2026年1月14日,TOPS第175期组会于通达馆A102线下举行。本次组会由25级硕士郑伊婧和24级硕士连邦安进行《面向自动化码头的多AGV协同动态调度》和《交叉口复杂交互行为链式决策建模》主题的学术报告分享。课题组全体老师同学出席了本次组会。

汇报时刻
郑伊婧同学从研究背景、研究内容、实验结果和总结与展望四个方面展开介绍。在研究背景方面,郑伊婧同学指出,随着集装箱吞吐量持续增长和船舶大型化趋势加剧,传统集装箱码头在作业效率、人力成本和安全性方面已难以满足现代港口发展的需求,自动化码头成为重要发展方向。然而,现有自动化码头中多AGV调度系统普遍采用任务分配与路径规划相互割裂的串行结构,难以有效应对复杂路况、动态任务生成和多车冲突等现实问题,导致系统整体效率下降、拥堵与死锁风险增加。

研究背景
为此,郑伊婧提出了面向自动化码头的多AGV协同动态调度研究思路,旨在打破传统调度架构中任务分配、路径规划和运动控制相互独立的局限,通过构建多层次、可反馈的协同调度框架,实现多AGV在动态环境下的高效协作。该研究以提升整体运输效率、增强系统稳定性和降低冲突风险为目标,通过耦合决策与执行过程,使调度系统能够感知真实运行状态并进行动态调整,更贴合自动化码头的实际运行需求。

研究目标
在研究内容方面,郑伊婧同学围绕多AGV协同调度问题,系统性地构建了分层优化的调度框架。具体而言,在宏观层面将任务分配问题建模为部分可观测的SMDP,引入强化学习方法实现对动态任务的自适应分配;在中观层面提出基于时空负载的路径规划算法,通过特征区域划分与负载评估生成全局最优且均衡的路径方案;在微观层面则基于图论方法进行集中式运动控制,针对局部冲突预测并确定通行顺序,从而形成“任务分配—路径规划—运动控制”之间的闭环协同机制。
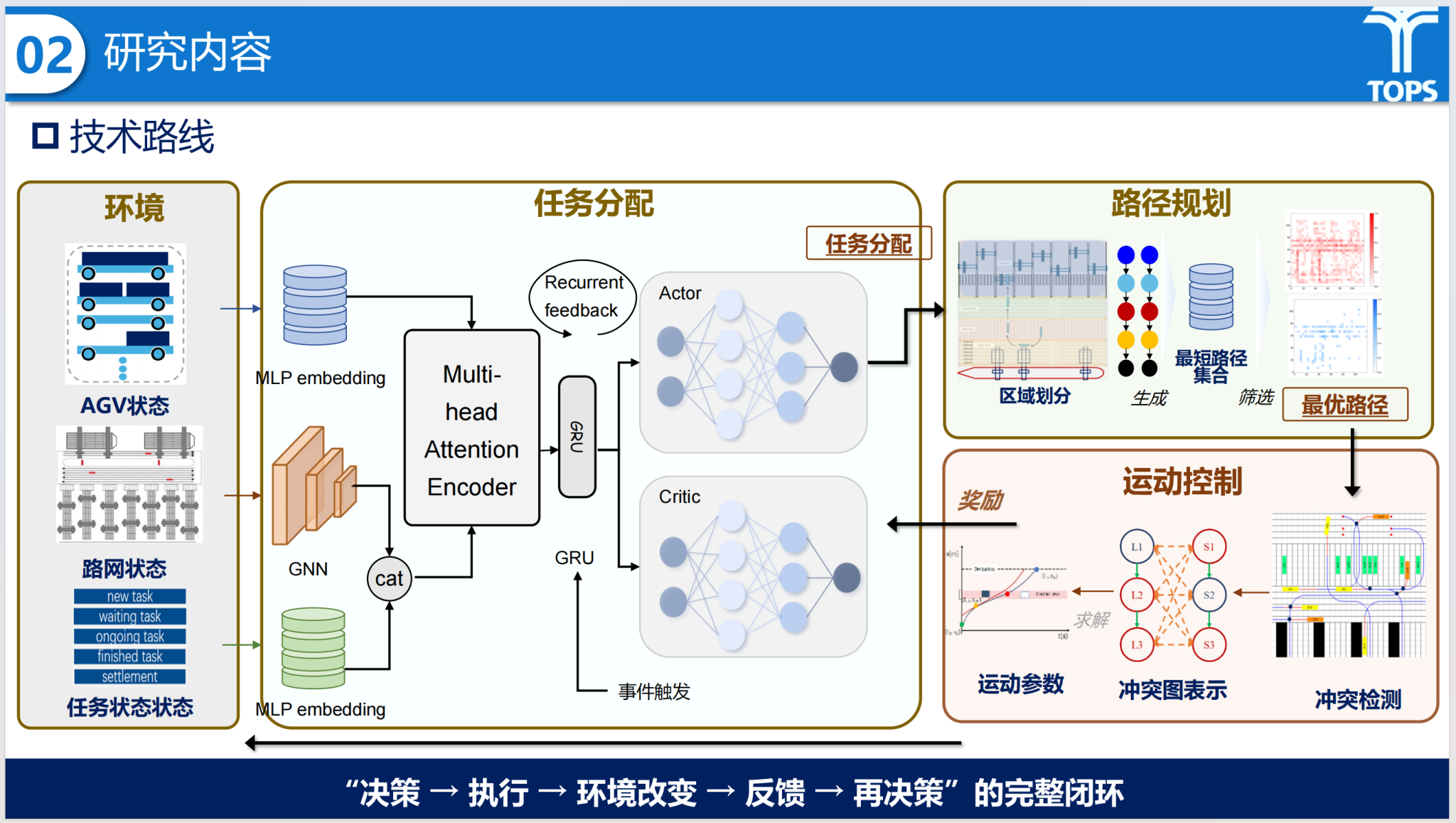
研究内容
