2025年4月27日,TOPS第161期组会于通达馆A211线下举行。本次组会由22级硕士郑文涛、赵东虎、王思涵、蔡依林、杨宇豪进行研究成果汇报。课题组全体老师同学出席了本次组会。

汇报时刻
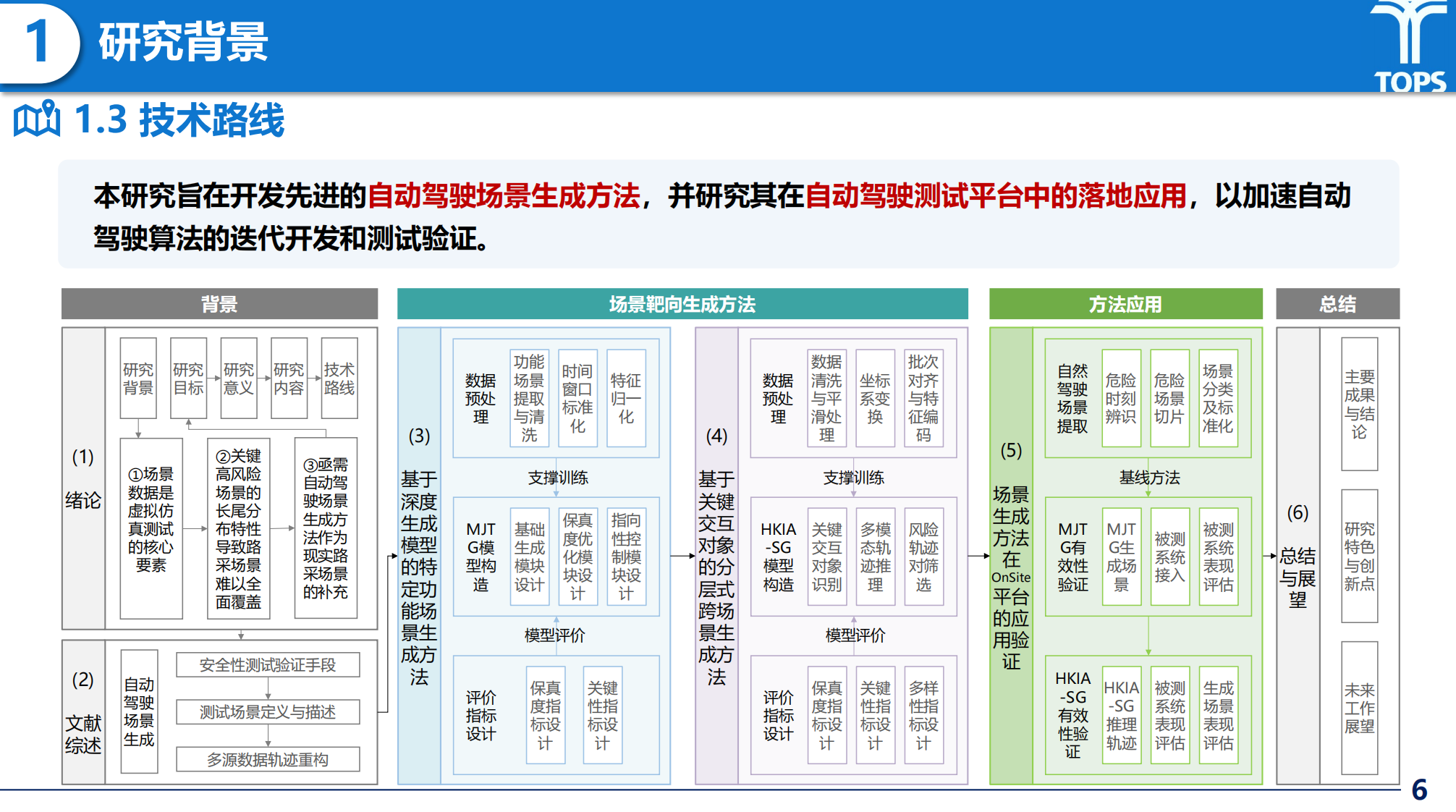
郑文涛同学介绍了关于自动驾驶安全性测评中场景靶向生成方法的研究进展。此次汇报主要从研究背景、基于深度生成模型的特定功能场景生成方法、基于关键交互对象的分层式跨场景生成方法以及这些方法在OnSite平台的应用验证四个方面进行了阐述。
研究内容
郑文涛同学指出当前自动驾驶技术面临的挑战,尤其是在复杂交通环境下的规划决策问题。他强调了开发新方法以补充现实路采场景的重要性,从而确保自动驾驶汽车能够应对多样化的驾驶环境。本研究介绍了一种名为MJTG的多车轨迹联合生成方法。该方法结合VAE和WGAN框架,提高了轨迹拟合度及可行性,相较于其他方法具有显著优势。

研究内容
