2021年10月14日,TOPS课题组第98期组会在通达馆A436线上线同时召开。本期组会有21级博士房世玉、21级硕士唐揽月及21级硕士张育林依次和大家交流讨论了《结合跟驰模型的Pooling-LSTM神经网络轨迹预测》、《基于并行计算的微观交通仿真模型标定》和《混行场景下机非交互行为特征分析》。参会人员包括倪颖副教授、田野副教授及课题组全体同学。
房世玉的汇报围绕其毕业设计课题《结合跟驰模型的Pooling-LSTM神经网络轨迹预测》展开。基于自动驾驶车辆的发展对车辆的规划决策提出越来越高的要求,需要运用科学有效的方法对车辆轨迹进行预测的研究背,提出了运用机器学习中具有代表性的神经网络算法进行轨迹预测。在创新型方面,该研究采用了跟驰模型作为知识驱动模型和神经网络作为数据驱动模型相结合的形式来解决长时精度预测精度不高的问题。此外,本研究还通过池化层来提取周边车辆的数据特征来提高预测精度,最后通过对比实验的方法验证了使用池化层处理周边车辆数据可以减少轨迹预测的横向误差,引入以跟驰模型为代表的知识驱动模型,将跟驰模型的输出值作为神经网络的输入,结合知识驱动模型与数据驱动模型的形式能进一步减少轨迹预测的纵向误差。
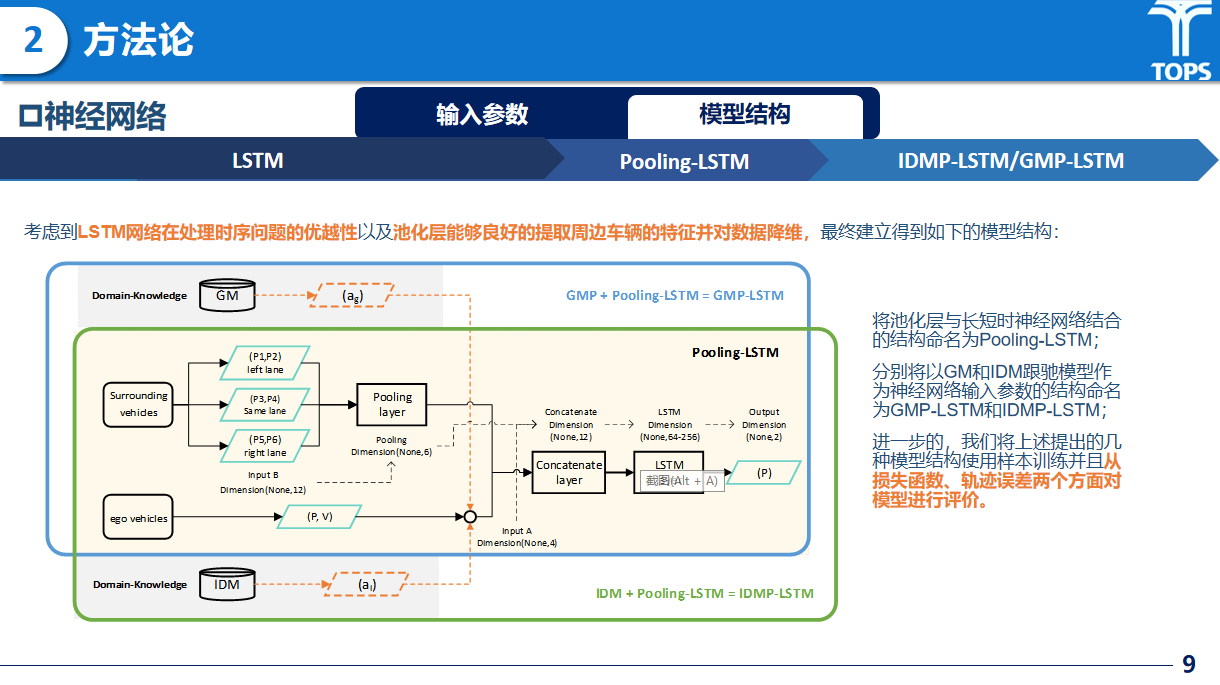
方法论
唐揽月的汇报就其毕业设计课题《基于并行计算的微观交通仿真模型标定》进行。基于微观交通仿真需要参数标定的前提,而启发式算法在参数发生改变情况下进行标定的时间消耗较大需要进行加速的研究背景下,该研究按照并行框架选择、计算瓶颈识别和负载均衡设计三个步骤,设计并实现GA和PSO的并行化,实现了基于并行计算进行微观交通流仿真的参数标定。在研究过程中,还通过建立高密度交通流的SUMO仿真模型来验证标定算法的准确性,最后还从标定计算时间和可扩展性对两种标定算法的并行计算性能进行的评估和比较。通过上述的研究方法,最后得出了并行计算能够大大加快标定速度,并行PSO的可扩展性优于并行GA算法的研究结论。
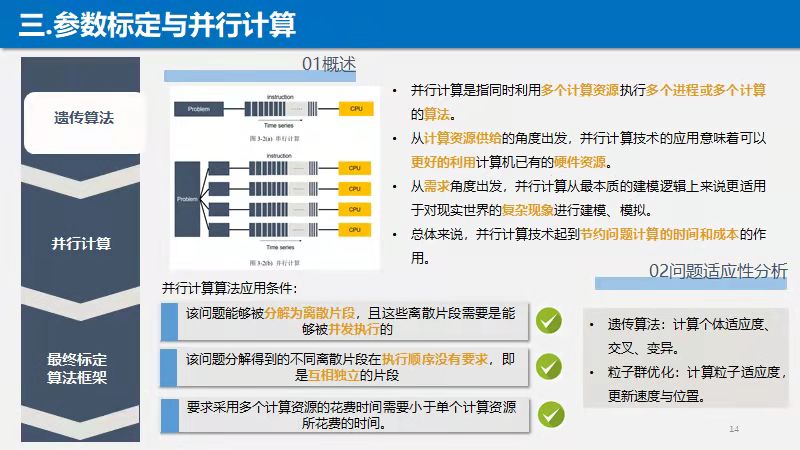
参数标定与并行计算
