2025年11月26日,TOPS第172期组会于通达馆A102线下举行。本次组会由23级博士刘学凯、23级硕士肖灵坤进行《人机混驾环境下移动瓶颈车辆辨识与优化方法研究》、《考虑隐私保护的自动驾驶测试共享场景库查重问题研究》主题的学术报告分享。课题组全体老师同学出席了本次组会。

汇报时刻
刘学凯同学从研究背景与目标、研究现状、研究内容、预期成果与工作计划四个方面展开介绍。
在研究背景方面,刘学凯同学指出随着智能网联车辆技术的发展,人机混驾时代已经来临,交通系统正面临新型移动交通瓶颈的严峻挑战。这些瓶颈不仅表现为传统的慢车挡道,更出现了自动驾驶车辆不敢通行导致死锁或人类车辆不礼让智能网联车等复杂交互冲突,严重制约了道路的通行效率与安全。然而,现有的交通管控手段,如依靠地磁线圈、摄像头或无人机,大多仍处于粗放、经验化的阶段,无法实现对移动瓶颈进行实时、精准的单车智能管理与引导。
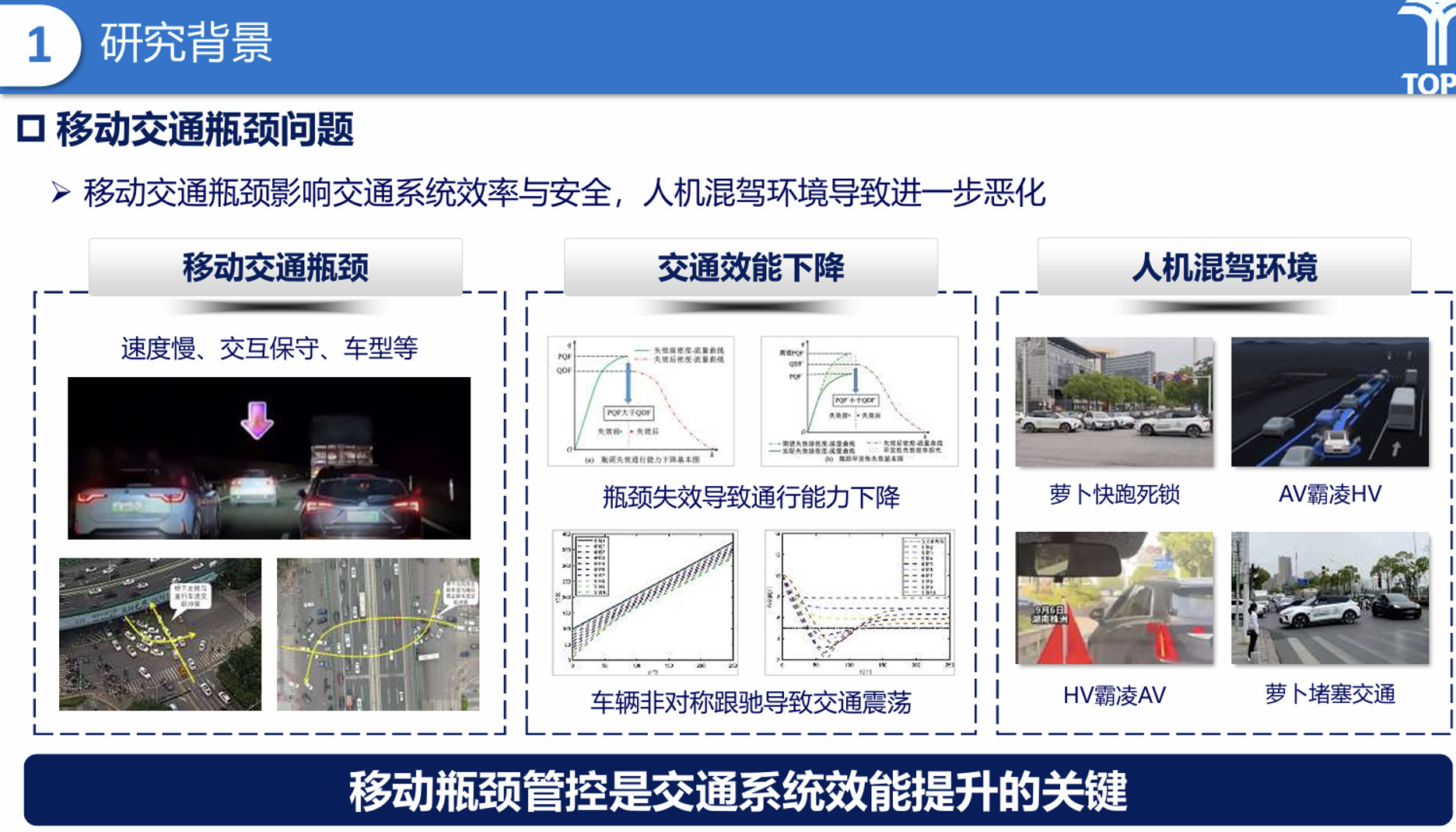
研究背景
为解决上述问题,刘学凯构建了一套从感知到决策的一体化智能管控体系。

研究目标
该研究首先致力于移动瓶颈的实时辨识,综合利用开源与自建的虚实融合数据集,提取交通场景中的视频光流、车辆轨迹以及由视觉语言模型解析的高层语义等多模态特征,通过图网络与多输入网络进行编码。