最后,该研究展示了这些方法在OnSite平台的应用,包括自然驾驶场景提取、危险时刻辨识及场景分类等。他特别提到了使用改进的风险度量指标来识别潜在危险场景的有效性。
针对郑文涛同学的汇报,老师们纷纷提出了一些宝贵的建议。孙剑老师建议调整题目以更准确地反映研究的核心内容,并强调需要梳理论文各部分间的逻辑关系以增强连贯性。倪颖老师提出应明确定义“关键场景”的概念,石皓天老师则建议引入数学模型来明确输入输出,使问题定义更加清晰。孙杰老师指出危险性和多样性两章之间缺乏联系,建议加强这两部分内容的相关性。这些反馈为郑文涛同学后续研究提供了重要的指导方向。
接着赵东虎同学展示了其关于人机混驾环境下基于外部人机交互界面(eHMI)的自动驾驶车辆(AV)增强交互策略的研究成果。该研究旨在通过优化eHMI的显示时机和内容,解决自动驾驶车辆与人类驾驶员之间的意图误解问题,从而提升道路安全性和交通效率。
赵东虎同学首先介绍了研究背景,强调了当前自动驾驶技术在复杂的人机混驾环境中面临的挑战。由于AV驾驶意图难以被人类驾驶员准确理解,导致了大量的交通事故。