2025年11月,课题组成员前往澳大利亚黄金海岸参加第28届IEEE智能交通系统国际会议(IEEE ITSC 2025)。本次会议汇聚了来自世界各地的智能交通系统领域的专家学者,围绕理论分析、数值模拟、建模实验、实验室或现场测试等多个前沿主题展开深入讨论。大语言模型、基础世界模型等技术在自动驾驶中的应用继续成为研究热点,会场内洋溢着积极而活跃的学术交流氛围。
Part 1:ITSC|智慧碰撞·学术探索
在国际智能交通领域顶级学术会议 IEEE Intelligent Transportation Systems Conference 2025(ITSC 2025)上,TOPS 课题组多名成员受邀作学术报告,系统展示了在车队协同控制、智能交通安全感知以及以人为本自动驾驶等方面的最新研究进展,进一步提升了课题组在智能交通与自动驾驶领域的国际学术影响力。
在大会报告环节中,孔爱静作了题为《A Distributed Platoon Reconfiguration Framework in Emergency Scenarios with Heterogeneous MARL》的学术报告。该工作围绕应急场景下的智能车队协同重构问题,探索利用异质多智能体强化学习实现分布式车队编队调整的思路,为复杂交通与突发事件条件下的车队安全高效运行提供了新的解决框架,受到与会专家的关注与讨论。
课题组博士生孔爱静进行汇报
李思营围绕交通安全与弱势交通参与者保护作了两场相关报告。其一为《VRU-Centric Hazardous Scenario Detection via Monocular Spatiotemporal Feature Fusion》,面向行人、非机动车等弱势交通参与者(VRU),尝试基于单目视觉时空特征融合,实现对潜在危险场景的精细化检测与提前预警,为“以行人安全为中心”的交通环境构建提供技术支撑。其二代表连邦安作报告《Decision-Making Modeling a Complex Mixed-flow Intersections: A Hybrid CVAE-Transformer Framework》,工作聚焦复杂混合交通路口场景下的智能决策建模,提出将条件变分自编码器与 Transformer 结合的混合框架,以刻画多主体、多类型交通参与者在交织流中的不确定行为模式,与会学者就模型泛化性与落地应用等问题展开了深入交流。