在实验结果方面,郑伊婧同学通过构建典型自动化码头仿真场景,对所提出的方法与传统就近分配加入路径规划策略进行了系统对比。实验结果表明,该方法在路网负载均衡性、总体运输时间和总行程等关键指标上均取得明显改进,整体运输效率提升约17%。同时,在引入协同运动控制后,系统冲突解决率显著提高,表现出更强的稳定性与鲁棒性。此外,算法在实时性方面具有较好的求解效率,能够满足自动化码头对高实时调度的实际需求。
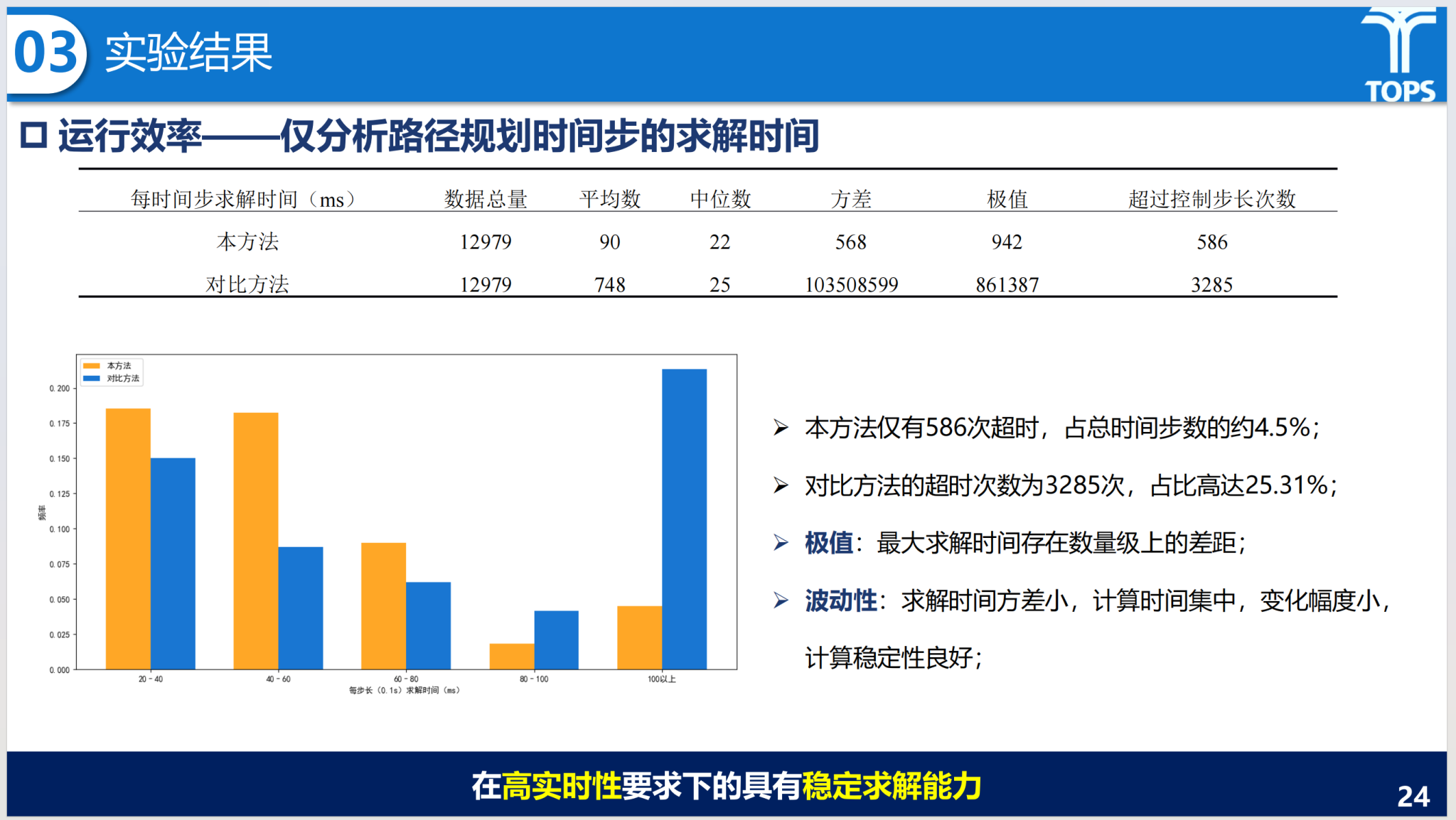
研究结果
汇报结束后,课题组成员针对上述研究展开讨论。田野老师建议明确问题边界与研究动机,重点说明港口场景下任务分配与路径规划耦合的必要性;指出当前设定较为理想化,现实挑战性不足,流量负载均衡应作为优化结果而非目标;同时建议放慢语速、加强演练,以提升汇报的清晰度与说服力。孙杰老师建议优先关注任务分配与路径规划中更贴近实际的港口约束,相较之下运动控制对整体效率影响有限,可适当弱化。