为此,他提出了一种需求响应式的eHMI触发机制,利用动态贝叶斯网络模型量化驾驶人的意图不确定性,并优化eHMI的显示时机和内容。此外,他还详细阐述了实验设计,包括如何通过仿真环境验证所提出的交互策略的有效性。

研究内容
老师们也对此研究做出了点评。孙剑老师建议赵东虎进一步明确研究背景中的具体交互问题,并详细解释研究背景部分中当前交互存在的问题以及为什么这些问题需要解决。其他老师则建议在模拟背景车行为时,避免使用假设的方法,而是采用参数标定模型来更真实地模拟人类驾驶行为。这些建议为赵东虎后续的研究提供了重要的指导方向,帮助他在现有基础上进一步完善和优化其研究成果。
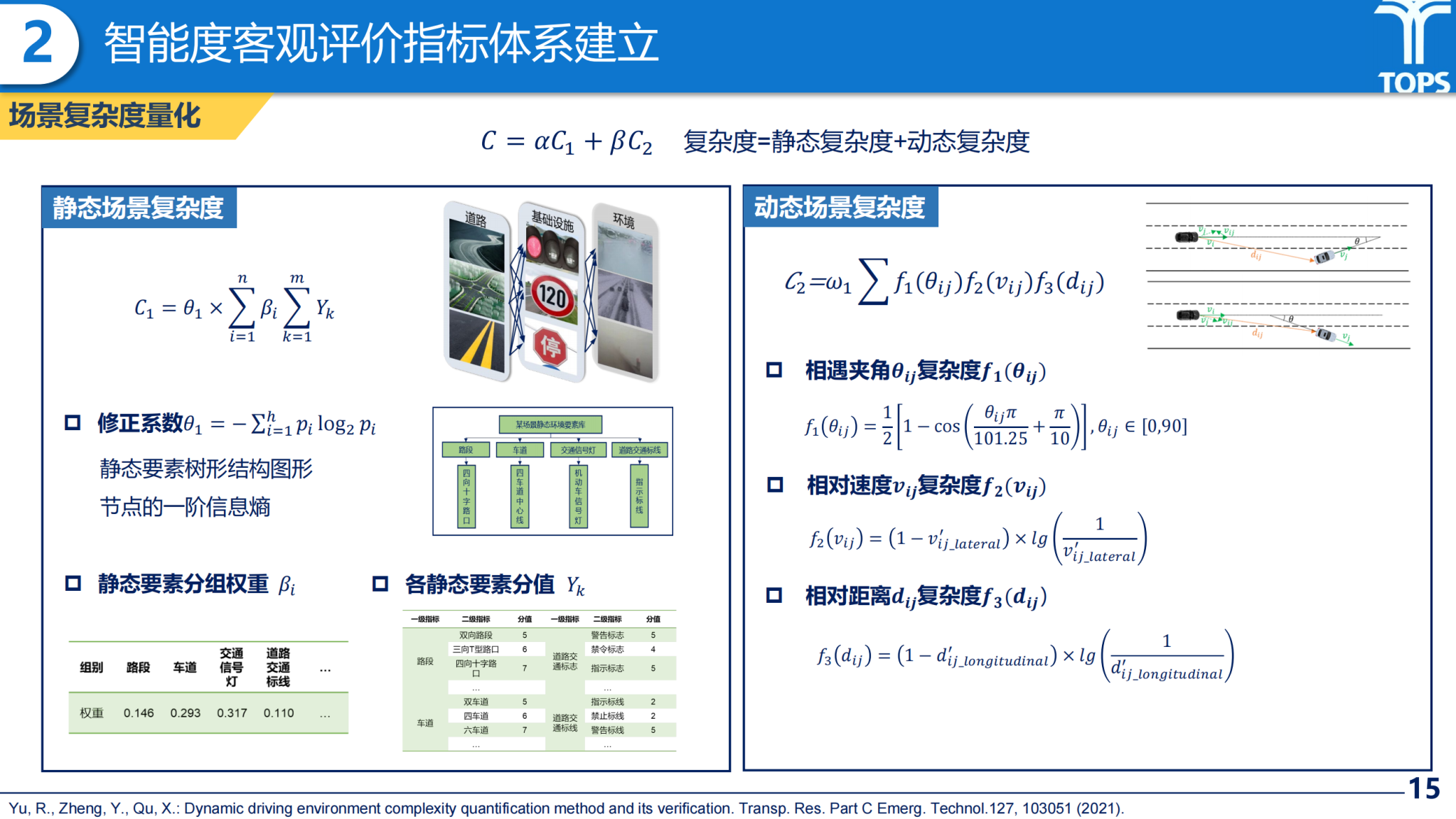
王思涵同学展示了其关于基于主客观映射模型的自动驾驶车辆智能度评价的研究成果。该研究旨在构建一个全面反映自动驾驶系统性能和用户体验的智能度评估体系,以推动高等级自动驾驶技术的发展。
