2026年5月28日,TOPS第182期组会于通达馆A102线下举行。本次组会由24级硕士赵梓皓进行以《基于舱驾融合信息的驾驶人主观风险认知辨识》为主题的学术报告分享。课题组全体老师同学出席了本次组会。

图1 汇报时刻
赵梓皓同学从研究背景、研究内容、实验结果和后续计划四个方面展开介绍。在研究背景方面,赵梓皓同学指出,尽管当前自动驾驶技术取得了快速发展,但在L2级等人机共驾场景下,接管阶段仍然是自动驾驶人机交互过程中的重要风险源。由于驾驶员在接管时往往存在风险感知偏差,单纯依赖客观风险进行预警提示难以有效避免碰撞事故。为应对这一问题,行业逐渐探索舱驾信息融合的新方向,但受限于现有应用多服务于体验优化而非安全导向,且缺乏对驾驶员主观风险认知的辨识,该模式容易产生漏报或频繁冗余提示,导致驾驶员视线频繁转移与分心,亟需构建安全导向的驾驶人主观风险认知辨识框架。
进一步地,现有舱驾融合的数据获取与推理算法仍存在不足:公开驾驶数据集缺乏完备的多模态生理数据,异质多模态信息面临难对齐、难融合等治理难题,难以支持高质量算法的开发与验证;同时,现有驾驶员风险状态辨识过度依赖于理想条件下的生理特征,在面临恶劣光照或面部遮挡等低可靠度观测条件时缺乏鲁棒性,限制了舱驾融合感知系统的实际应用与落地。
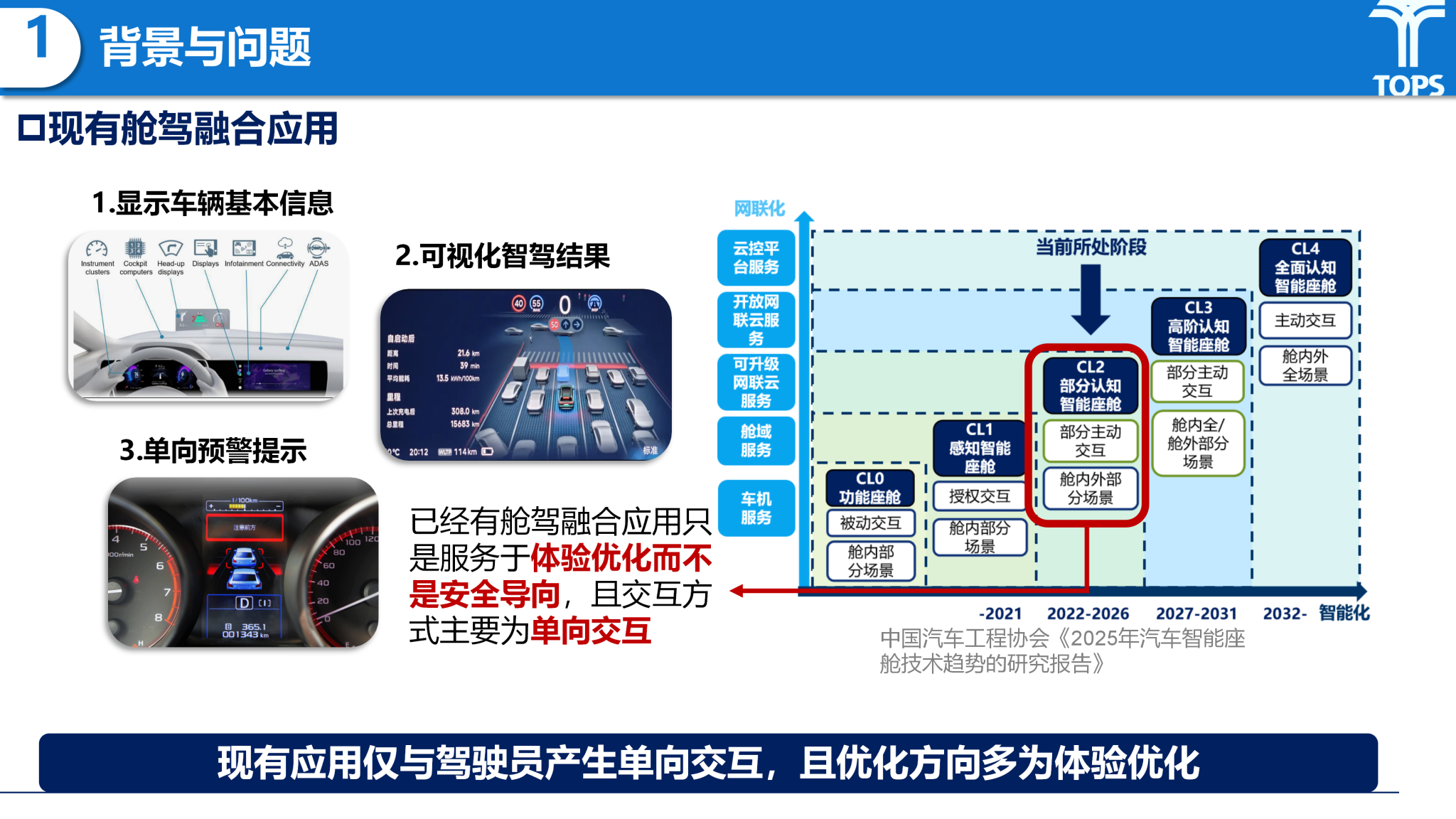
图2 研究背景
基于此,赵梓皓同学提出构建基于主客观认知对齐的舱驾融合系统的研究思路,旨在在低可靠度多模态观测条件的前提下,鲁棒地推断驾驶人的注意力分布与主观风险感知状态,并将其与客观环境风险特征进行对齐评估,从而优化传统预警提示算法、减少冗余信息与驾驶员分心情况,推动人机共驾系统在安全导向下持续优化。
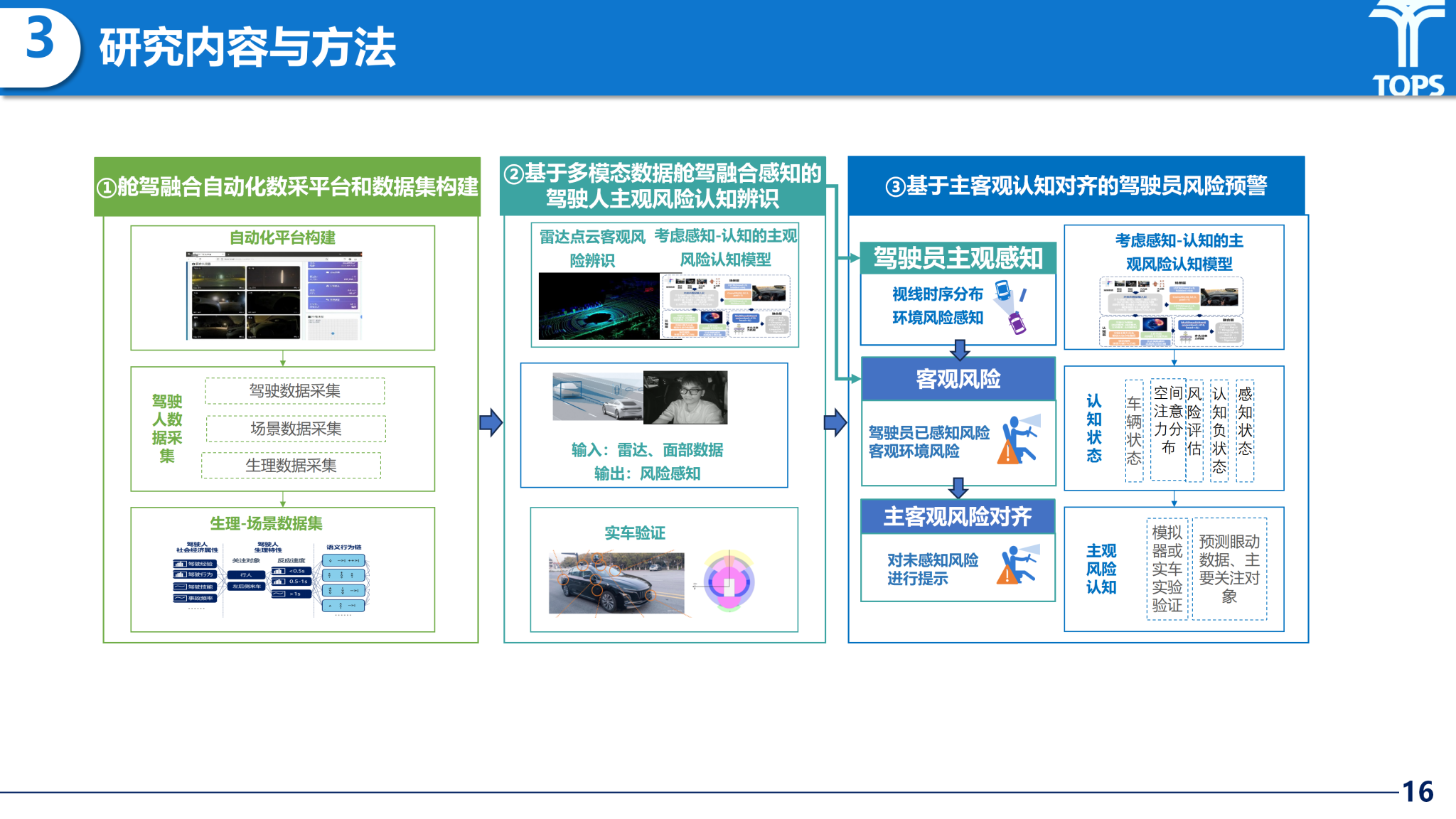