为了精确量化瓶颈的严重程度,研究创新性地引入序数回归与分布正则化方法,并利用人类专家的价值偏好进行定序对齐,从而实现对不同交通场景下移动瓶颈的实时、可靠判别。在上述基础上,进一步深入诊断导致瓶颈的关键车辆。通过构建一个嵌入物理规律的交通系统效能世界模型,模拟交通流的自然演变过程,并引入反事实干预机制:在模型中替换特定车辆的驾驶行为,通过对比干预前后系统效能的变化,精确量化每辆车对瓶颈形成的责任程度,从而准确锁定关键致因车辆。为实现移动瓶颈的最终消解,本研究构建了一套异质车辆分层协同优化框架。该框架将场景中的车辆建模为具有不同协商特性的智能体,并依据其在协同引导过程中表现出的决策倾向识别其行为模式。通过构建交流网络,并借助大语言模型等形式化工具解析车辆意图,研究基于观点动力学模型推动异质车辆群体进行协商,最终通过共识算法生成协同运动方案,并由无人机等执行单元实施引导,从而形成系统最优的协同运动策略。
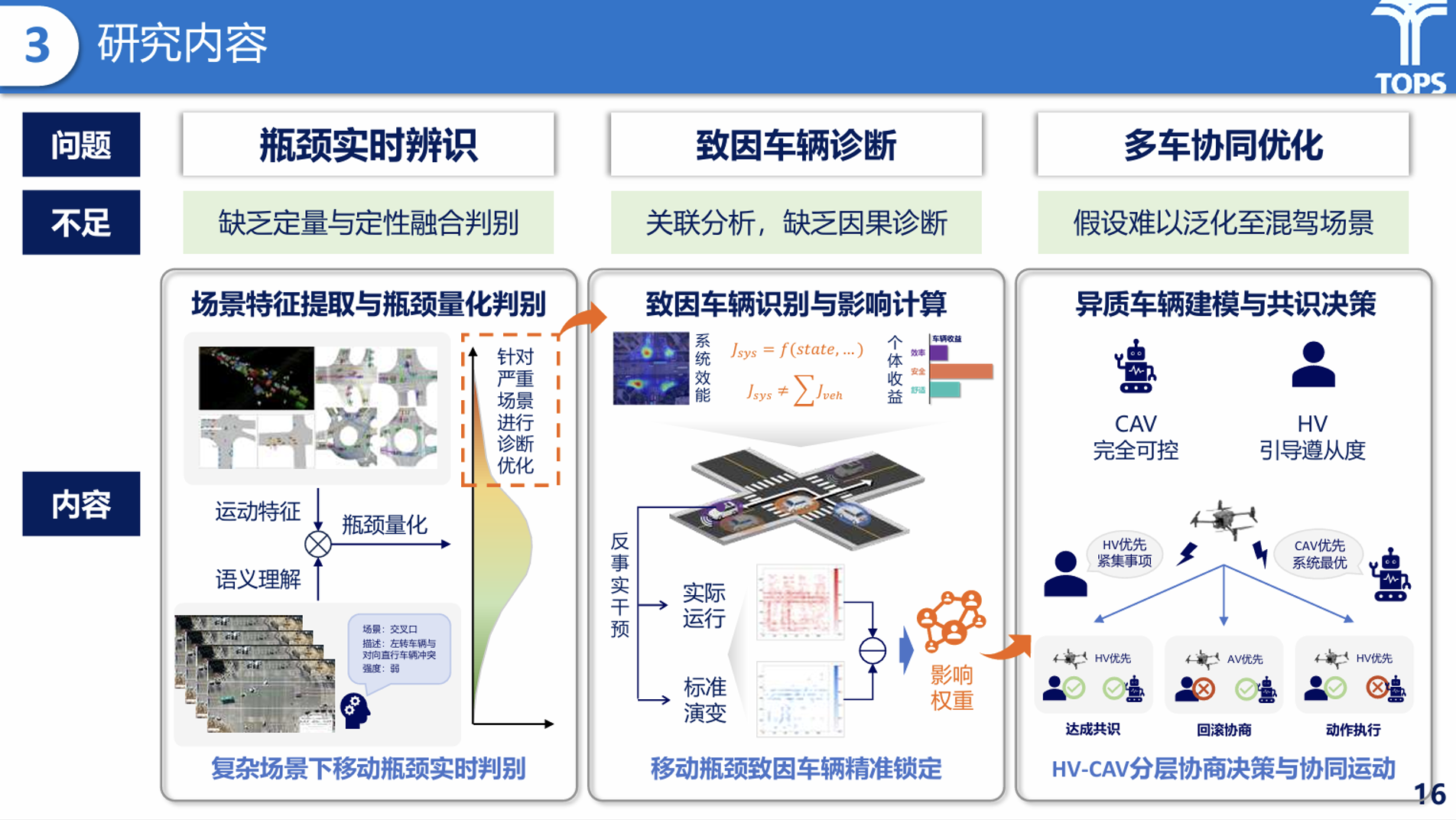
研究内容
汇报结束后,大家针对上述研究展开讨论。孙剑老师强调该研究应聚焦于无人机引导的协同优化,不能仅停留在瓶颈的识别层面,而必须深化对瓶颈严重程度的量化判别。主张从单车视角出发,结合移动瓶颈理论,基于真实轨迹数据集进行效能验证。