王思涵同学首先介绍了研究背景,强调了当前自动驾驶技术在智能化验证方面存在的不足,特别是在L3级以上系统的智能性验证上存在盲区。现有的评估方法主要集中在基础安全指标,缺乏对用户体验和多维度性能的综合考量。为此,本研究提出了建立一套符合高等级自动驾驶验证需求且能反映用户主观体验感知的智能度评估体系。
研究内容
该研究从智能度的概念界定出发,探讨了自动驾驶系统应具备的能力,包括感知能力、规划能力、控制能力和人机交互等。在此基础上,她结合场景复杂度指标,建立了涵盖行驶安全、交规符合、行驶效率、行驶舒适和交通协调五个维度的评价体系。此外,王思涵还介绍了如何通过问卷调查收集用户反馈,并利用这些数据来完善评价体系,确保其全面性和公平性。
孙剑老师建议王思涵进一步明确指标评价体系的建立过程,具体说明每个指标的选择依据及其权重分配的方法。孙剑老师特别强调,清晰地展示评价体系的构建步骤有助于提升研究的透明度和可信度,使读者更容易理解整个评估框架的设计逻辑。
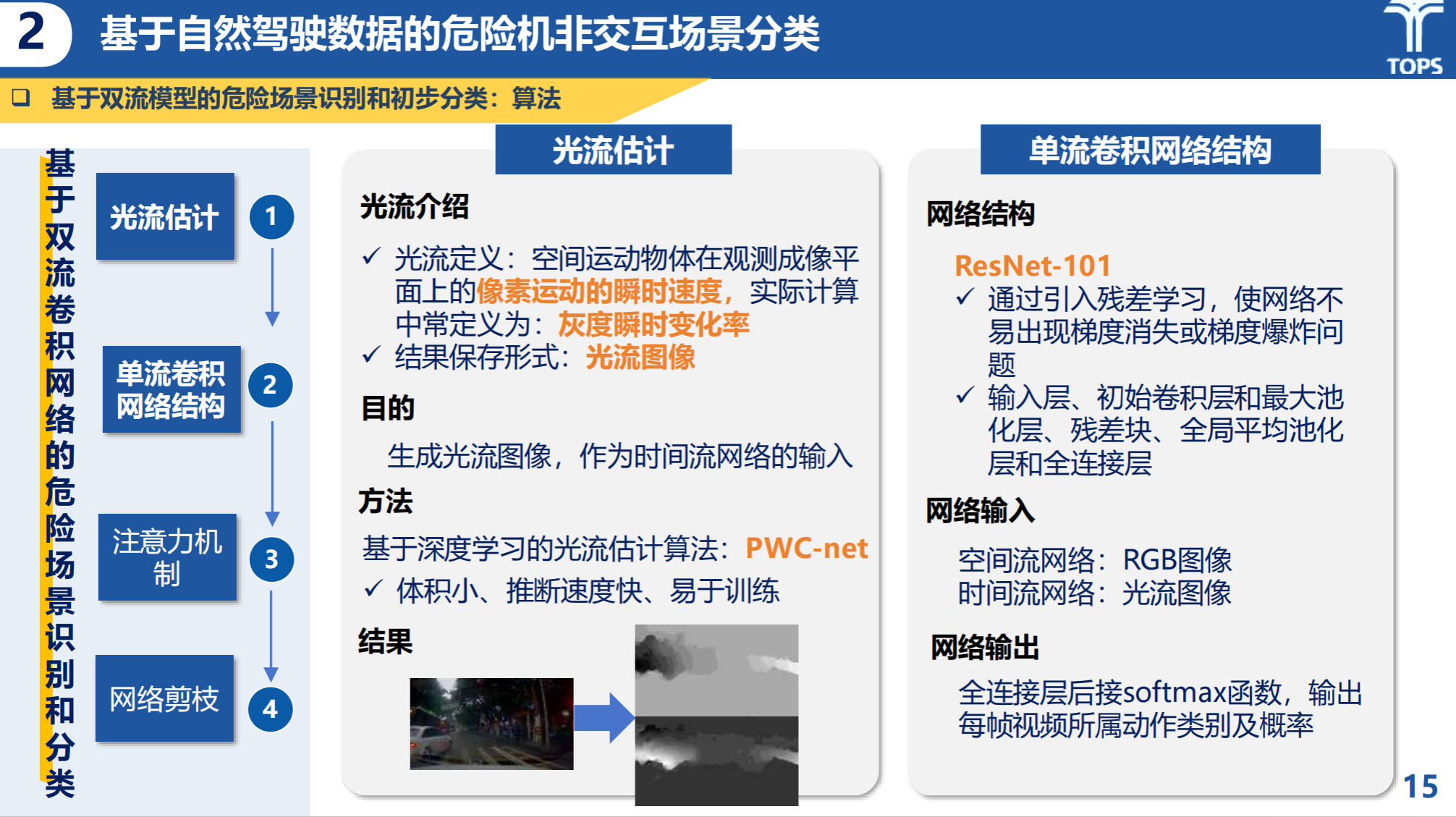