课题组博士生李思营进行汇报
徐成凯则重点展示了课题组在基于 Foundation Model 的自动驾驶方向上的最新探索。他首先作了题为《Towards Human-Centric Autonomous Driving: A Fast-Slow Architecture Integrating Large Language Model Guidance with Reinforcement Learning》的报告。该研究面向“人本交通”与可解释自动驾驶需求,提出快-慢结合(Fast-Slow)的双层架构,将大语言模型的高层语义理解与强化学习的低层控制策略有机融合。参会者对“以人为本”的研究视角和将 LLM 引入自动驾驶决策过程的设计理念表现出浓厚兴趣,现场问答环节气氛热烈,相关问题涉及系统实时性、可解释性及在真实道路环境中的可推广性等多个方面。随后,徐成凯还汇报了《Lead: The LLM Enhanced Planning System Converged with End-to-End Autonomous Driving》,介绍了课题组在将 LLM 增强规划系统与端到端自动驾驶框架融合方面的探索实践,展示了在复杂场景理解与决策协同上的潜在优势。
课题组硕士生徐成凯进行汇报
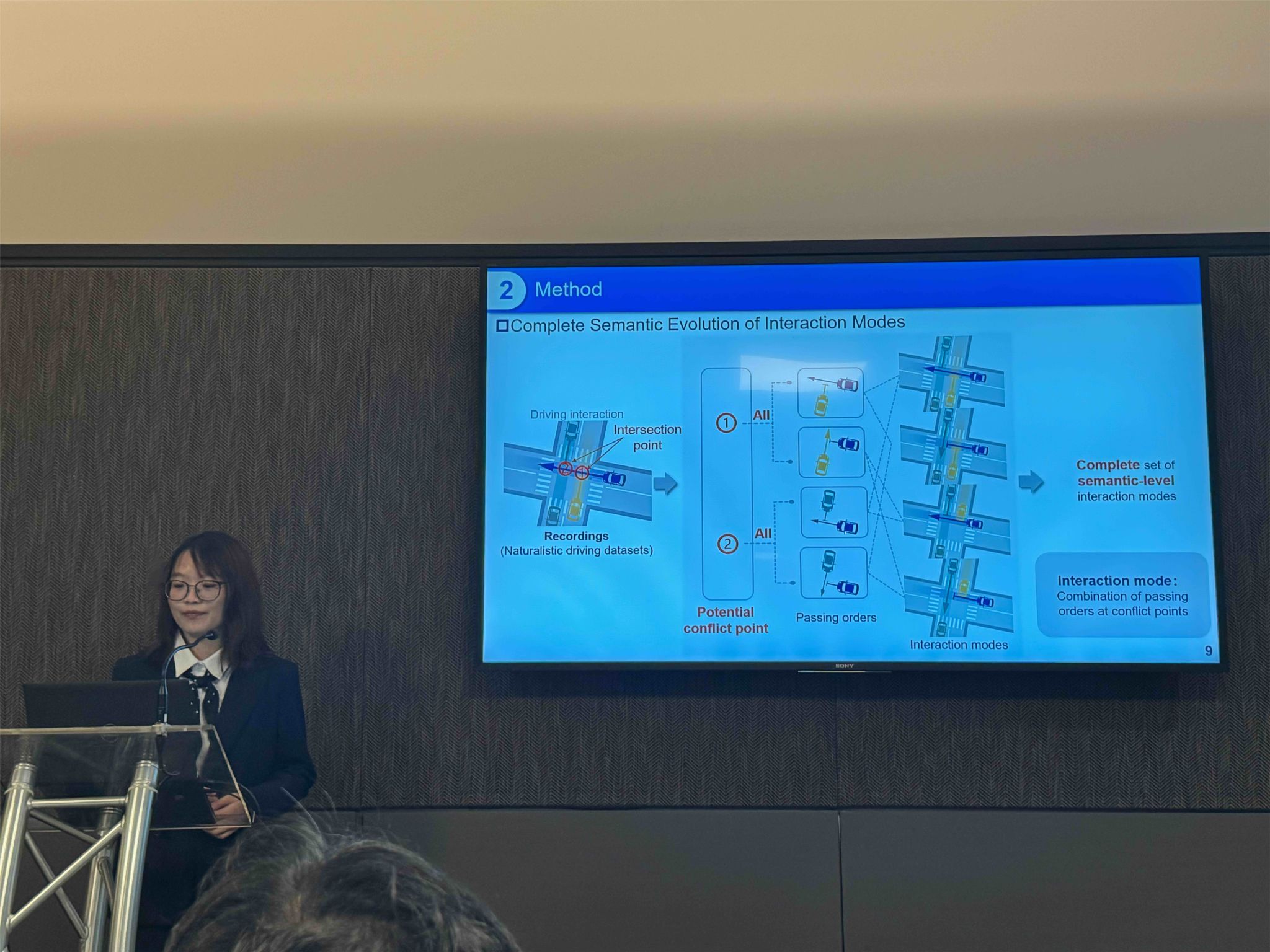
课题组博士生邱树涵在 “Innovative Applications of LLM in Multimodal Transportation Systems” Session 上对研究论文《Generalized Route Choice Modeling Via Fusion of Structural Knowledge and LLM-Inferred Context》进行了口头汇报,获得了现场学者的高度评价与认可。课题组博士生蒋溪彦在“Cooperative and Connected Autonomous Systems” Session 上对研究《Every Scene All at Once: Exhaustive Multi-Agent Interaction Generation with Controlled Diffusion Model》进行了口头汇报,通过提问交流收获到来自专家的反馈与研究建议。

课题组博士生邱树涵进行汇报
课题组博士生蒋溪彦进行汇报
本次 ITSC 2025 会议期间,课题组成员通过口头报告、互动交流等形式,系统呈现了在智能车队协同控制、弱势交通参与者安全防护以及以人为本自动驾驶架构设计等方向的一系列最新研究成果。与会专家对课题组在将多智能体强化学习、大语言模型与自动驾驶技术深度融合方面的持续探索给予了积极评价。