石皓天老师则关注于HV的优化挑战,指出由于其不可控性,统一的优化策略难以奏效,建议针对不同车辆类型制定差异化方案。赵晓聪老师认为拥堵点的车辆并非都是致因主体。他建议研究应跳出传统框架,利用无人机快速定位,并致力于从源头识别出少数关键影响车辆进行协同。为应对研究前提与现实条件之间的差距,田野老师建议引入可靠的车辆类型识别技术。针对移动瓶颈理论可能存在的过度简化问题,他提出应在模型中纳入人、车、路、环境等多维要素的复杂交互机制。
接着肖灵坤同学从研究背景与现状、模型与方法、实验分析与验证、工作计划四个方面对她《考虑隐私保护的自动驾驶测试共享场景库查重问题研究》展开了介绍。

汇报时刻
研究背景部分肖灵坤同学指出在自动驾驶技术迅速发展的背景下,全面且高效的安全性测试成为保障智能汽车安全运行的关键前提。端到端自动驾驶模型依赖海量且非同质化的测试场景,而基于场景的虚拟仿真测试因其可定制、低成本和高安全性,逐渐成为主流的测试手段。然而,当前自动驾驶场景数据存在数据孤岛和资源浪费的问题,不同平台之间的数据格式不统一、难以互通,导致场景库质量参差不齐。虽然场景数据共享为构建高质量场景库提供了新思路,但随之而来的是对数据隐私与知识产权的保护需求。现有数据共享机制中常见的隐私保护技术如同态加密、安全多方计算、联邦学习和差分隐私等各有优缺点,如同态加密支持密文计算但计算开销大,安全多方计算无需可信第三方但通信成本高。