2022年6月2日星期四,TOPS课题组第110期组会于线上顺利召开。本期组会有幸邀请到杭鹏老师与大家交流讨论《网联自动驾驶协同决策与主动安全控制》的相关内容。
杭鹏老师主要介绍了其在博士及博士后期间,围绕自动驾驶,自动驾驶决策以及控制相关的一些工作,从拟人化自动驾驶、网联自动驾驶协同决策、极端工况主动安全控制以及结论与展望四个方面进行了分享。
在第一部分拟人化自动驾驶中,杭老师介绍了拟人化自动驾驶架构中的几个主要模块,包括决策模块、规划模块、控制模块,以及一些显著提高算法性能的辅助模块:驾驶激进性估计模块、碰撞风险评估模块等。
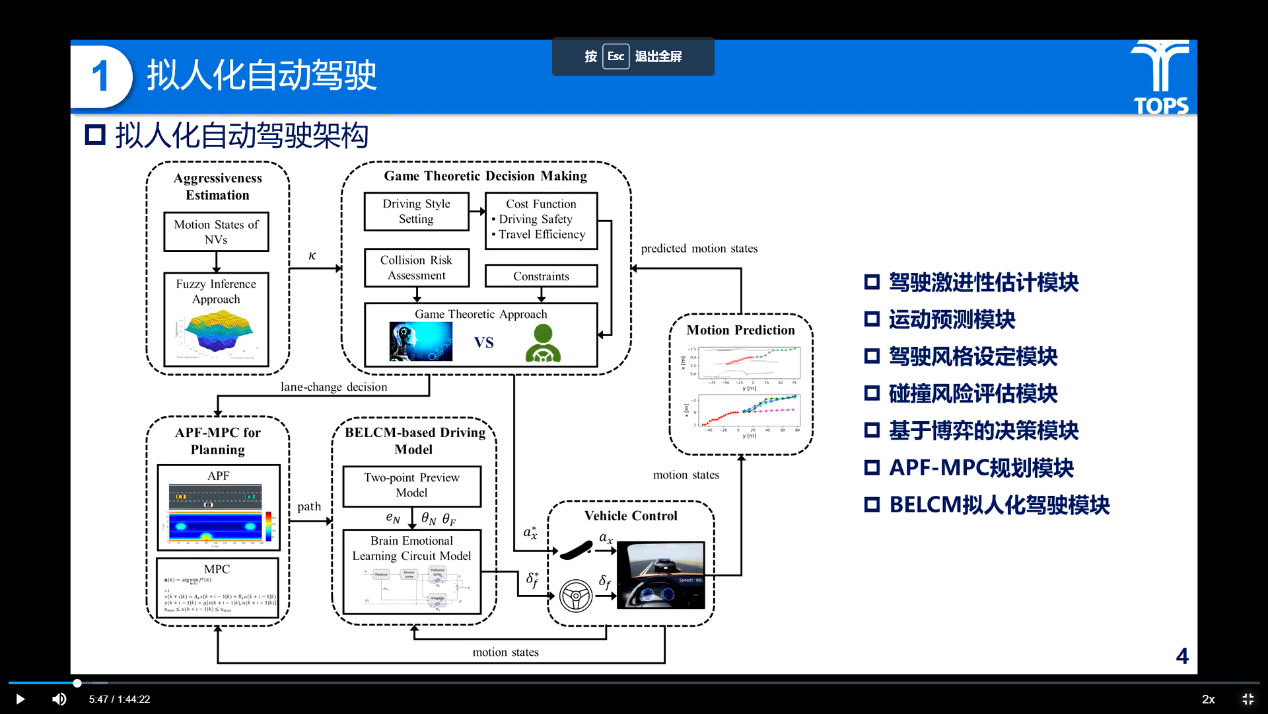
图1 拟人化自动驾驶架构
在驾驶激进性估计模块中,实现了对周围人类驾驶员的驾驶激进性的评估识别,在设计决策模块时,考虑驾驶激进性因素,从而提高决策的安全性。在第二个模块中设计了一个考虑驾驶风格的决策模块,会给自动驾驶汽车赋予不同的驾驶风格,在决策的时候能够体现个性化以及拟人化的性能。在碰撞风险评估模块中双重保障决策的安全性,同时设计交互事件触发器,从而提高决策算法的计算效率。在规划模块中,使用比较常见的APF-MPC的方法来实现,同时设计了基于人类大脑情感学习回路的拟人化两点预瞄模型。随后杭鹏老师还介绍了设计的人类驾驶员与AV交互决策试验的主要思路及实验结果。

图2 人类驾驶员与AV交互与决策试验
在网联自动驾驶协同决策部分中,杭鹏老师介绍了针对城市道路交叉口、高速公路匝道汇等典型冲突场景做的一些协同决策相关的工作。针对高速公路匝道汇入、换道以及城市道路环岛的场景设计了一个基于联盟博弈汇流任务协作框架。框架创新点在于赋予了协作车辆不同的驾驶风格,并且将联盟博弈应用于车辆协作。在无信号灯交叉口的车辆协同决策中,设计两个模糊联盟,单车以及其所属的联盟分别在所处的模糊联盟以及整个交通系统组成的模糊联盟中拥有一个参与度。最后,杭老师对未来在行动决策的技术难点及挑战进行了总结。