课题组成员合影
本次活动组织了以“From Interface to Intelligence: Human-Machine Interface 2.0 for Socially Compliant Autonomous Vehicles”为主题的Workshop,宣传推广Onsite 测试平台。
Workshop 由课题组博士后研究员梁浩阳老师及赵晓聪老师主持,邀请到 Prof. Tarek Sayed, Prof. Klaus Bengler, Prof. Shuo Feng 等国内外知名专家学者现场分享,现场座无虚席,三五成群地讨论,气氛积极活跃。
梁浩阳老师和赵晓聪老师进行了题为《An Introduction to OnSite Platform: Open Natural Driving Intelligence Automotive Simulation Test Environment》的汇报,推广宣传我们在推动自动驾驶测试技术方面的工作进展,引发多国学者提问与讨论。课题组博士生蒋溪彦受邀进行论文《Every Scene All at Once: Exhaustive Multi-Agent Interaction generation with Controlled Diffusion Model》的汇报,并与现场各国的学者深入探讨了技术细节与适用效果。

与 Prof. Tarek Sayed, Prof. Klaus Bengler 合影
课题组博士后研究员梁浩阳老师汇报 Onsite 平台

课题组博士后研究员赵晓聪老师组织Closing Remark

课题组博士生蒋溪彦进行汇报
Part 2:ITSC|海天相伴·城市与自然掠影
紧张的会议之余,课题组成员也走出会场,在海天之间、城市街区与原始丛林中感受“南方大陆”的独特气息,让这趟学术旅程在记忆中多了一份暖色滤镜。
2025年11月16日晚,我们搭乘夜班飞机从上海启程,飞越赤道,降落在初夏的澳洲大陆。

云端之下的澳洲大陆
首站悉尼,这座海港城市以其独特的现代活力迎接了我们的到来。在环形码头,举世闻名的悉尼歌剧院如同一组巨大的白色风帆,在蔚蓝海港的衬托下熠熠生辉,与不远处雄伟的海港大桥遥相呼应。我们打卡了毗邻的“最美车站”,在复古的站台与现代摩天大楼的交错视野中,定格了团队初抵澳洲的合影。海风拂面,不仅吹散了长途飞行的疲惫,更开启了这段充满期待的学术旅程。



悉尼风景
随后,我们飞抵本次ITSC 会议的举办地——黄金海岸(Gold Coast)。推开酒店窗户,绵延数十公里的金色沙滩与太平洋的壮阔波涛尽收眼底,天际线与海岸线在这里完美交融。


黄金海岸的海岸线
在紧张的学术日程之余,我们选择用 Citywalk 的方式深入探索这座城市的肌理。漫步于布罗德海滩(BroadBeach)的街头,海风中夹杂着咖啡的香气,随处可见身着冲浪服的行人和极具设计感的现代建筑,让我们切身感受到了这座海滨城市自由而闲适的节奏。为了更真切地体验当地生活,我们还深入探访了当地的大型商场与超市。走进琳琅满目的超市货架,宛如打开了一扇观察澳洲民生的窗口。大家饶有兴致地研究着货架上闻名遐迩的澳洲乳制品、色泽诱人的热带水果以及种类繁多的零食,在对比物价与品尝新奇口味的过程中,仿佛短暂地融入了当地居民的日常生活。在繁华的购物中心里,我们不仅感受了南半球商业的活力,也为亲朋好友挑选了心仪的伴手礼。这种“接地气”的探索,让我们对澳洲的社会风貌有了比书本和论文更直观的认知。
会议期间,我们还利用空闲时间探索了昆士兰州的双城魅力。
周四,我们前往距离黄金海岸仅一小时车程的澳洲第三大城市——布里斯班。这座“河流之城”展现出与黄金海岸截然不同的气质。我们漫步于布里斯班市政厅(Brisbane City Hall),这座建于1930 年的新古典主义建筑见证了城市的岁月变迁;在博物馆中,我们穿梭于历史的长河,通过一件件展品了解这片土地的前世今生。

