2022年4月21日星期四,TOPS课题组第107期组会准时于线上召开。本期组会由19级博士研究生陈雪剑、19级博士研究生闫章存和21级硕士研究生苏兴浩分别就《多源交通数据环境下的全样本车辆行驶轨迹重构》、《共享空间混合交通流轨迹提取与重构》和《基于雷达数据的车辆行驶轨迹修复》与老师同门展开讨论。
三位主讲人就轨迹重构和修复问题,采用不同数据源、不同方法论开展研究。第一位主讲人陈雪剑的汇报从车辆轨迹的定义入手,对比了轨迹应用场景的广泛与探测轨迹的不准确、不完整现状。因此建立了宏微观整合(Macro-Micro-Intergrated)全样本车辆轨迹框架,并根据上次组会中田野副教授提出的如何重构换道轨迹的问题,着重调整了框架的宏观层部分,引入多车道交通状态估计元胞的方法以识别换道位置,进一步建立了密度差与换道位置的关系。最后使用ARZ模型+拓展卡尔曼滤波的方法对框架进行求解。
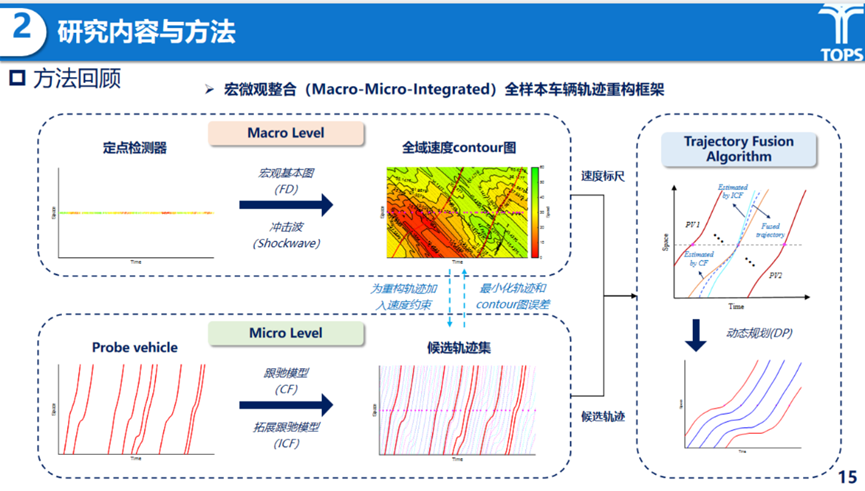
宏微观整合全样本车辆轨迹框架
第二位主讲人苏兴浩使用毫米波雷达轨迹数据,简述了毫米波雷达的工作原理和存在的问题,使用pNEUMA数据集,并以负指数分布删除部分轨迹数据后建立备选轨迹数据集。借鉴计算机视觉领域的纹理合成技术,以交通流约束+交通轨迹纹理合成的框架对数据进行重构补全。最后,通过对比线性插值、拉格朗日插值以及上述框架的轨迹修复结果,同时对有无交通纹理合成模块进行消融实验,进一步说明了其提出框架对于毫米波雷达数据轨迹重构的有效性。
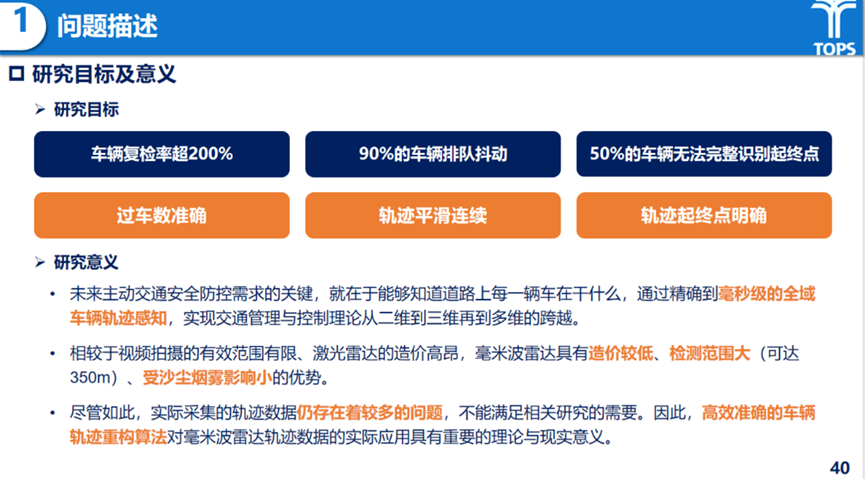
轨迹重构研究目标
最后一位主讲人闫章存则针对共享空间内混合交通流视频检测中遮挡问题开展研究,融合共享空间混合交通流模型与计算机视觉算法,以提升视频检测精度,现阶段研究针对理想视角中噪声和局部轨迹缺失问题,从机动车和非机动车两种思路对轨迹进行重构。
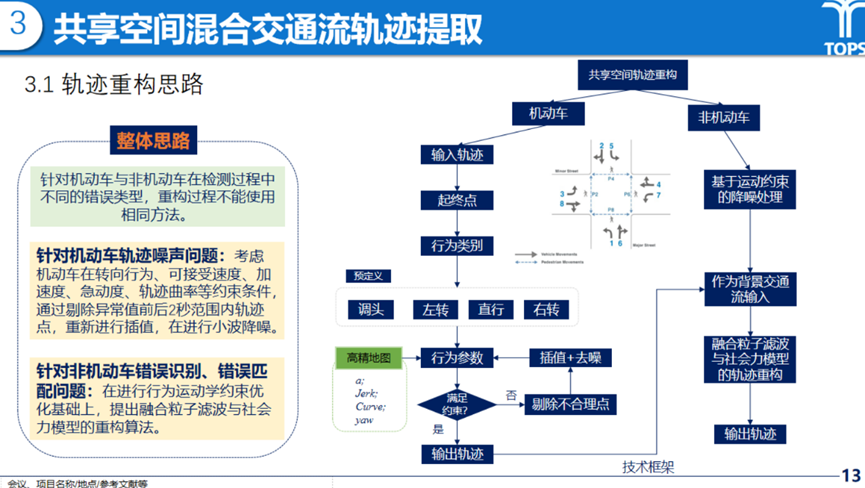
共享空间内混合交通轨迹重构思路
讨论环节,孙剑教授首先说明了三位主讲人的研究虽然看起来有一定相似性,有部分相通的内容和方法论,但是做研究要以问题驱动,告诫同学们应该跳出方法的桎梏。倪颖副教授紧接着指出目前课题组内有许多同学的研究存在共同点,希望学生之间多交流讨论。岳李圣飒老师指出相比于其他主讲人,闫章存的研究重点之一是混合交通流的特性,而使用的yolo算法在追求效率的同时可能牺牲了一定精度,建议其多多尝试其他的方法。秦国阳老师就苏兴浩研究中对于停车起步轨迹重构的精度不高的现象,提出结合交通理论建立一些基本纹理模块的思路。胡祥旺建议陈雪剑在划分元胞时按照交通波的方向进行,同时从审稿人的角度出发指出苏兴浩研究中几处不足之处。最后,已经毕业的张一豪师兄也积极参与了本次组会的讨论,并在技术路线上给出了许多建议。
讨论环节结束后,几位老师还对目前正在寝室隔离的课题组同学们逐级进行了情况了解。希望疫情早日结束,TOPS课题组加油!
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}