虚实融合自动驾驶测试平台:
依托同济大学智能网联汽车测试基地,构建虚实融合测试环境,实现自动驾驶实车与“驾驶模拟器-智能目标物-虚拟交通流”三相交通流的实时交互。人类驾驶员在驾驶模拟器上驾驶背景车辆,相应的状态位置信息将实时传递给虚拟仿真交通流或智能目标物执行。同时,驾驶模拟器也将实时接收和渲染自动驾驶实车(被测物)与其他交通参与者的状态位置信息。基于先进的5G通讯技术,实现低时延传输,支持被测自动驾驶车辆与“三相”背景交通流的实时双向交互效果,适用于强交互、高风险、类人性驾驶环境测试需求。相较于纯实车封闭场地测试,风险场景测试数量提升百倍,测试认证效率可达20倍,支持了首届Onsite自动驾驶实车挑战赛。
虚实融合测试平台单车测试
虚实融合测试平台多车协同测试
第一届onsite实车挑战赛复杂场景测试
自动驾驶人机交互测试平台
平台以“人在环内、虚实融合”为核心特征,涵盖整车台架与封闭测试场两大真实车辆在环环境,实现从自动驾驶功能交互,到认知交互,再到智能交互的测评和优化,支撑认知状态评估、人机共驾接管、人机共融智能增强与紧急控车等关键研究目标的实现。
整车在环平台:环境仿真系统为核心驱动,通过场景注入系统将定制化的虚实融合测试场景(包括高保真交通流和实验任务)同步分发至各子系统,并由数据采集系统实现全流程数据同步与闭环反馈。台架系统通过模拟路面激励和车辆动力学,为整车座舱系统中的驾驶员提供真实体感反馈;座舱系统开放人机交互与认知数据接口,实时监测驾驶员状态。同时,自动驾驶系统通过开放的感知-规划-控制接口接入虚拟或真实环境,实现算法验证与决策数据流通。

人机交互平台架构
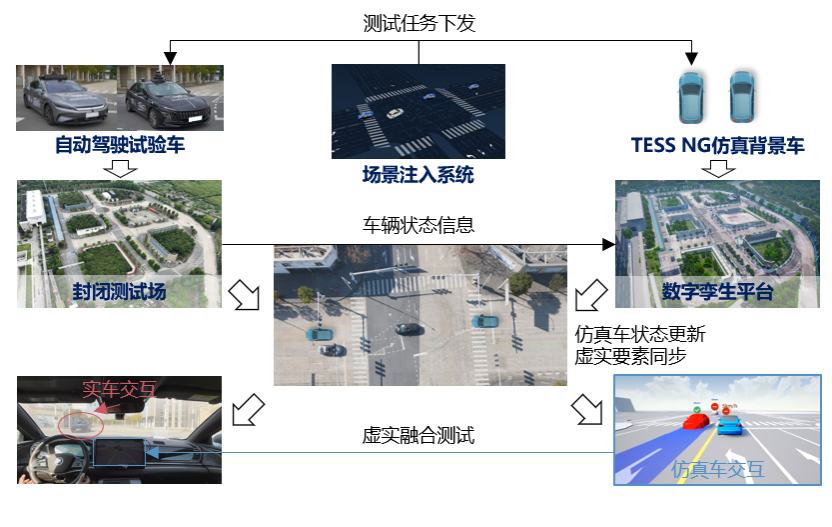
封闭测试场平台:数字孪生平台生成包含动态与静态要素的虚拟场景,并通过场景注入系统将虚拟元素(如交通流、障碍物)同步映射至真实测试环境中;实时获取试验车的状态信息,反馈至孪生平台,实现虚实要素的动态交互与闭环更新。测试任务下发后,自动驾驶算法在实车中运行,人类驾驶员在车内既可感知真实场地环境,又可与注入的虚拟要素互动,形成高真实度的混合测试环境。整个流程在保证实验安全(如限制主车操作)的前提下,实现了可控、可复现的自动驾驶人机交互验证。
测试场实车交互实验组织架构
整车台架人机交互实验
紧急接管人机交互测试
基于cave的多体交互实验平台:
基于CAVE的多体在环交互实验平台深度融合可交互四面投影CAVE系统、高精度动作捕捉系统、多模态生理采集设备及VR沉浸系统,构建了人-车-环境深度融合的元宇宙交通环境,通过同步采集多交通参与者的行为轨迹、眼动数据、生理响应及运动姿态,可实现行人、非机动车骑行者与自动驾驶车辆间的实时多体交互与闭环反馈。依托该平台,已开展外部人机交互界面eHMI的设计与优化。通过接入虚拟自动驾驶车辆及多样化eHMI交互方案,实时量化分析eHMI信号对行人、非机动车驾驶人行为决策与信任度的影响,并基于行为-生理多维反馈进行交互策略迭代。eHMI测试过程支持动态场景重构与多体响应联动,实现多体在环测试与优化。

同济大学测试车虚实融合渲染效果
CAVE多体交互测试
阅读() 最近更新:2025年09月09日 18:53:57
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}