2020年5月21日18:00,TOPS课题组第76期组会在线上顺利召开。本次组会由17级硕士生周东浩与大家交流讨论《智能汽车交叉口处左转预期协作运动规划》的相关内容。参会人员包括孙剑教授、倪颖副教授、田野副研究员和课题组全体成员。
在交叉口左转场景中,各对象交互行为复杂,智能车在左转时,行为往往过于保守,造成了一系列问题。在这种场景下,主讲人周东浩提出了预期协作运动规划的理念。一般的协作运动规划,车与车之间的策略是互相沟通的,本车可以根据周围车的策略做出反应;而预期协作运动规划,本车不知道本车之外的其他车的策略,只能尽可能方便周围车,做出一些可能得到对方协作响应的动作。周东浩希望在实现智能车的运动规划的同时,探究智能车与冲突车相互协作的可能性。
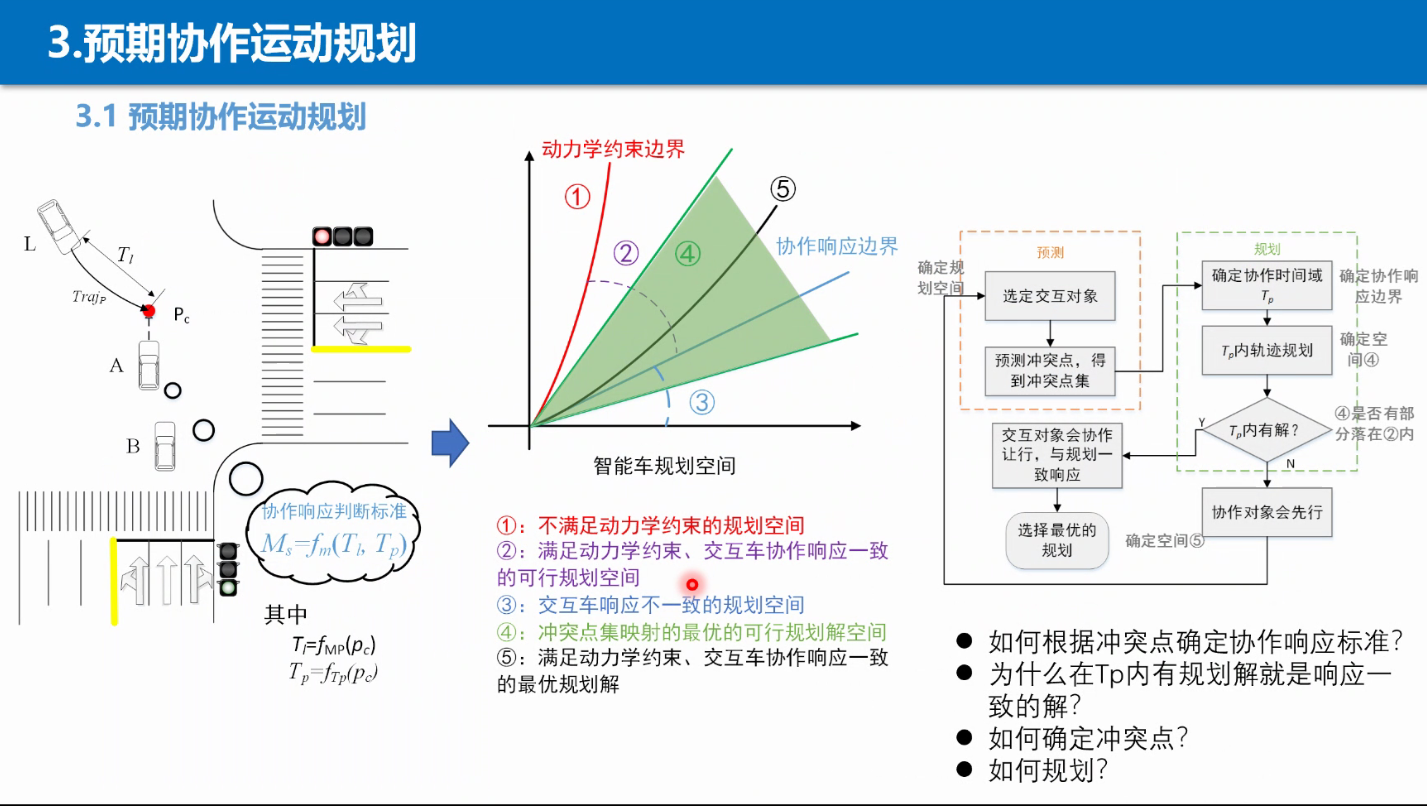
协作运动规划存在三大难点:预测-规划因果困境,多对象行为的一致性,交互对象交互策略无法检测。在经过详细的文献综述之后,周东浩提出了具体的技术路线。 在这一技术路线中,存在几大难点:1.如何根据冲突点确定协作响应标准?2.如何确定冲突点?3.如何根据冲突点进行运动规划?周东浩利用不同的方法解决了这些问题。
对于协作响应标准这一问题,周东浩利用协作加速度作为判据,并利用实证数据证实了协作加速度这一判据的可行性,并对协作加速度的阈值进行了确定。对于确定冲突点这一问题,周东浩利用多维高斯混合分布,按照两种不同的情况,学习了人类驾驶员的冲突点分布,并据此进行采样。对于根据冲突点进行运动规划这一问题,东浩分别利用四阶贝塞尔曲线与五次多项式拟合轨迹与速度,并通过求解最优化问题,求解了未知参数。 周东浩利用仿真验证的方法,从冲突点预测结果、预期协作的实际效果、策略变化、速度变化、效率等等方面,评估了算法的效果。结果显示,本研究所提出的方法效果良好,能够部分实现预期协作运动规划的目标。
在讨论阶段,刘启远博士对本研究是否是多交互问题提出了疑问,提出本研究所采用的协作响应标准可能不够准确,并提出了相关建议。张赫与主讲人探讨了高斯混合分布在应用中可能存在的问题。田老师提出本研究的方法可能无法克服基于行为方法的缺点,难以描述不确定性,并且在复杂的交通场景下难以适应,复杂度指数增长。田老师还提到,本研究假设人的行为都是协同的,但这一假设在现实生活中不一定成立。孙老师希望能够将智能车轨迹规划的理论方法放入仿真中,即每个车都按照智能车的控制逻辑控制,从单车控制变为交通流仿真,希望能够探究这一想法的可行性以及其中存在的难点。孙老师还提出一些表现形式方面的建议,比如讲解所使用的图片不够常规,直接看图难以理解等等。
会议最后,各位老师对同学们提出的生活中的问题进行了解答,比如大家关心的返校问题等等。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}