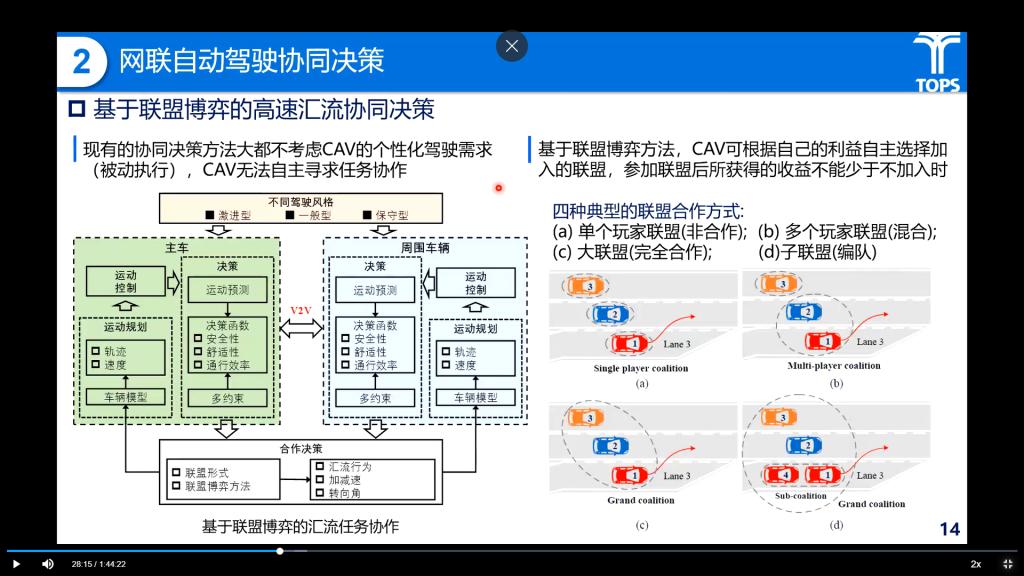
图3 基于联盟博弈的高速汇流协同决策
随后,杭鹏老师还跟大家分享了极端工况主动安全控制的相关内容,具体包括系统不确定性的鲁棒控制问题、外部扰动抑制控制问题以及系统稳定性控制问题等。另外杭老师还介绍了在博士期间制造的一辆四轮独立线控,四轮独立转向的一个电动汽车的平台。

图4 4WIS-4WID电动汽车
最后杭老师对今天的分享内容进行了总结并提出了今后的研究展望。
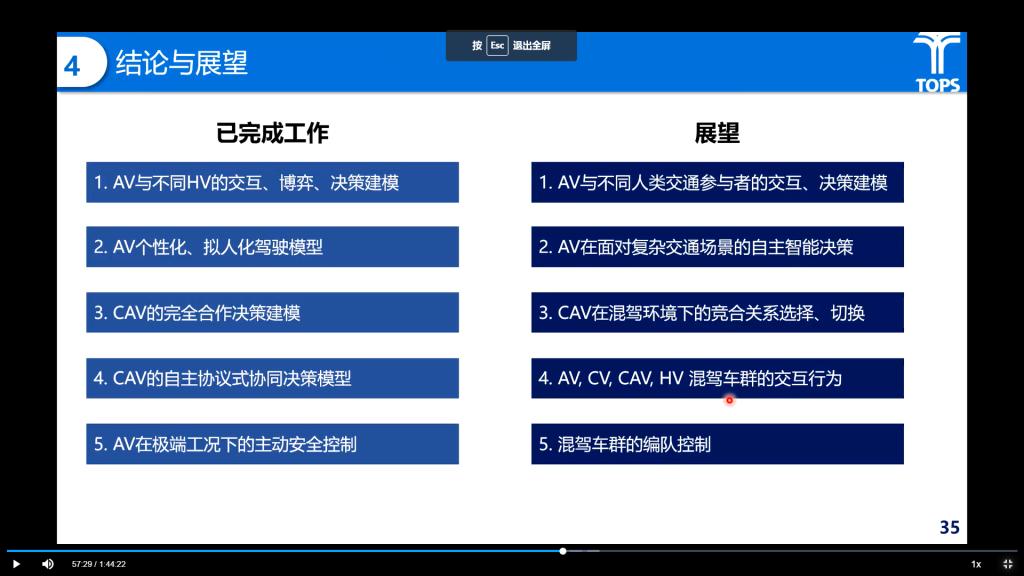
图5 结论与展望
在交流讨论环节中,孙剑教授首先对杭老师加入TOPS大家庭表示了热烈欢迎,随后提出杭老师的分享是非常系统全面的,我们从车辆的角度考虑极限控制是非常重要的,迫切需要一个跨学科的老师带领,使自动驾驶在混驾环境中的交互更加真实。随后赵晓聪师兄就决策模块中具体的决策内容提出疑问并与杭鹏老师交流讨论。孙剑教授就对自动驾驶拟人化中风格划分以及背后的驱动方法提出疑问并进行了交流讨论,认为未来对混驾环境中的多个AV与HV交互的研究仍然是任重道远。张铎师兄就风格划分以及轨迹相似度评价方法提出疑问并与杭鹏老师进行了探讨。倪颖老师与杭鹏老师探讨交流了非机动车驾驶员决策过程与机动车驾驶决策的区别。岳李圣飒老师就AV车辆间交互的方法论与杭老师进行了交流讨论。田野老师与杭老师交流分享了聆听之后认为可以做后续研究的三个idea。
本期组会中,杭老师的精彩报告让大家都受益匪浅,在交流讨论中也迸发出许多研究的灵感火花。至此TOPS课题组110期组会圆满落幕,再次热烈欢迎杭鹏老师加入TOPS课题组这个大家庭!
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}