张育林的汇报为《混行场景下机非交互行为特征分析》。该研究基于非机动车使用量大,机非混行路段冲突较为严重,道路安全性问题突出,非机动车越线行为建模和机非交互行为机理的研究不充分的研究现状。该研究通过实地采集视频数据进行了标线隔离路段机非交互轨迹数据的提取,进行了机非交互类型的分类,根据机非交互类型特征建立了机非交互方式选择模型并且解释了变量与交互类型之间的关系,最后通过交互过程中的参数变化趋势分析了交互类型的行为模式特征。最后还提出了轨迹数据量较少,交互行为类型的分析不够全面,需要更为深入研究交互的深层机理和过程的不足之处和展望。

汇报环节
在交流环节中,针对房世玉的课题,倪颖副教授提出论文应该按讲故事的方式展开,不要过多强调方法论部分,应该有完整的研究背景和意义。张小卉提出除了简单的会使用模型方法以外,更深层的挖掘方法的数学机理,有助于提升理解,更好的解释结果现象。李建强提出文章的中心如果放在跟驰模型所代表的领悟知识,可能会比重心放在机器学习方法上更好,从交通领域出发,发挥专业所学。田野副教授提出要加强英语写作,文章按照八股文的形式展开,具备相应的动作。
对于唐揽月的课题,张小卉对并行计算的的缺点及适用性提出了自己的疑问。赵晓聪对于并行计算加快标定速度的必要性提出了问题,并且对于仿真模型参数调整的需求及标定方法对于精度的影响提出了疑问。付全路对于并行计算在仿真过程中的计算流程提出了疑问,并且对于仿真标定方法在不同仿真环境中的可移植性提出了见解。田野副教授对于该项技术在本身就可以利用多核的仿真平台的应用提出了质疑。
针对张育林的课题汇报,倪颖副教授对于交互行为研究的深入性提出了批评,对于模型建立选取的合理性提出了质疑,对于研究的目的性提出了需要更为明确的思考的建议。赵晓聪对于交互行为建模从博弈论的角度提出了建议,提出了需要从数据观察的角度系统学习交互行为建模的方法。田野副教授对于研究课题的实际工程意义、能解决的实际问题提出了建议,建议可以通过对交互行为的深度解析研究道路应用软硬隔离的必要性,量化软硬隔离应用对于交通流效率或者安全的重要影响。
最近更新:2021年11月6日 13:23:36
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}