2023年7月19日,TOPS第129期组会于通达馆A436线下举行。本次组会邀请了美国麻省大学陈丹珏副教授与我们分享《How Will Level 4 Self-Driving Cars Impact Traffic Flow? - Evidence From Empirical Data》的相关内容。另外,20级硕士生刘懿如和21级硕士生杨宇豪分别与大家交流讨论了《驾驶决策中的社会性交互行为研究》和《OnSite及自动驾驶仿真测试研究介绍》的相关内容。课题组全体老师同学出席了本次组会。

杨宇豪汇报时刻
首先,由杨宇豪与大家分享《OnSite及自动驾驶仿真测试研究介绍》相关内容。杨宇豪向大家介绍了仿真测试的背景与意义,由于自动驾驶需要应对现实世界各类场景,而百亿里程测试难题使得基于里程的传统实车道路测试已经不再适用,亟需虚拟仿真测试作为自动驾驶测试与验证的支柱。OnSite测试平台作为一个独立、自主、可控的自动驾驶公共服务平台,目前的1.0版本聚焦于为自动驾驶规划决策技术研发提供公开、透明、“有共识”的测试与评价服务。在第一届OnSite自动驾驶算法挑战赛中,超过500人,101个团队,40所国内外高校踊跃参与,收到了含312种不同版本规控算法。接着,杨宇豪展示了Onsite平台和科研的有机融合,包括:(1)场景生成——基于自然驾驶数据的场景构建:通过场景识别、分类、提取和标准化,实现车辆原始轨迹数据到标准化场景格式转换的工作流,并利用GAN实现将“现实约束”嵌入至VAE模型中:(2)针对不同稀有度的危险场景加速测试:稀有事件加速方法要解决目标场景稀有和搜索空间庞大(高维)的问题,同时保证统计意义上的无偏性,而小概率事件加速方法需要保证搜索方法的效率和准确度;(3)双向交互仿真测试:既包含轻量化片段式交通流仿真模块,也有与TESS NG连续场景的交互测试;(4)数据驱动的交通流仿真:选择LSTM模型,采用HRC方法,并采用一体化数据驱动仿真系统(Data-Driven Simulation System, DDSS)框架,实现轨迹预测和考虑形式规则的轨迹修正(5)从安全性、拟人化、交互性等维度评价并建立相应的自动驾驶评价指标体系。

《OnSite及自动驾驶仿真测试研究介绍》汇报内容
最后,杨宇豪对平台的未来规划进行展望,在2.0阶段,将建立X在环仿真测试,实现全栈技术测评;在3.0阶段,将建设测试场地、集群模拟、虚拟仿真三相映射科学装置,提供虚实融合全链条协同自动驾驶测试能力;而在4.0阶段,将从单车测试到协同测试,实现车车协同、车路协同测试。在讨论环节,陈丹珏老师与孙剑老师就自动驾驶算法挑战赛评分标准、平台场景数据来源、测试场地和车辆动力学仿真等问题展开交流。

刘懿如汇报时刻
接下来,20级硕士生刘懿如与大家分享《驾驶决策中的社会性交互行为研究》的相关内容。首先,刘懿如介绍了目前相关研究的关键科学问题,包括社会性驾驶交互行为刻画与模型构建、多个体动作依赖下驾驶交互行为的社会性参数辨识和人机交互行为的社会性差异量度与分析。接着,刘懿如对具体研究内容进行阐述,包括:(1)利用博弈论为社会性交互过程建立驾驶行为决策模型;(2)基于逆强化学习的驾驶交互行为模型的社会性参数辨识;(3)分析人人交互与人机交互时交互双方的社会性差异。最终得到人类驾驶车辆HV和自动驾驶车辆AV两个层面的结论:人类驾驶员面对AV具有行为放大现象,而调整降低让行场景中AV策略的竞争性,可以使得AV做出拟人化的行为。

《驾驶决策中的社会性交互行为研究》汇报内容
在讨论环节,陈丹珏老师就“让行事件中AV的竞争程度高于人类驾驶员”的结论和“行为放大”现象进行提问,几位老师和同学也展开了热烈的讨论。

陈丹珏老师分享时刻
紧接着,由陈丹珏老师进行《How Will Level 4 Self-Driving Cars Impact Traffic Flow? - Evidence From Empirical Data》相关内容的交流分享。首先,陈老师提出了研究的目标——基于Waymo数据集,聚焦于跟车行为,理解L4级自动驾驶车辆及其对交通流的影响。然后,陈老师介绍了Waymo数据集的基本情况和数据结构,并提出为后续分析所需要的数据筛选和处理方法。就研究方法而言,其底层逻辑是关注平衡状态下的特征,即通过估计平衡状态下的速度-间隔,画出基本图,对稳定速度、持续间距、稳定间距和可忽略的加速等概念进行定义以作为准则,建立基于Bin的速度-间隔线性模型。就研究结果来看,L4级自动驾驶车辆(Autonomous Vehicles, AV)与人类驾驶车辆(Human Vehicles, HV)行为相似,呈现线性s-v,但比HV更为保守。同时,AV对其跟随者和邻近车辆都有一定影响,并导致相邻的HV表现得与其他HV不同。此外,L4级别的AV的堵塞间距比HV的更大,而方差更小。总的来说,L4级AV将使得道路通行能力下降20%。
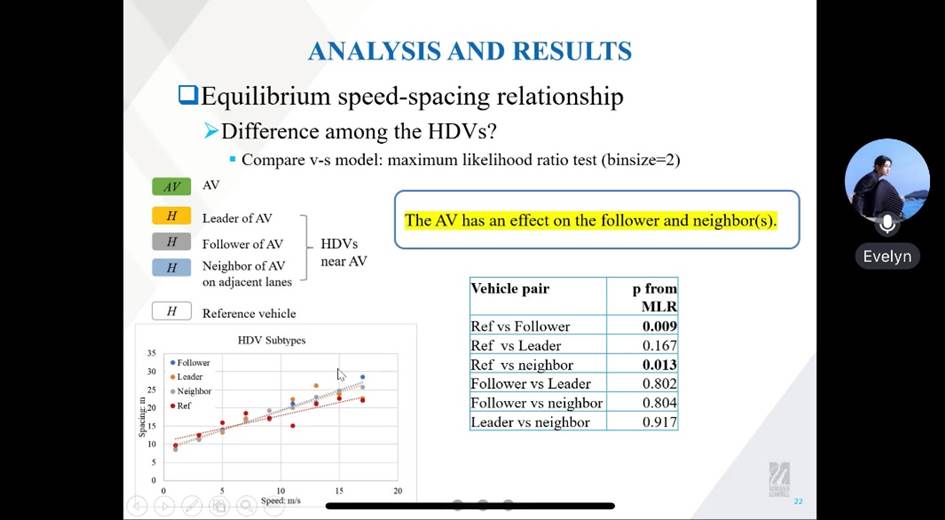
《How Will Level 4 Self-Driving Cars Impact Traffic Flow? - Evidence From Empirical Data》内容
在讨论环节,2014级硕士毕业生李铁男对Waymo数据集、研究换道行为的意义和工业界、学界对处理相关问题的导向差异提出自己的看法,2021级博士张小卉就数据集在其他研究方向的实用性提出问题,田野老师就AV对相邻车道上车辆的影响展开提问,孙剑老师提出对各类自动驾驶数据集做综述的必要性,并与陈老师探讨了运用其他模型和数据集的效果优劣。大家都从陈老师的分享中受益匪浅。
至此,本次组会圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}