目前,针对自动驾驶场景相似性度量的研究主要集中在基于时序轨迹分析、图结构建模和深度学习特征提取等方法,但在考虑隐私保护的场景相似性度量方面仍属空白。因此,如何在保护隐私的前提下实现场景数据的高效查重,成为推动共享场景库可持续发展的核心问题。

研究背景
该研究为解决隐私保护下的场景查重问题,设计了一套完整的计算框架。其核心方法为对场景动态层的深度特征提取,此研究摒弃了初期使用的、但效果不佳的自编码器方案,转而采用了一种基于交互关系的语义化表征路径。即它首先定义了以主车为中心的三大类十一小类精细交互关系,进而将整个场景构建为一个包含节点、交互边和时间超边的自车中心多主体交互图,以系统刻画交通参与者之间的时空交互演化。接着研究提出了一个STGT模型,通过三元组度量学习对该交互图进行嵌入训练,从而生成一个定长的、语义丰富且易于比较的场景特征向量。在加密与查重阶段,该特征向量通过同态加密技术被转换为密文,并直接在密文空间中与场景库中的其他加密特征进行相似度计算。
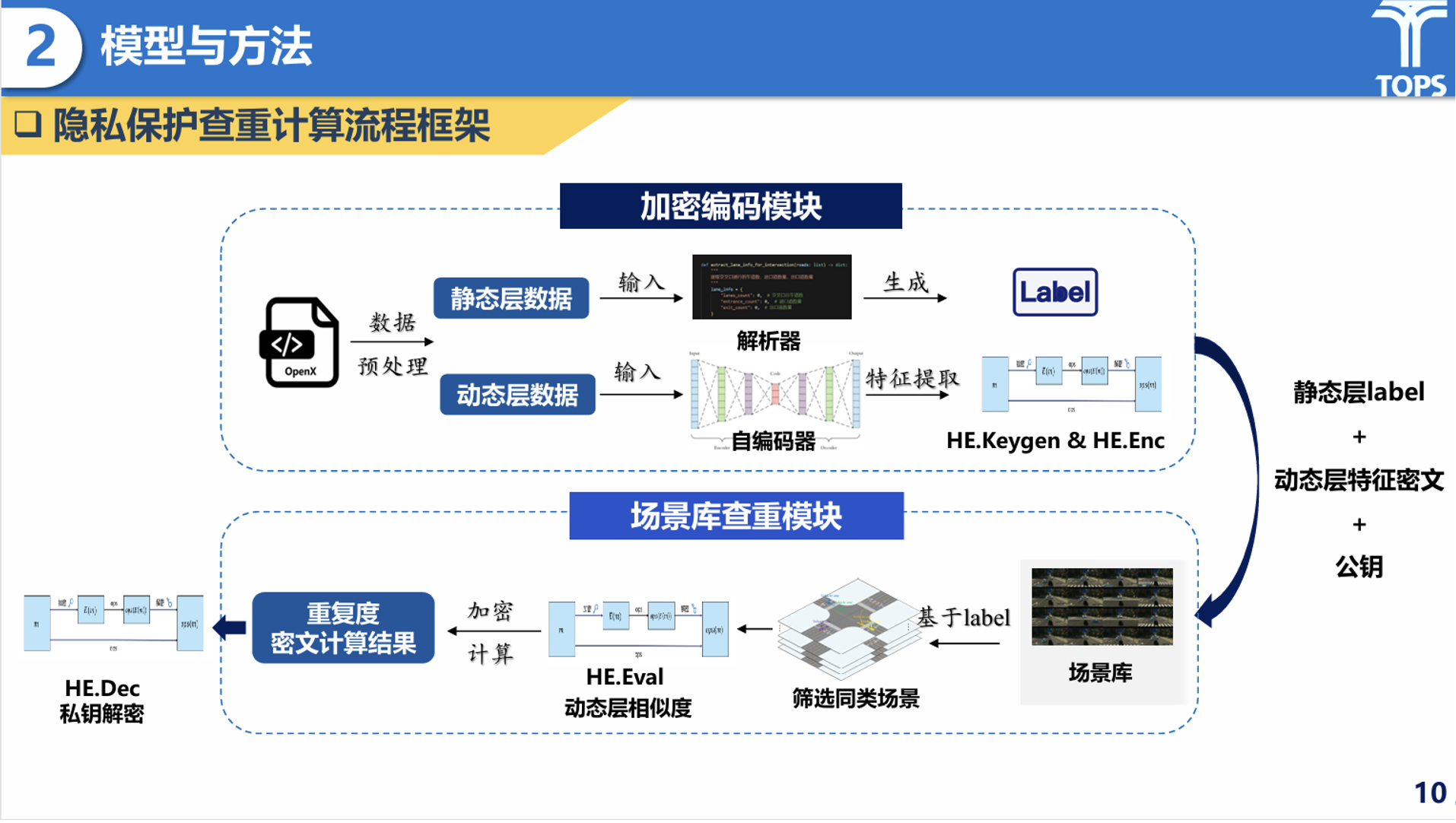
研究方法
最后研究通过系统实验对提出方法进行了全面验证。模型训练阶段,基于人工标注的1142对三元组数据对STGT网络进行训练,并设计了消融实验。