2022年12月1日,TOPS课题组第118期组会于通达馆A436线上线下同时召开。本次组会邀请了香港科技大学的马骏博士为我们介绍自动驾驶运动规划的相关内容,讲座题目为《Alternating direction method of multipliers for motion planning in autonomous driving》。另外,21级博士生房世玉与大家交流讨论了《混驾无信号交叉口下网联自动驾驶汽车的协同式规划》的相关内容。课题组的所有老师和同学出席了本次组会。
马骏老师的讲座围绕自动驾驶车辆运动规划算法的设计展开,以提升自动驾驶车辆的效率和行驶安全性。传统的运动规划算法有基于搜索的方法、基于栅格的方法、基于优化的方法等。而常用的基于优化的运动问题的求解算法,如sequential quadratic programming等,存在求解速度慢、计算负担大等问题。因此,马骏博士提出了一种求解效率更高的交替方向乘法(ADMM算法)。为更好地解释ADMM算法,马骏老师首先介绍了iLQR算法,指出其具有高效处理非线性问题的优点,但同时也存在无法应对其他复杂约束的缺点。而将原本的优化问题拆解为含有系统动力学约束和其他约束的两个子问题,再利用ADMM算法即可求解。对iLQR和ADMM算法的求解原理和步骤,马骏老师也进行了详细的讲解。为验证ADMM算法的效率,设置静态障碍物避障场景、换道场景、超车场景进行仿真测试,测试结果表明加速度、转向角、安全距离均满足设定的约束条件。此外,将ADMM算法与IPOPT求解器等进行对比,发现ADMM在计算效率上有显著优势。马骏老师指出ADMM算法同样也可以解决多智能体的运动规划问题,并对算法步骤和仿真验证进行了详细介绍。

马骏博士汇报时刻
在问答环节,孙剑老师就算法的优化效果和鲁棒性进行了提问;田野老师就仿真实验场景中智能体的设置进行了提问;岳李圣飒老师就自动驾驶路径规划研究中技术路线的评价进行了提问;倪颖老师就仿真实验设计中如何考虑动态障碍物位置的更新进行了提问;聂通就非凸的ADMM问题的收敛性、超参数σ的设置等进行了提问。马骏老师对这些问题进行了耐心、细致的解答。
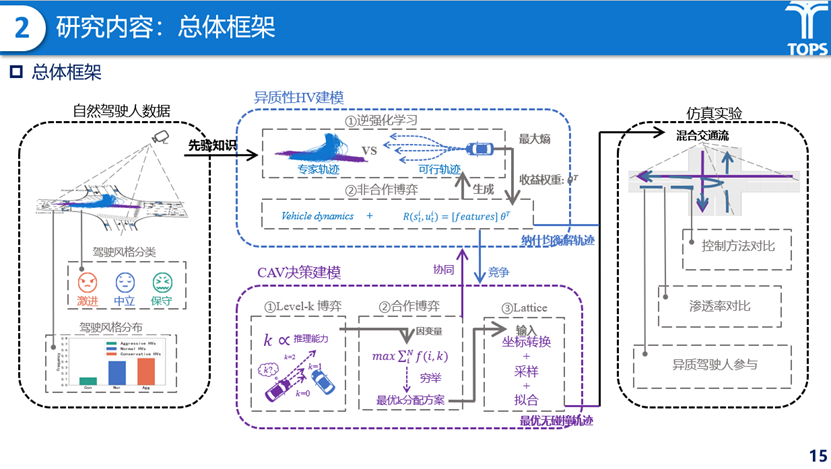
接下来,房世玉同学为大家带来《混驾无信号交叉口下网联自动驾驶汽车的协同式规划》的汇报。目前,网联自动驾驶在应用中仍存在决策过于保守、部分行为难以理解等问题。针对这些问题,房世玉从人-人(机)交互、机-机协同、人机混驾三方面进行了文献综述研究并重点聚焦于人机混驾领域。他指出,当前人机混驾研究存在高密度混驾环境研究空白、未引入异质驾驶人、交互关系建模单一等不足。为此,他提出一种协同策略CAV和异质性HV结合的高密度混驾下的协同方案。首先,他根据驾驶风格的不同对异质性人类驾驶员进行建模。其次,他基于Level-k博弈、合作博弈和Lattice规划器完成了CAV决策建模。在此基础上搭建仿真环境并进行实验验证,分别对比了不同流量、不同渗透率和引入异质性驾驶人后各控制策略的效果,验证了算法的有效性。最后,对未来研究进行了展望。
房世玉汇报时刻
在问答环节,刘佳琦就不同车辆之间通信延迟问题的应对方法及博弈问题多个均衡解之间的选择问题进行了提问;周东浩就实验场景的设计进行了提问;秦国阳博士就逆强化学习的参数设置问题进行了提问;倪颖老师就无信号交叉口HV让行规则在实验设计中的体现、实验验证中延误计算方法的合理性进行了提问;岳李圣飒老师就level-k如何与通行次序挂钩进行了提问;田野老师提出如果在多个均衡解之间选择总和最高的解可能会带来公平性问题,并从研究立足点等角度提出了建议;孙剑老师就异质性驾驶员建模部分聚类算法的合理性进行提问,并从汇报形式、研究创新点等角度提出了建议。
至此,本期组会圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}