石皓天老师建议在技术路线前明确研究问题,用数学形式清晰说明输入、输出与优化目标;同时需进一步阐明任务分配、路径规划与运动控制耦合研究的核心意义与学术价值。
接着连邦安同学从研究背景、研究内容、实验成果、总结与展望四个方面对《交叉口复杂交互行为链式决策建模》研究展开介绍。

汇报时刻
研究背景部分连邦安同学指出在真实城市交通环境中,交叉口是交通冲突最为集中、行为交互最为复杂的关键场景,尤其是在无保护左转等典型工况下,多辆机动车、非机动车及行人之间存在频繁博弈与动态协同。传统基于规则或单一决策假设的方法难以刻画交通参与者在连续时序中的决策演化过程,而纯数据驱动方法又普遍缺乏可解释性与可控性,难以支撑自动驾驶系统在复杂交互场景下的安全评估与仿真训练,因此亟需一种能够兼顾行为真实性、结构化表达与解释能力的决策建模方法。
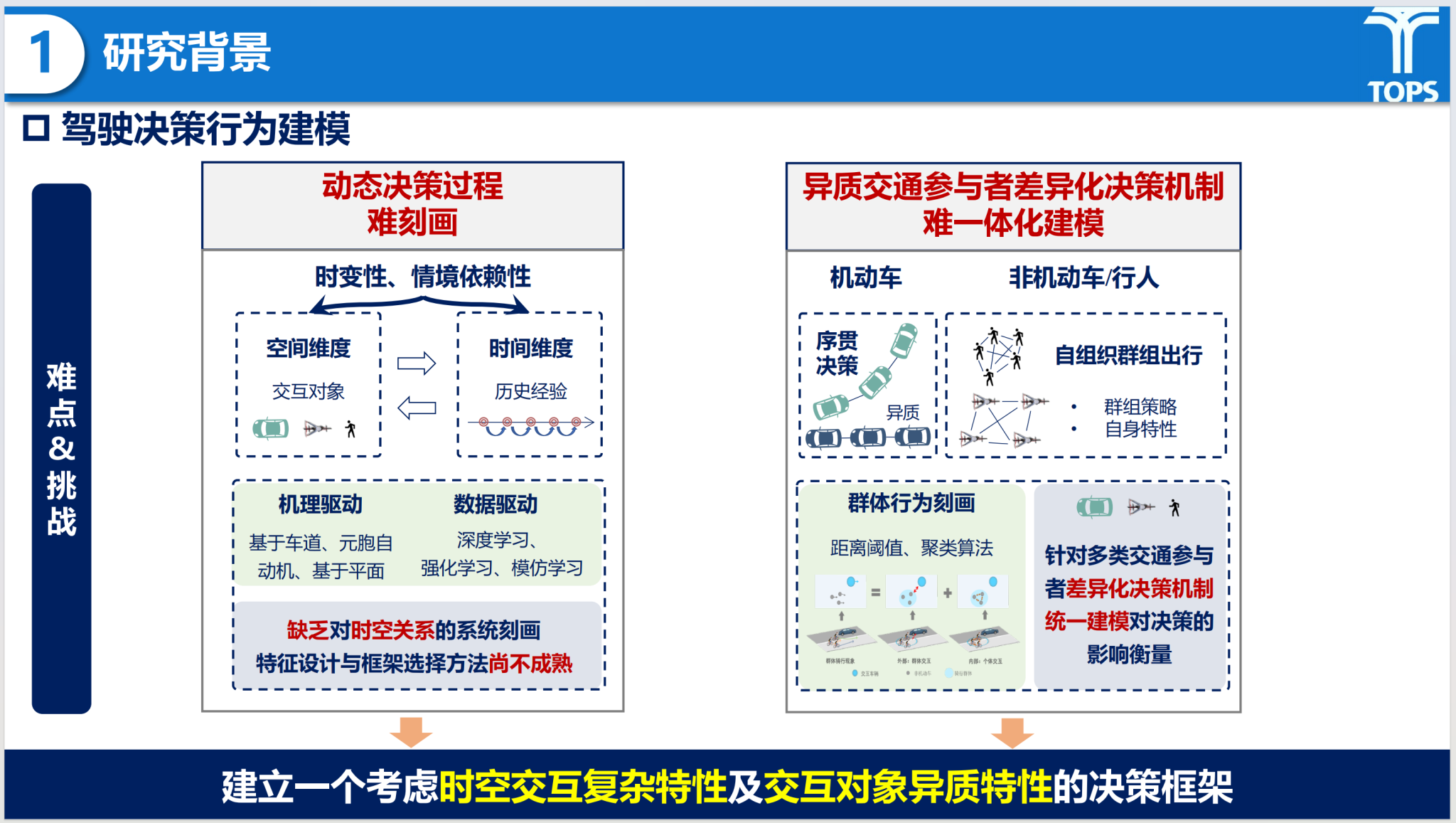
研究背景
