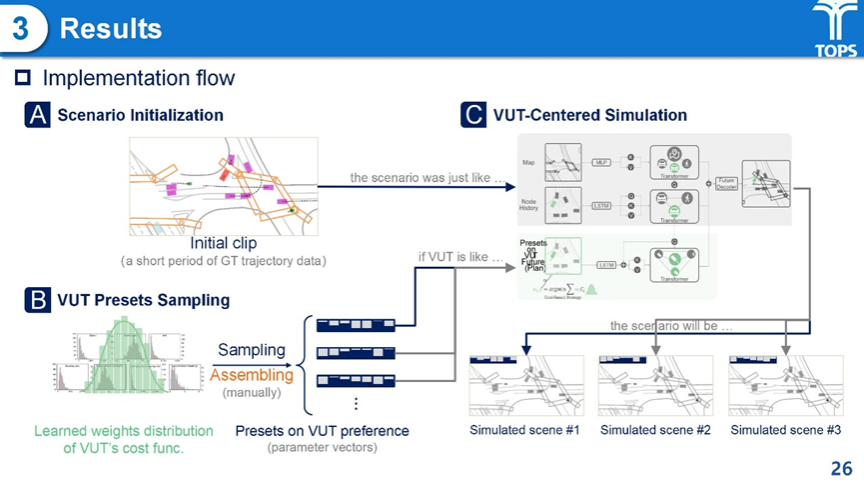
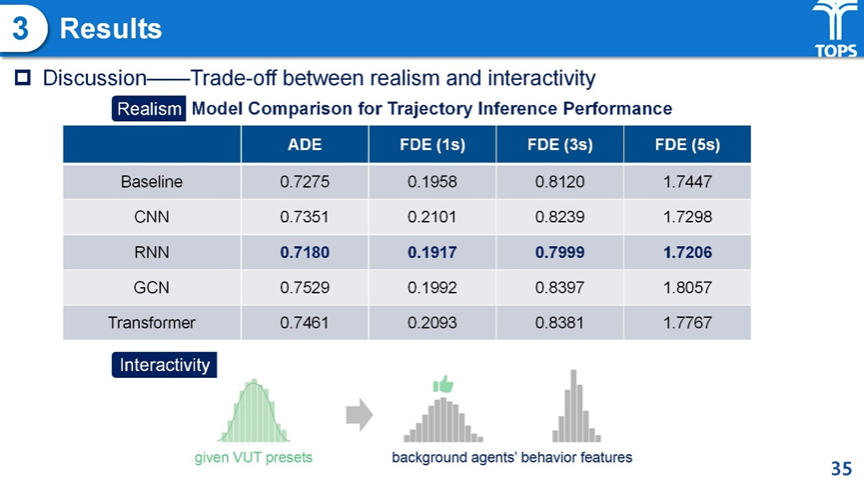
在实验结果部分,刘懿如同学展示了基于Waymo数据集的实验结果。实验表明,VCDI模型在不同场景下都展现出了较高的轨迹拟真度和交互性,与传统的背景交通仿真方法相比,能够更好地模拟真实世界中的多样化交通场景。特别是在复杂交叉口场景中,该模型通过调整被测车辆的策略偏好,能够生成多种背景车辆的响应行为,体现了其在多样性和交互性方面的优势。此外,还讨论了不同模型在轨迹拟真度与交互性方面的表现侧重点。
汇报内容
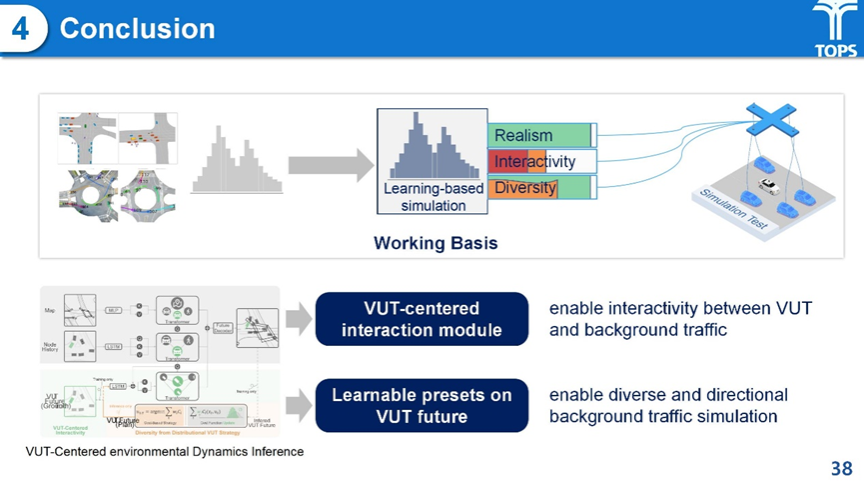
最后,刘懿如同学对这一研究进行总结。
汇报内容
在讨论环节中,参会的老师和同学们对该研究给予了积极的评价,并提出了一些建设性的建议。倪颖老师明确了研究的应用落点。田野老师强调区分真实性和交互性的重要性,建议将场景生成与世界模型概念整合。孙杰老师对技术路线和方法论的具体细节进行了进一步讨论,并指出了后续研究的优化方向。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}