图3 技术路线
在研究内容方面,赵梓皓同学针对异质多模态数据治理与低可靠度数据源鲁棒推理两大核心难点,设计了一套贯穿自动化数采、多模态感知辨识与风险预警评估的综合性解决方案。在数据处理方面,他首先搭建了舱驾融合自动化数据采集平台,采用硬件高精度时间同步协议PTP与自动化工作流联合的构建方式,将异质多模态信息转化为高质量的场景与生理数据集,确保多源异构数据能够切实落地为对齐且完备的训练素材。以此为依托,该方案以多模态数据舱驾融合感知算法为驱动引擎,通过提取头部姿态、车辆定位以及场景风险等特征,结合图神经网络GNN与门控循环单元GRU,持续且鲁棒地预测驾驶员的注意力分布与视线状态。
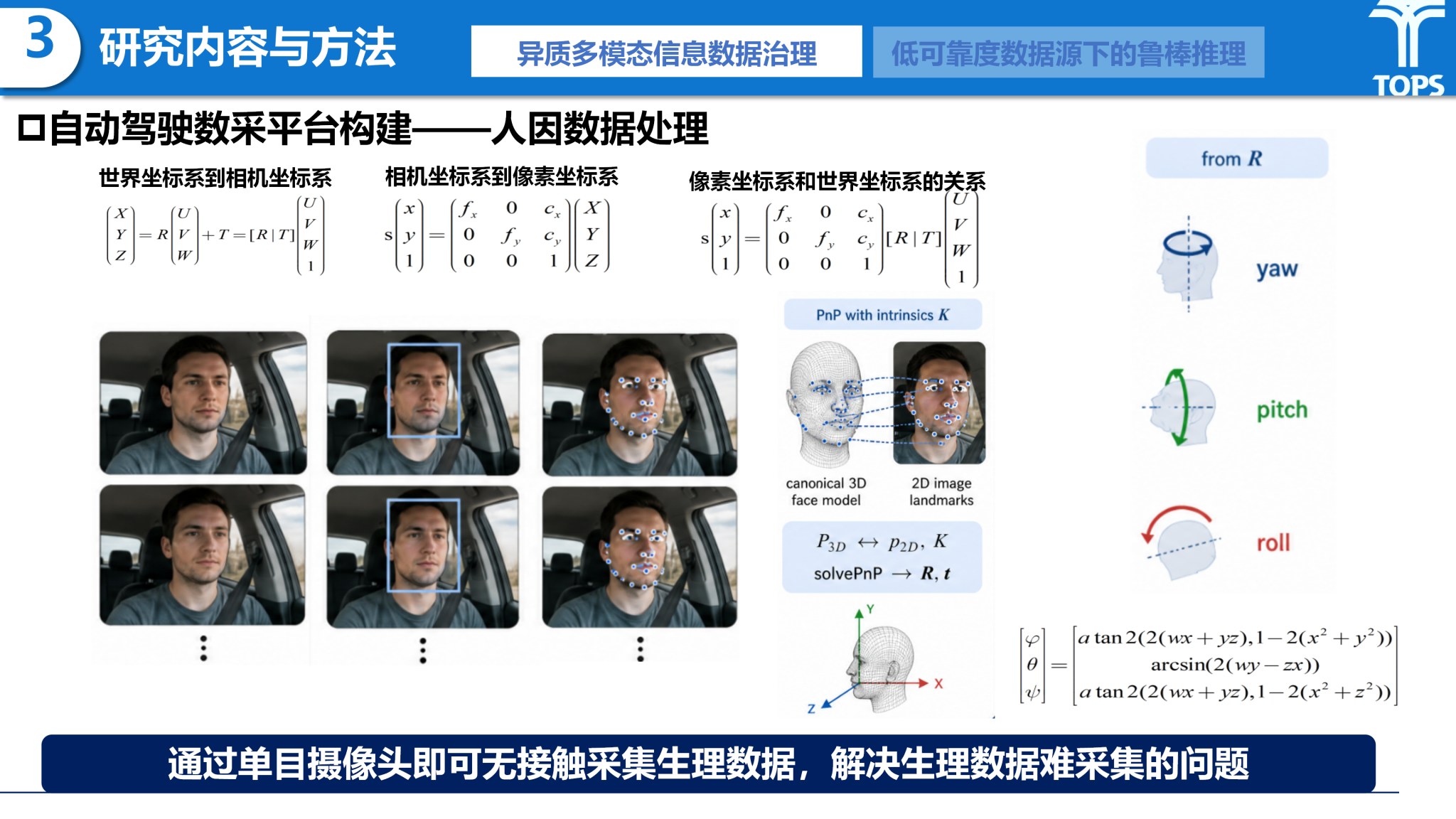
图4 研究内容