博物馆

BRISBANE 字母牌
最令人难忘的体验莫过于夜探原始森林。远离城市的霓虹,我们深入幽暗的雨林深处,寻找澳洲独有的蓝色萤火虫(Glow Worms)。当手电筒熄灭,原本漆黑的洞穴瞬间变成了璀璨的“地下星河”。成千上万只萤火虫发出幽幽的蓝光,如梦似幻,仿佛置身于宫崎骏的童话世界。这份大自然的神奇馈赠,让习惯了数据与算法的我们,在静谧中感受到了生命的微光与震撼。
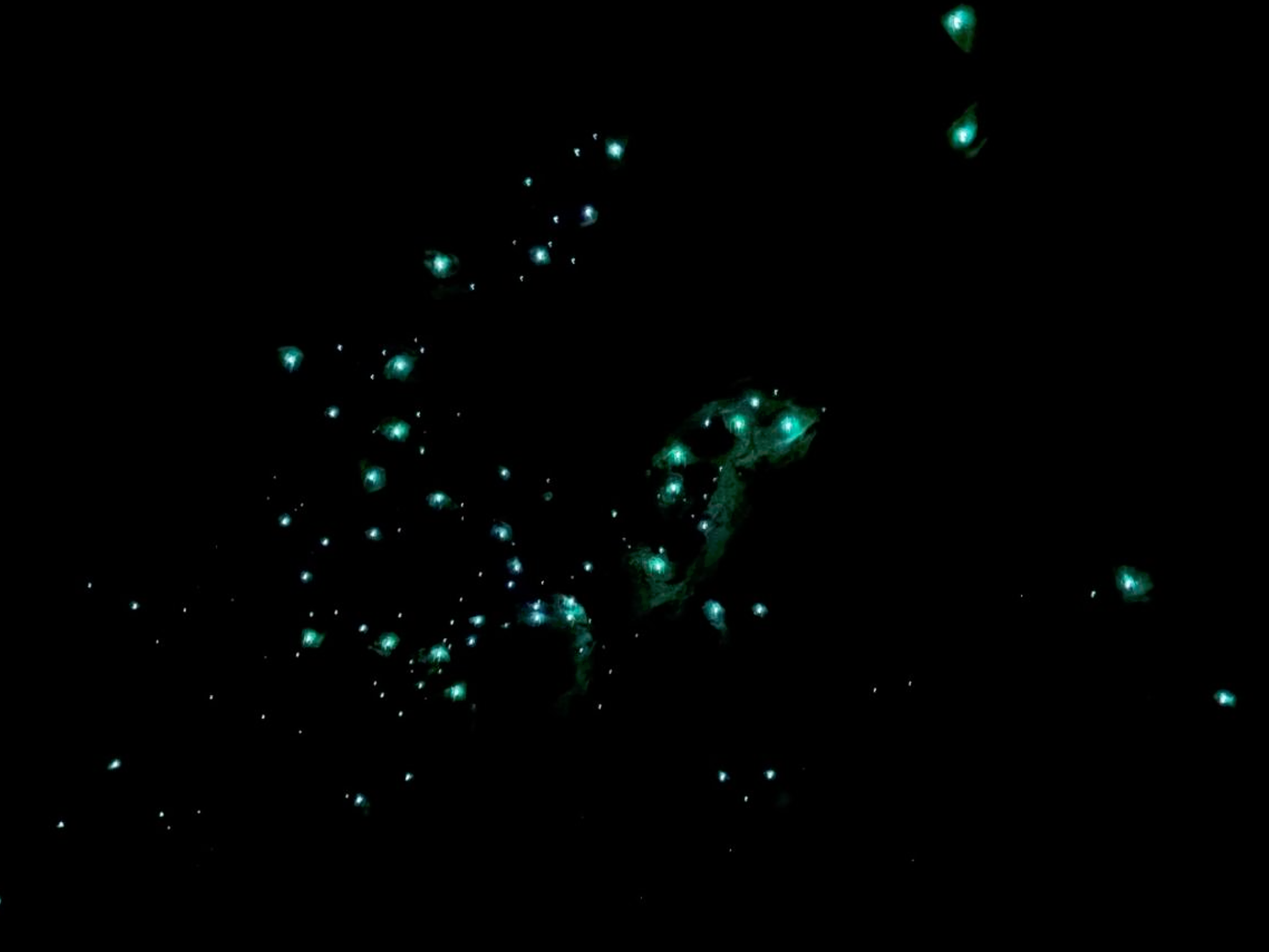
原始森林萤火虫
会议间隙,课题组成员选择探访黄金海岸久负盛名的可伦宾野生动物保护区(Currumbin Wildlife Sanctuary)。这里远非一个普通的动物园,而是一片坐落于郁郁葱葱天然丛林中的生命庇护所。成员们首先被每日上演的“野性的天空”自由飞鸟表演所震撼,目睹上百只鸟类在没有任何围栏束缚的露天剧场翱翔而过,切身感受到了对生命自由与天性的尊重。
当然,最令人难忘的莫过于与澳大利亚两大“国宝”的零距离接触。在袋鼠散养区,大家手持特制饲料,很快被温顺好奇的沙袋鼠们“礼貌包围”,它们用柔软的鼻吻轻触手掌,眼神纯净,一扫人们对其“拳击手”的刻板印象。而重头戏则是与考拉的相遇。这只毛茸茸的小家伙安静地环抱着树干,宛如一只活的毛绒玩具。当它缓缓转过头,用乌黑湿润的鼻子轻嗅空气时,所有成员的心都被瞬间融化,纷纷用镜头记录下这珍贵的“同框”时刻。据悉,保护区不仅是游客的天堂,其运营的可伦宾野生动物医院更是世界上最繁忙的野生动物医院之一,过去二十余年来已救助超过 14 万只野生生命。这让此次参观之旅,增添了一份对生命守护者的敬意与对可持续发展理念的深刻思考。

