2021年10月28日,TOPS课题组第99期组会在通达馆A436线下线上同时召开。本期组会由21级硕士生傅澳晖、21级博士生黄䶮和19级硕士生蒙艺玮依次分别和大家交流讨论《基于Lg SVL的自动驾驶仿真场景测试》、《人工驾驶与自动驾驶混行环境下的宏观基本图研究》和《基于Unity 3D开发交通基础仿真模型》。参会人员包括孙剑教授、田野副教授以及课题组全体同学。
傅澳晖的汇报围绕其近期的研究《基于Lg SVL的自动驾驶仿真场景测试》展开。在高等级自动驾驶汽车(HAV)已经步入测试和应用环节的背景下,存在公开道路测试场景随机、高风险场景概率小等造成超长测试周期的难题,在此基础上,虚拟测试的可控、可定制性可以有效解决HAV公开道路测试的超长周期测试的难题。通过将Lg SVL仿真平台与Apollo 6.0规控器进行桥接,可实现在SVL云平台完成仿真参数设置并运行联合仿真。在Unity编辑器构建高精度地图用于仿真,使用自适应搜索测试方法快速寻找有测试价值的场景。结果表明,在三维跟驰场景下,以Apollo为规控器的仿真测试中,在500次场景搜索迭代中,找到了 352个碰撞场景。最后,傅澳晖提到CPU和GPU负荷过高,卡顿降频导致Cyber_RT自动断开桥接,仿真无法持续连续进行等问题,并将在未来解决以上问题。

仿真平台与规控器桥接
黄䶮的汇报围绕其本科毕业设计《人工驾驶与自动驾驶混行环境下的宏观基本图研究》展开。未来人工驾驶与自动驾驶混行环境将成为交通要素的主要组成部分,混行环境将对宏观交通产生何种影响成为目前的热点问题。研究基于SUMO微观仿真平台,搭建北京国家体育场及其周边大规模路网的仿真模型;通过二次开发重建自动驾驶车辆的跟驰模型,使用遗传算法对OpenACC和Waymo公开数据集进行IDM跟驰模型参数标定;设置四类仿真实验,进一步探索AV渗透率及车辆构成对宏观基本图的影响情况。