在此基础上,该框架引入了场景风险特征分析机制,以保障客观环境风险评估的准确性。通过构建BEV五通道图像,提取空间衰减与风险质心等指标,并借助类别权重分析精确定位关键风险目标。同时,为应对恶劣光照或面部遮挡等低可靠观测条件,方案设计了基于眼动特征的驾驶员风险认知状态分析模块。借助扫视包络估计与双阈值判定等技术,模型不仅实现了复杂条件下的鲁棒推理,还显著提升了关键注意力对象的检出率,为最终的主客观认知对齐奠定了坚实的评估基础。
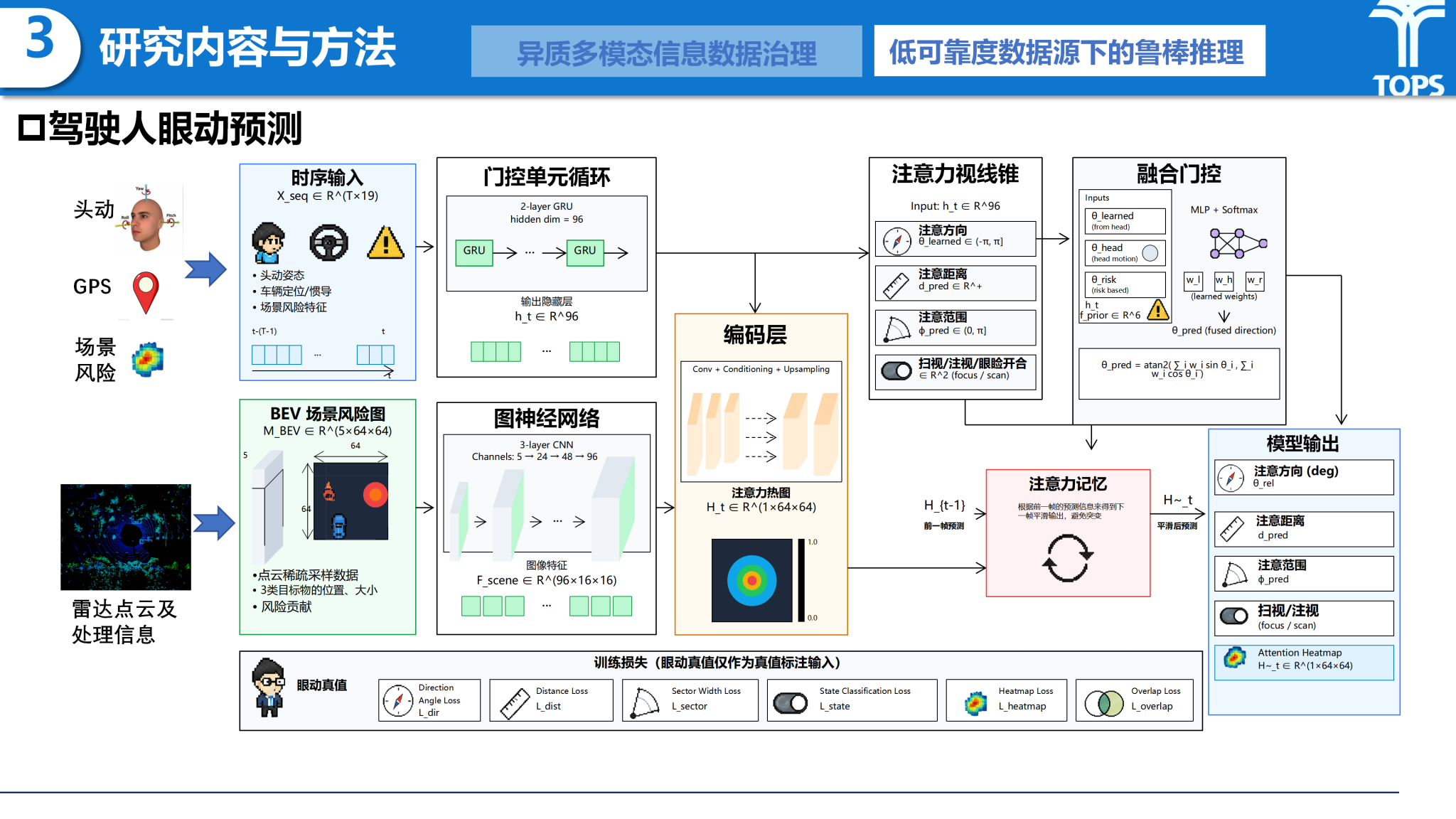
图5 研究内容
上述两个模块相互耦合,共同构成了完整的主客观风险对齐预警闭环:自动化数采平台统筹异质多模态信息的数据治理,融合感知算法保障低可靠度下状态推理的鲁棒性,而风险对齐机制则为精准的预警提示提供核心支撑。整个流程从多源异构的舱内外传感器数据出发,经由模型深度推理与主客观风险评估对齐,最终输出高价值的风险认知辨识结果。