为解决上述问题,连邦安同学构建了一种面向交叉口复杂交互行为的链式决策建模框架,将车辆在交叉口内的决策过程拆解为多个关键决策节点,并引入速度—风险场理论统一描述异质交通参与者的时空影响关系。在模型实现上,通过结合CVAE的隐变量建模能力与Swin Transformer的全局特征提取优势,实现对左转车辆抢行、让行等决策序列的建模,从而有效捕捉多主体交互条件下决策演化的内在机理。
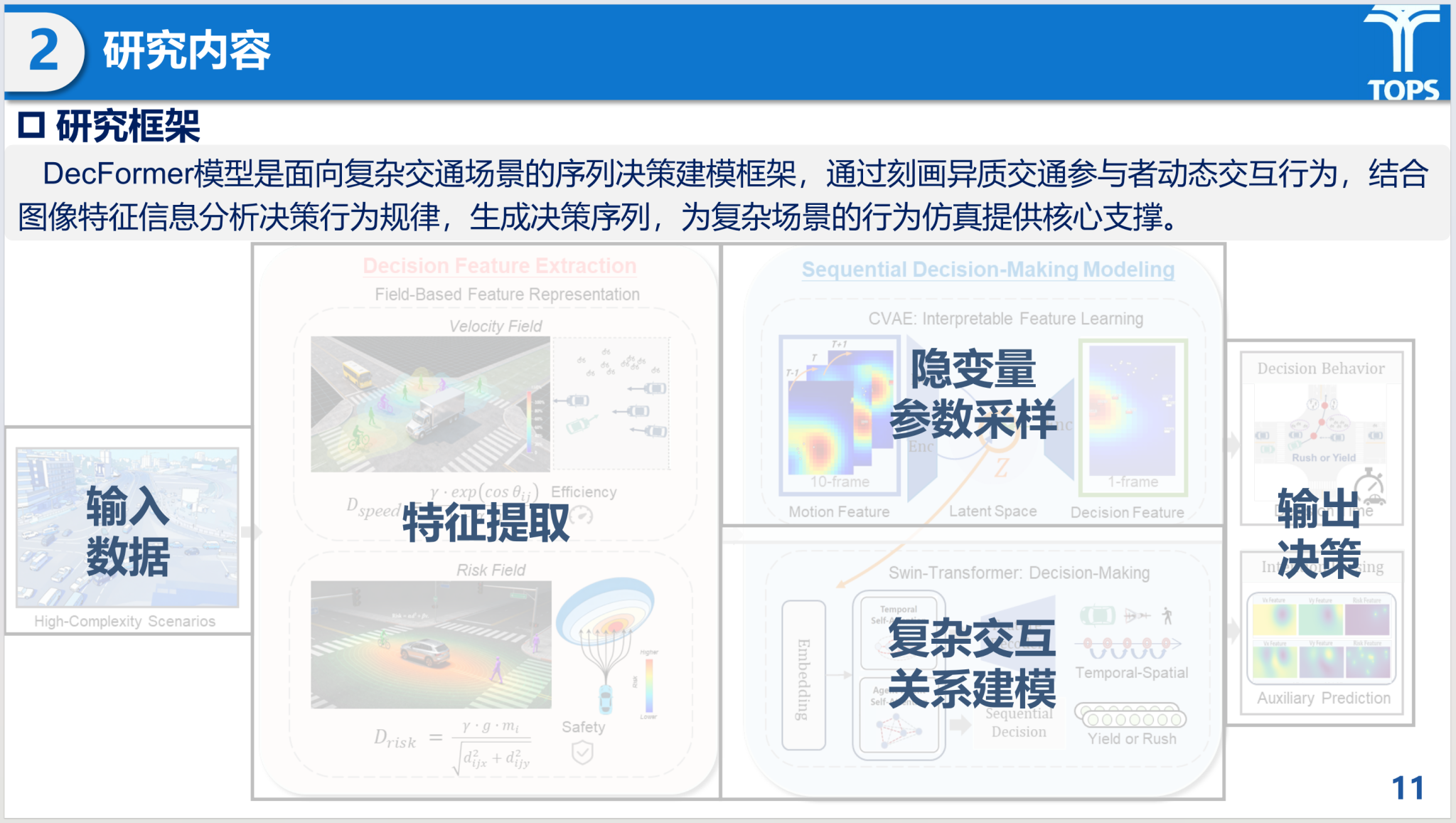
研究内容
实验结果方面,在真实数据集上的实验结果表明,该方法在多项决策预测指标上均优于对比基线模型,能够更准确地还原车辆在复杂交互场景中的决策序列。同时,速度—风险场特征显著提升了模型对全局交通态势的感知能力,结合SHAP分析进一步验证了不同特征在决策生成中的作用机制,体现了模型在预测性能与可解释性方面的综合优势。

实验验证