结果表明,以OpenACC和Waymo为代表的自动驾驶车辆较为保守,随着自动驾驶级别和自动驾驶渗透率的提高,临界车辆数、堵塞车辆数减少,路网承载力提高,但提升离理想情况差距较大。当路网交通趋于过饱和时,以OpenACC和Waymo为代表的自动驾驶车辆可能会使路网更易陷入“死锁”状态。
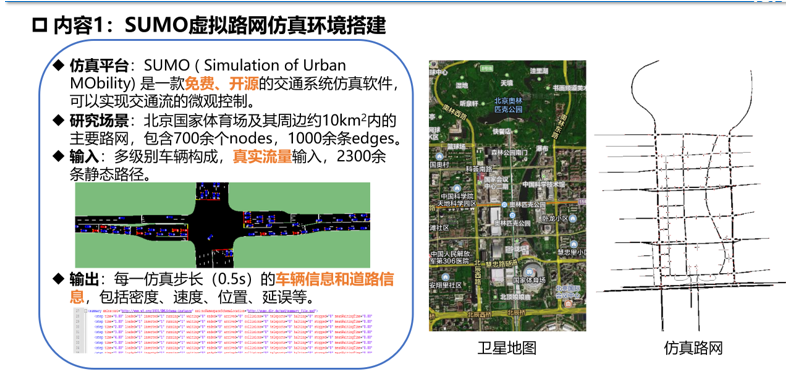
仿真路网
蒙艺玮为大家带来《基于Unity 3D开发交通基础仿真模型》的小讲堂。讲堂首先介绍了交通仿真系统的组成要素,主要包括道路、车辆和仿真控制,然后重点介绍了Unity3D游戏引擎及其操作入门。Unity基本元素包括场景、摄像头、游戏对象、组件和脚本,蒙艺玮向大家操作展示了如何搭建并运行一个简单的交通仿真。
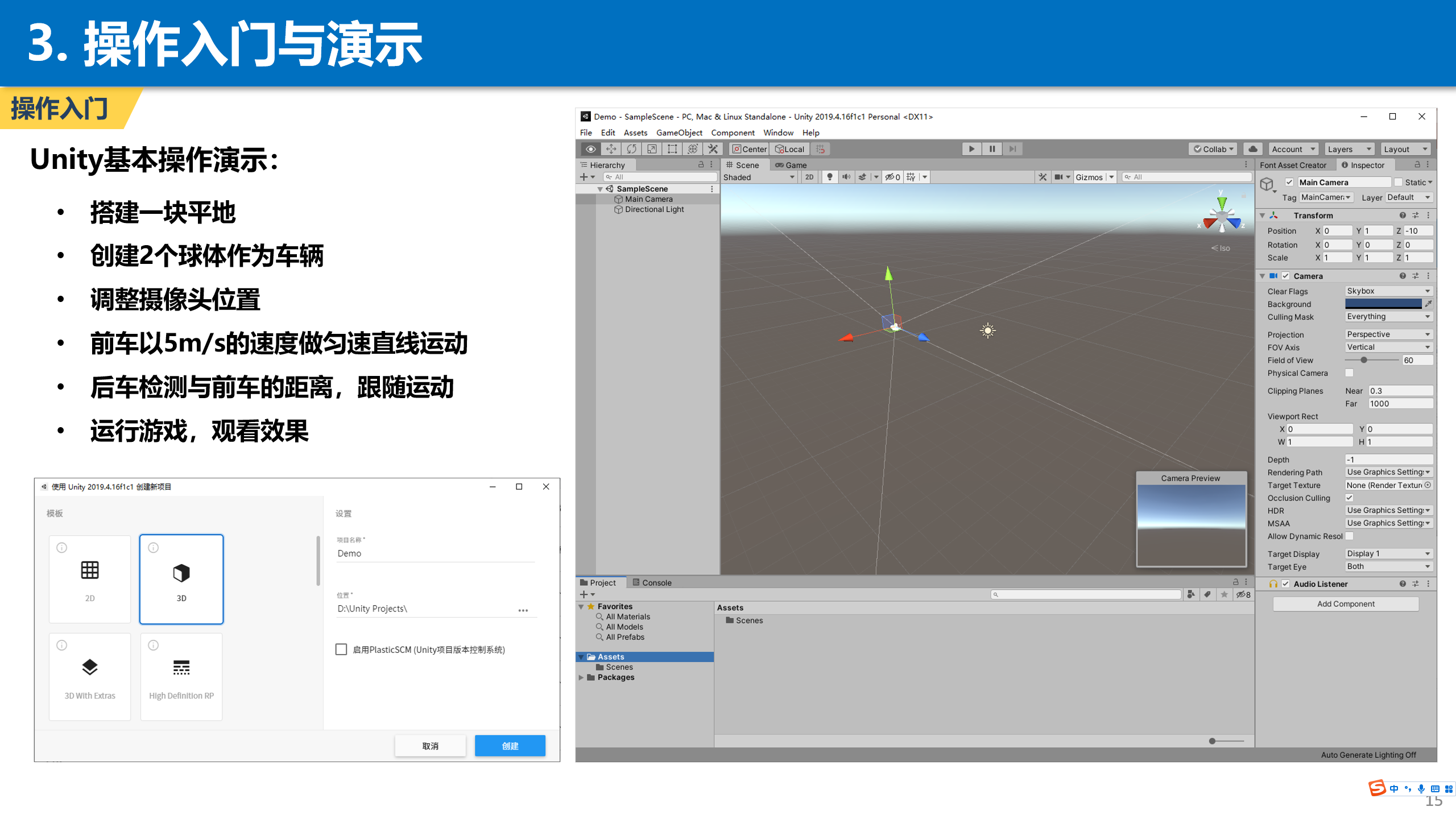
Unity基本操作演示
在交流环节中,针对傅澳晖的研究和汇报,孙剑教授提出,后续的研究需着眼于测试方法上的创新,此外通过测试得到不同规控器之间的差异性,分析差异产生的原因,证明测试方法应用于自动驾驶框架的有效性。针对测试方法的改进,需重点研究虚拟自然仿真环境下是否能够自适应地去找到更多的功能场景,而不仅仅是局限于逻辑场景。赵晓聪对主车与NPC之间的交互提出了疑问,建议能够针对NPC的行为模型去构建交互性。张赫提出,针对遍历测试成本很高的问题,需要针对测试方法进行进一步的改进,想方法提高测试效率,使仿真场景的测试做到又快又准又全。
针对黄䶮的汇报,孙剑教授提出本项研究还可以在模型上进行拓展,如换道模型等,PPT的一些表述还不够清晰,在PPT的背景描述、逻辑结构等方面还需要下工夫。胡祥旺对本项研究的细节部分进行了提问。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}