这一系列工作,对“如何获取高质量的驾驶场景-生理数据”以及“如何在多模态数据可靠度低的条件下进行驾驶员注意力鲁棒推理”这两个核心问题给出了系统性的回答。
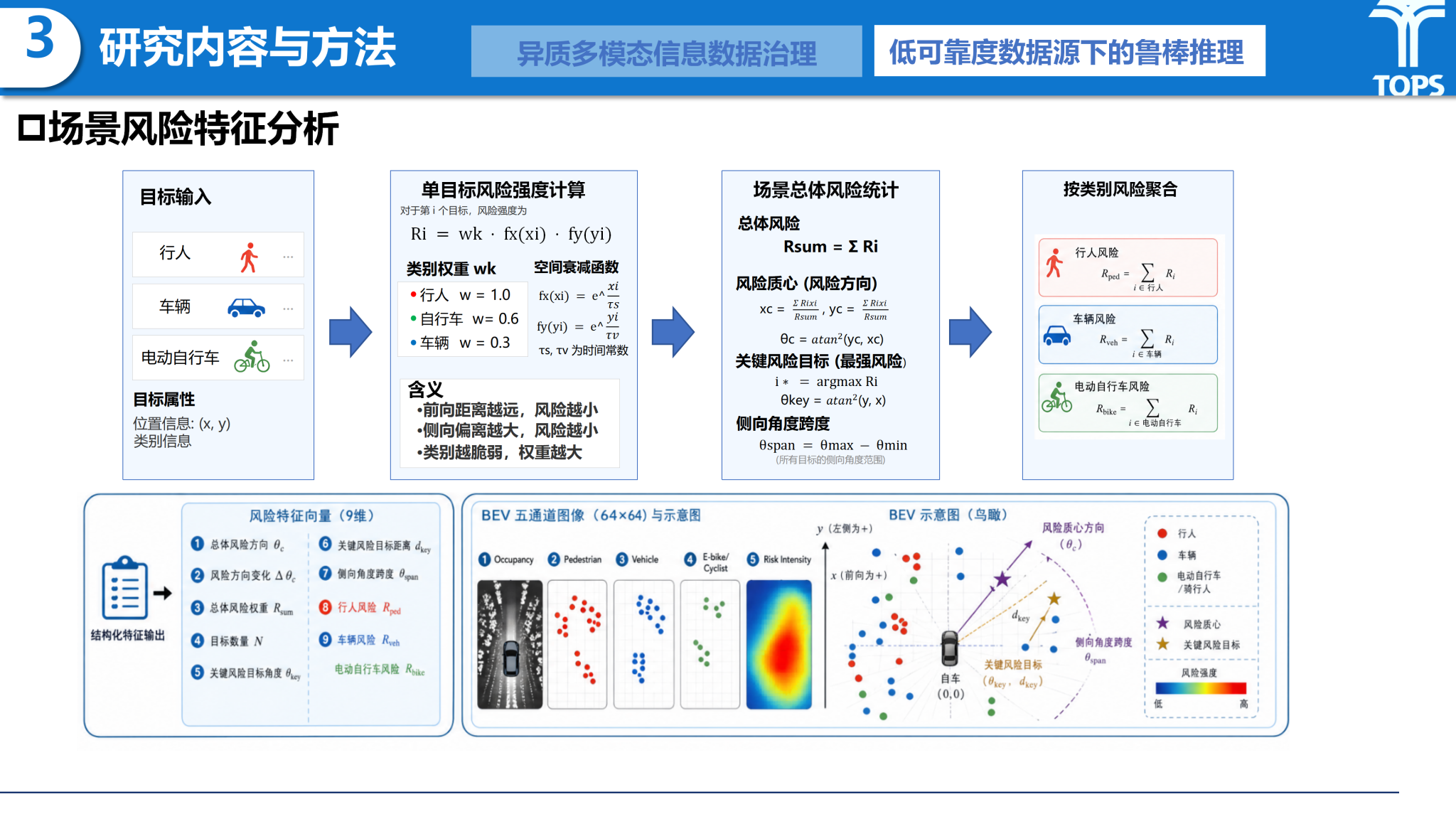
图6 研究内容
在实验分析方面,赵梓皓同学基于阳澄半岛智能网联测试场开展的90轮次实车实验数据,对所提出的舱驾融合感知算法进行了系统验证。实车实验涵盖了隧道、十字路口等多样化道路,以及雨天、鬼探头、车辆加塞等复杂交互与恶劣驾驶场景。结果表明,该方法在低可靠度观测与高精度预测之间取得了优异表现:一方面,模型能够准确还原驾驶员“专注—扫视—注意收敛”的动态认知过程,预测的注意力趋势与眼动真值高度吻合;另一方面,在面临关键风险交互帧时,预测的视线范围和角度能够迅速收缩并精准聚焦于核心风险源,展现出强大的主观风险辨识能力。
