2022年7月14日,TOPS课题组第112期组会于线上召开。作为2022年上半学年的最后一次例会,本期组会有幸邀请到2020级博士研究生赵晓聪向大家分享《自动驾驶规控算法》的相关内容以及参加CommonRoad竞赛经历的收获。
CommonRoad自动驾驶运动规划竞赛是由iVEX资助,慕尼黑工业大学(TUM)主办的一项国际自动驾驶赛事。赛事的主要内容是设计适应于复杂交互场景的自动驾驶规划决策算法。2021年以来,在两届比赛中吸引了众多国内外知名高校的队伍,而课题组成员赵晓聪及其团队在比赛中获得冠军。

赵晓聪及其团队在CommonRoad竞赛中荣获冠军
赵晓聪从问题拆解入手对本次会议的主要内容进行介绍,将自动驾驶规控任务分为战略层、战术层、操作层三个部分;将场景拆解为冲突区、非冲突区两个方面,分别求解。针对非冲突区的语义决策,使用蒙特卡洛树搜索的方法求解;而对于相对复杂的冲突区语义决策则采用虚拟博弈寻优。
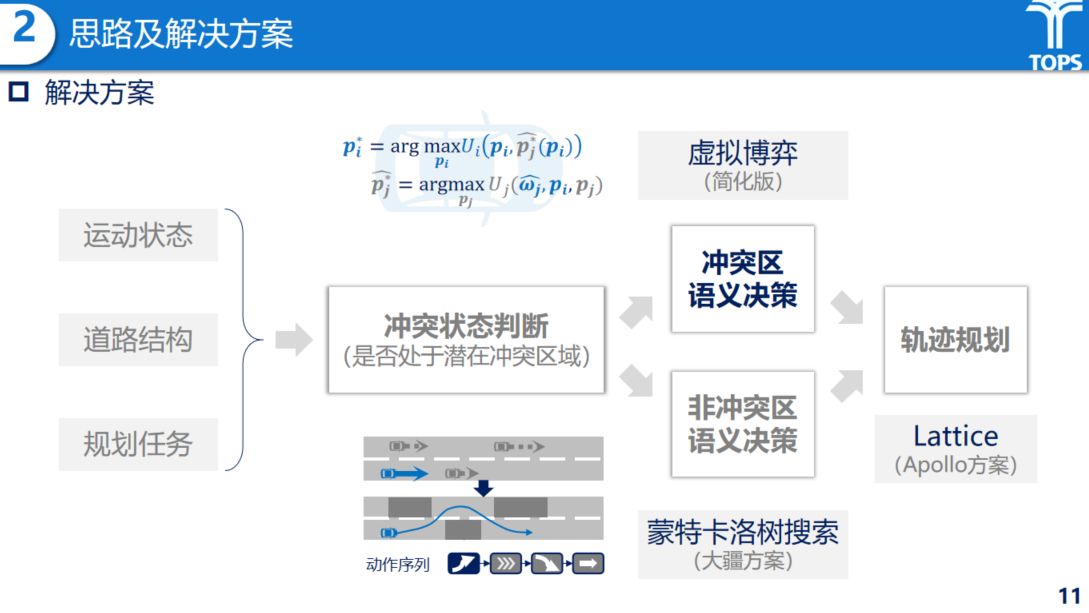
问题拆解与分部求解
最终,将语义层的输出作为Lattice规划器的输入。赵晓聪将Lattice规划器的主要工作流程分为轨迹采样、损失函数计算、轨迹选优、输出等几个部分并逐步进行了详细的介绍。最后,赵晓聪还总结了这次参赛经历的收获并开源了相关资源供大家学习参考。

Lattice规划器工作流程
交流讨论环节,众多老师和同门都对赵晓聪的工作表达了浓厚的兴趣,田野老师和杭鹏老师表达了对CommonRoad竞赛中评价体系和其他主流算法的好奇。同时岳李圣飒老师和杭鹏老师还就背景交通流中车辆的自主换道和换道风格问题与赵晓聪进行了交流。刘懿如师姐与秦国阳师兄则表达了对规划器中损失函数设计的兴趣,结合对强化学习的理解,与赵晓聪交流了其中的异同。
讨论环节结束后,孙剑教授还对目前仍在学校的课题组同学们的情况逐个进行了解。至此,TOPS第112期组会圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}