结果表明,若移除时序模块、类型聚合或几何偏置等关键设计,模型性能均会出现显著下降,从而验证了整体架构中各组成部分的有效性。并将STGT模型与初期采用的自编码器方法在相同样本集上进行了对比。结果显示,STGT所提取的特征嵌入能够将最相似场景的匹配分数从自编码器的约36%提升至91%以上,且生成的相似度分布更具区分度,充分证明了其在场景相似性度量方面的优越性能。最终研究完成了密文查重的闭环验证,实验表明,密文域下的相似度计算结果与明文结果高度一致,误差控制在10⁻⁷量级,同时计算效率较自编码器提升了约16.8倍。这一结果充分验证了所提出的隐私保护查重框架在保证精度的同时,具备良好的可行性与高效性。
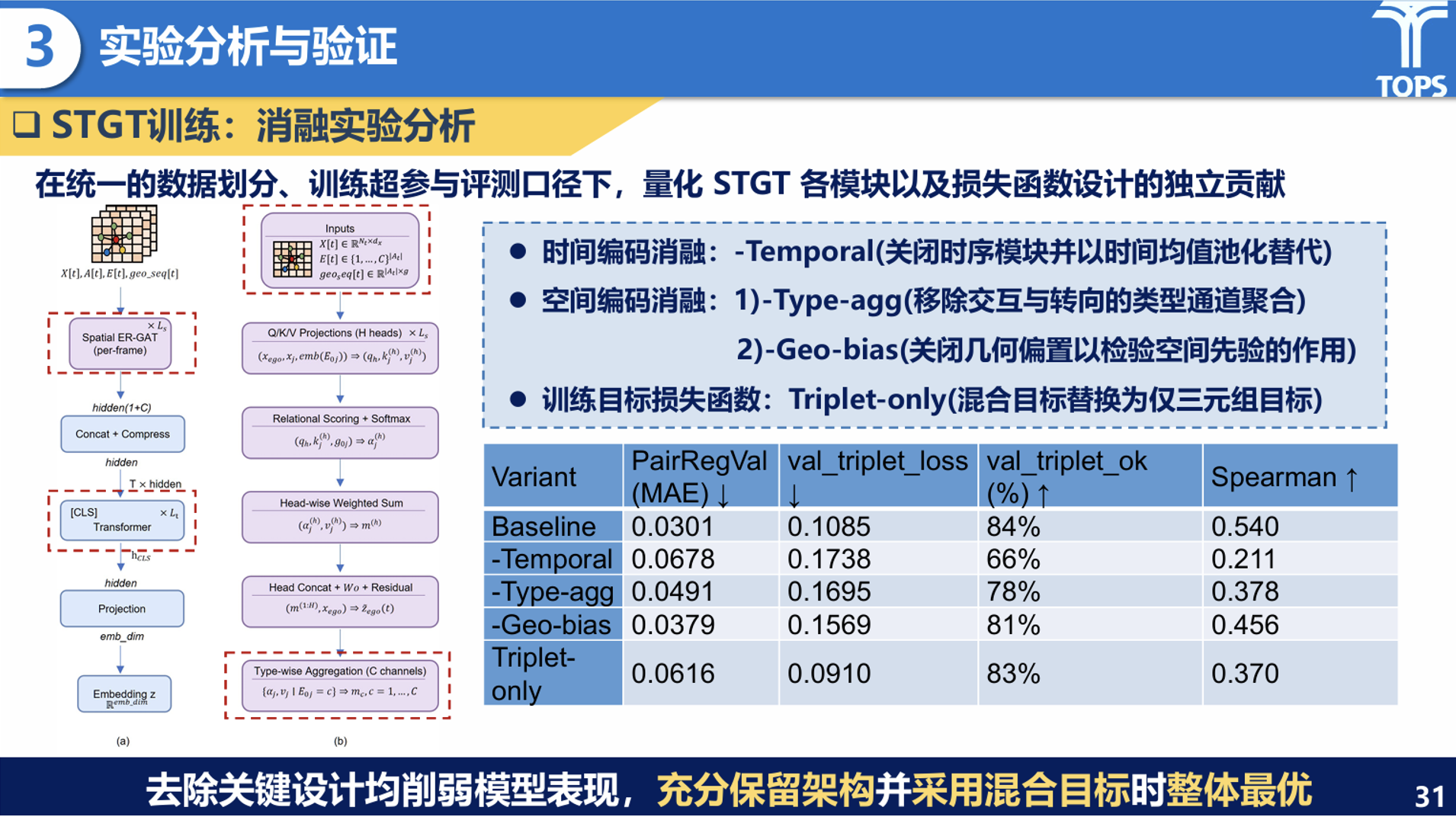
实验验证
在肖灵坤同学分享后,与会师生展开了深入探讨。张家锐同学建议,可探索在节点标记中融入更多关键运动参数,以提升模型在新视角与场景下的泛化能力。秦国阳老师则指出,当前为适配同态加密而将流程解耦为嵌入与相似度计算两步,可能存在信息损失,未来或可研究能直接输出相似度的端到端方案。此外,孙杰老师在肯定同态加密思路的同时,建议通过与其他隐私保护技术的对比实验,进一步明确本方案的具体优势与改进效果。整场会议在浓厚的学术氛围中圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}