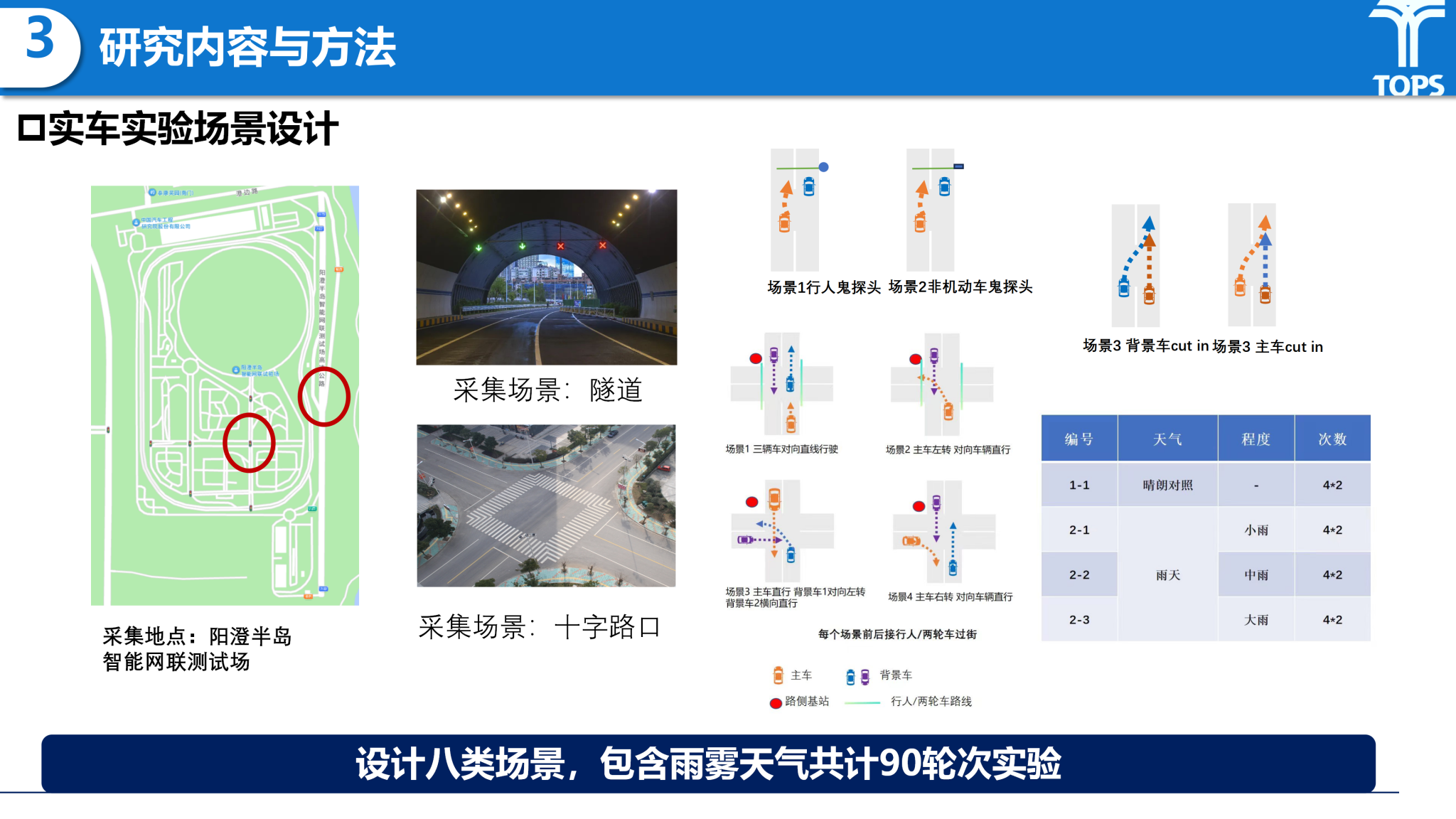
图7 实验设计
在关键性能指标与特性验证中,多模态特征的融合表现出重要作用。该算法对关键注意力对象的检出率达到86.3%,且对比分析表明,引入眼睑开合状态等生理特征后,能够进一步降低模型预测的MAE。针对实车时序数据的深入分析表明,该框架能够清晰揭示驾驶员在“风险出现时注意力收缩、风险后短暂扫视、最终回归正常注意力”的行为规律,较好地证明了注意力预测算法在真实且复杂的舱驾融合场景下具备高度的有效性与鲁棒性。

图8 实验分析
未来,赵梓皓同学将围绕主客观认知对齐的驾驶员风险预警影响验证、多源数据融合的眼动预测模型构建与鲁棒性提升,以及传统提示算法的冗余信息与分心次数优化等方向开展深入研究,期待相关研究为减少人机交互失效事故、推动安全导向的舱驾融合自动驾驶系统落地提供更加坚实的理论与技术支撑。
汇报结束后,与会师生围绕研究内容展开了深入讨论。石皓天老师首先针对研究的实际落地应用提出了探讨,建议进一步明确研究成果的转化出口。梁浩阳老师指出部分内容与主题的相关性尚需加强,建议明确具体工作与数采平台的关联度。倪颖老师建议针对非理想条件下的现有研究补充更充分的文献调研,并进一步加强理论方法与实际场景的关联。孙杰老师则认为当前研究的应用意义尚不够清晰,特别是对于“人驾数据如何在自动驾驶系统中有效利用”以及“算法鲁棒性”等问题提出了建设性的意见。最后,孙剑老师作总结发言,他首先肯定了赵梓皓同学的个人进步与扎实的工程开发能力,同时建议后续需进一步找准核心科研问题,理顺“问题提出—研究方法—闭环效果”的整体逻辑。整场研讨在积极而浓厚的学术氛围中顺利结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}