蔡依林同学展示了其关于面向自动驾驶测试的机非交互风险场景识别与生成的研究成果。该研究旨在通过开发有效的风险场景识别和生成方法,提升自动驾驶系统在复杂交通环境中的应对能力。
研究内容
蔡依林首先介绍了研究背景,强调了当前自动驾驶技术面临的挑战,特别是在处理机动车与非机动车交互时的风险识别问题。她指出,现有的测试方法和场景生成工具在模拟真实交通环境中的机非交互方面存在不足,导致评估结果的可信度较低。为此,蔡依林同学提出了基于参数分布的方法来生成危险场景,并利用深度学习模型进行风险场景的识别和分类。
研究内容
蔡依林详细阐述了研究中面临的主要挑战,包括如何准确模拟复杂的机非交互场景、如何确保生成的危险场景具有高度的真实性和多样性,以及如何有效地验证这些场景对自动驾驶系统的有效性。她的研究内容涵盖了从自然驾驶数据提取关键特征,到构建风险场景生成模型,再到设计闭环实验验证方法的全过程。
孙剑老师建议蔡依林进一步加强参数分布的危险场景生成的可信度,特别是需要引入闭环实验验证,以确保生成的场景能够真实反映实际交通环境中的风险情况。杭鹏老师则建议蔡依林更明确地展示研究挑战与研究内容之间的对应关系,清晰地说明每个研究挑战是如何通过具体的研究内容和技术手段来解决的,有助于增强读者对整个研究框架的理解和认可。
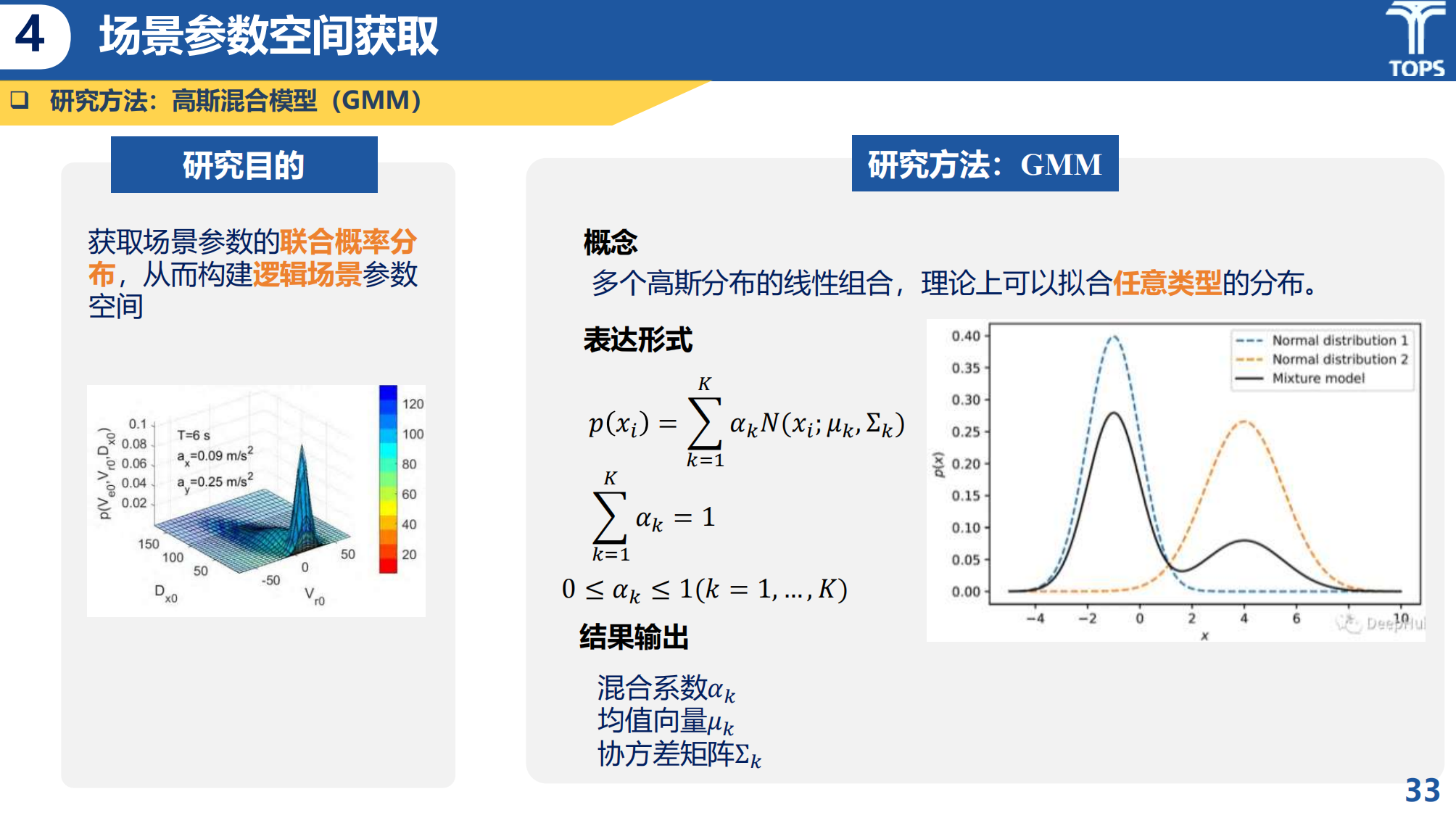
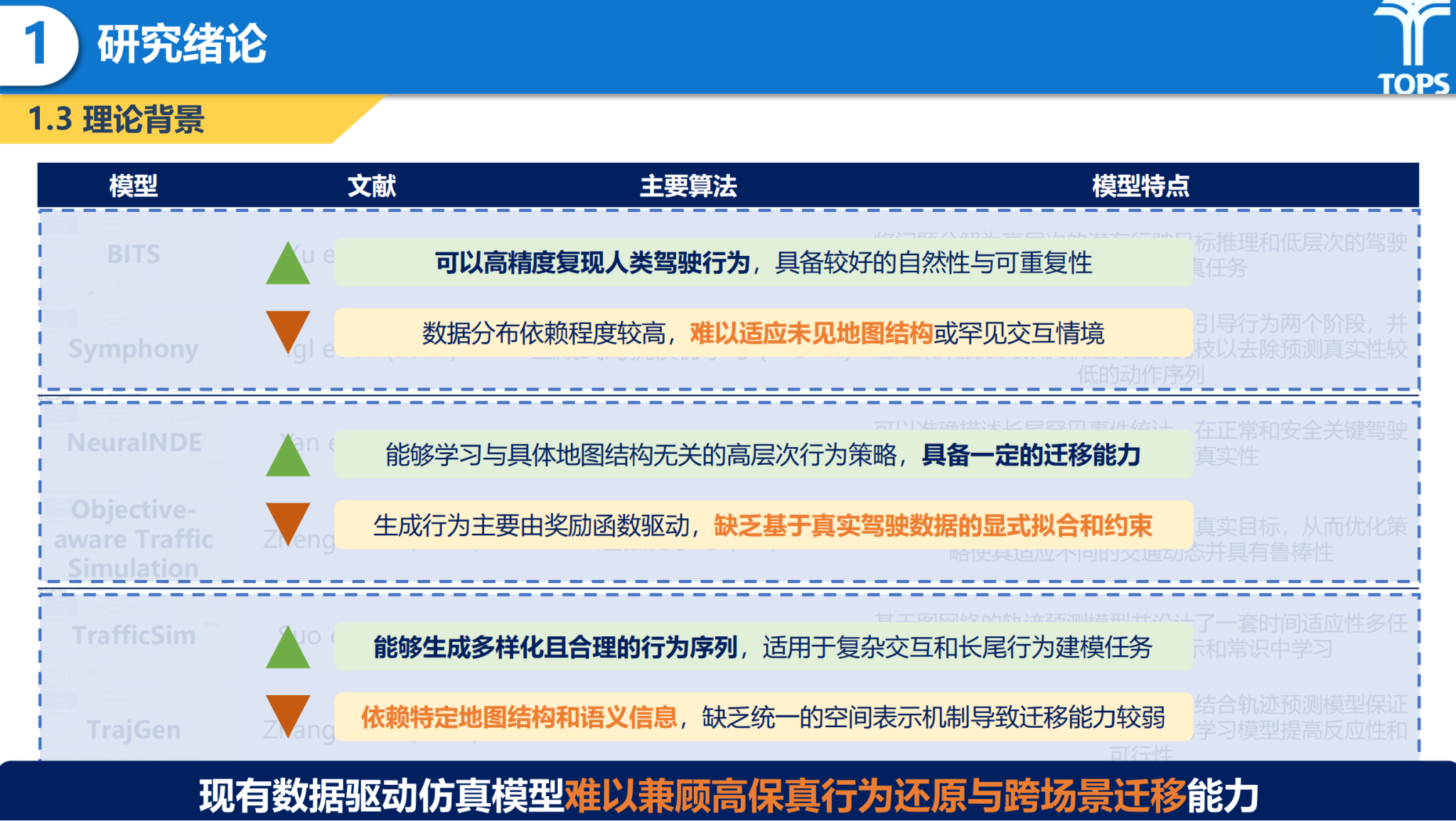
杨宇豪同学首先介绍了研究背景,强调了当前自动驾驶技术面临的挑战,特别是在大规模交通流模拟方面的需求。他指出,现有的交通仿真工具在处理高密度、多样化的交通流时存在局限性,导致测试结果的可靠性和覆盖面不足。为此,杨宇豪提出了基于数据驱动的方法来生成和模拟复杂的交通场景,以更好地支持自动驾驶系统的测试和验证。
研究内容
杨宇豪同学详细阐述了数据驱动的交通流仿真的具体实现过程。他从自然驾驶数据的采集与处理入手,介绍了如何利用这些数据训练深度学习模型,从而生成逼真的交通流场景。他还展示了如何将生成的场景应用于自动驾驶系统的测试中,并通过对比实验验证了数据驱动方法的有效性和优越性。此外,杨宇豪还讨论了不同交通流条件下仿真结果的一致性和可靠性。
最后,杨宇豪同学展示了其关于面向自动驾驶测试的数据驱动交通流仿真的研究成果。该研究旨在通过开发先进的交通流仿真方法,提升自动驾驶系统在复杂交通环境中的测试效率和准确性。

研究内容
孙剑老师建议杨宇豪进一步清晰地讲解数据驱动的交通流仿真的原理和流程,确保读者能够充分理解这种方法的优势和应用场景。孙剑老师特别强调,论文结构可以进一步优化,使得各部分内容之间的逻辑关系更加紧密,增强整体的连贯性。
本次组会内容丰富、讨论深入,五位汇报同学的研究涵盖了自动驾驶测试与评估的多个关键方向,展现了课题组在智能交通系统领域持续深耕的成果与思考。各位老师提出的宝贵意见不仅为同学们后续研究提供了明确方向,也进一步促进了课题组内的学术交流与思维碰撞。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}