未来连邦安同学将在现有研究基础上,进一步拓展该链式决策模型在复杂场景生成与可控仿真中的应用,探索结合扩散模型等生成式方法实现不同交互强度、不同驾驶风格的场景构造,并将相关成果应用于自动驾驶系统的训练、测试与安全评估中,以支撑更高保真度的交叉口交互建模。
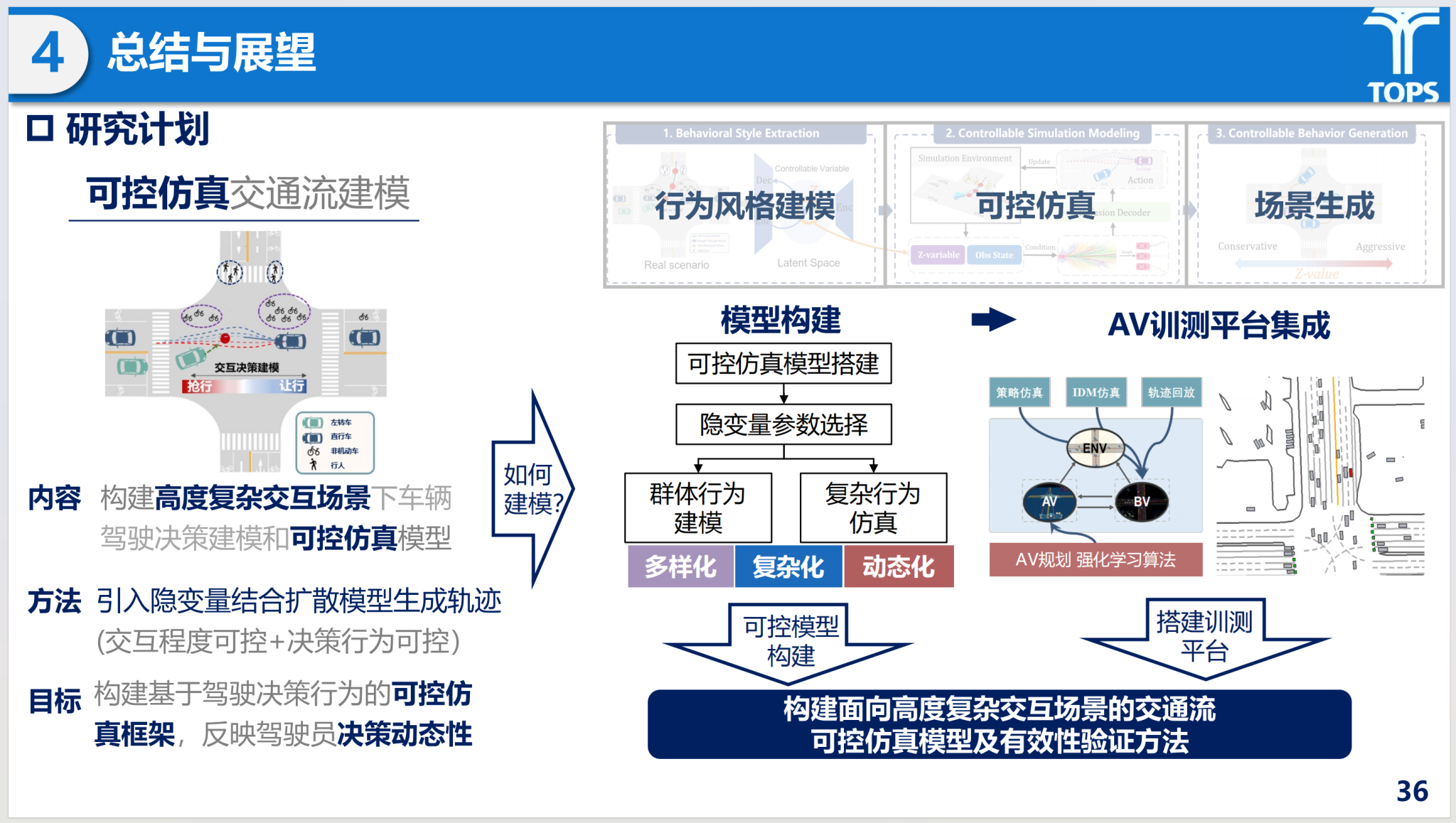
研究展望
汇报结束后,与会师生围绕研究内容展开了深入讨论。倪颖老师建议方法设计应与问题规模匹配,避免不必要的模型复杂性堆叠,研究视角偏微观,建议尝试宏观拓展,以提升整体价值与应用意义。田野老师建议聚焦研究重点,充分挖掘现有模型潜力,强化案例对比分析,探索创新研究切入点,以提升解释力和推广价值。杭鹏老师建议与组内相关研究系统对比,验证模型优势,明确研究未来出口。整场研讨在积极而富有浓厚的学术氛围中顺利结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}