动物园里的考拉
本次行程的文化体验高潮,无疑是参加大会组织的晚宴,并集体观赏了澳洲特有的室内史诗级表演——《澳野奇观》(Australian Outback Spectacular)。这不仅仅是一场秀,更是一次全方位沉浸的澳大利亚内陆(Outback)文化之旅。
演出在一个可容纳千人的圆形剧场震撼开场。高科技的投影映射将整个穹顶和舞台瞬间变幻为广袤无垠的红土荒漠、深邃星空与奔腾河流。故事围绕两位在内陆挣扎求生的农场主夫妇展开,而真正的“明星”是超过 60 匹矫健的牧马、30 头壮牛、骆驼、牧羊犬甚至小猪组成的动物演员阵容。它们与技艺精湛的骑手、演员默契配合,再现了赶牛、套绳、抵抗干旱、社区互助等真实的历史与生活场景。马蹄声如雷鸣般在观众席间奔腾,尘土气息仿佛扑面而来,让人完全沉浸于这片土地的粗犷、坚韧与浪漫之中。
与演出同步进行的,是一场极具特色的“内陆晚宴”。在演出进行时,高效的服务团队在极短时间内为全场千名观众奉上了地道的三道菜大餐。菜品选用当地新鲜农产品烹制,一份香嫩的烤牛排,一份别致的素食餐点,味蕾与视觉享受同步达到顶峰。这种将地道美食与宏大叙事相结合的方式,让课题组成员在享受艺术震撼的同时,也深入理解了澳大利亚民族性格中勇于开拓、珍视社区的精神内核。

ITSC2025晚宴
尾声:在南半球续写智能交通新篇章
此次赴澳大利亚参加ITSC 2025 的跨国学术之旅,不仅让课题组成员有机会在国际顶级舞台上系统展示最新研究成果、聆听前沿观点,更在与不同文化、不同背景学者的交流碰撞中,激发出对智能交通与自动驾驶未来图景的更多想象。未来,课题组将继续围绕智能交通系统与自动驾驶中的关键科学问题,进一步加强跨学科交叉与国际合作,在保障交通安全、提升出行效率和优化人车交互体验等方面持续输出高质量研究成果,为智能交通技术的发展与应用贡献更多力量。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}