TOPS课题组孙剑教授研究团队研究成果《自动驾驶汽车虚实融合测评技术与系列装备》获SAE汽车智能交通技术创新奖一等奖(唯一)。

孙剑教授团队成果获SAE汽车智能交通技术创新一等奖
“SAE汽车智能交通技术创新奖”由SAE International设立颁发,旨在推动前瞻学术研究与实际产业需求的双向融合,为智能交通领域的高质量创新提供持续动力,推动学术研究与产业需求的双向赋能。
不同于人类驾驶汽车,自动驾驶人机耦合智能的特性给测评技术带来颠覆性变化,由此带来三个挑战:
1) 自动驾驶系统需要应对开放交通的无限多样,但存在场景要素多,采集精度低,且海外场景禁止采集等的问题,需要解决现有测试场景少的挑战;
2) 要比肩人类驾驶,自动驾驶需要百亿公里的道路测试。仿真成为主要测试手段,然而仿真工具被国外垄断,且功能性能不足,需要解决仿真工具缺的问题;
3) 此外,自动驾驶产品需要全生命周期测评优化,且智驾系统高频更新,要求显著缩短测试周期,需要解决测评效率低的问题。

自动驾驶测评技术三大挑战
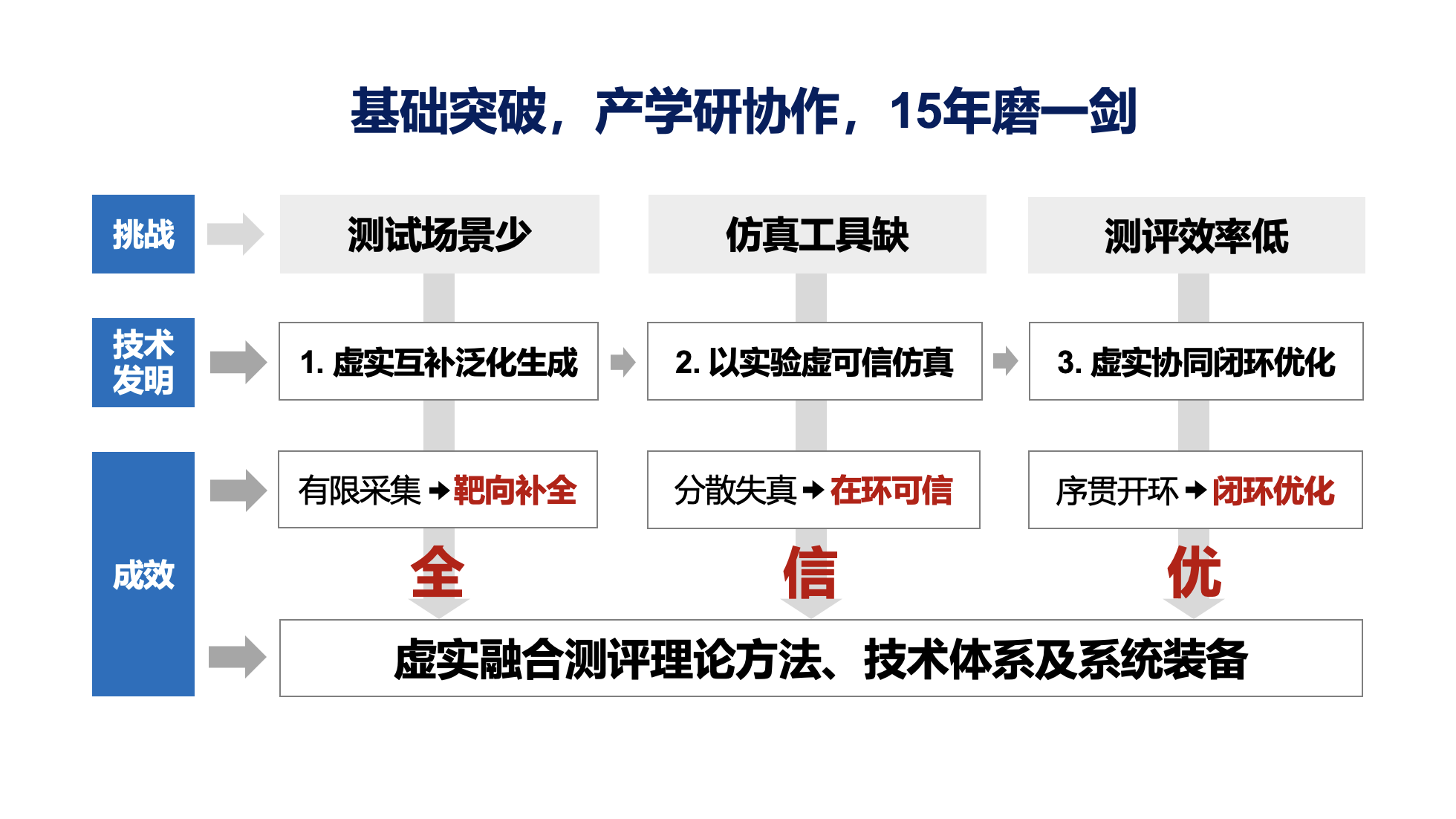
针对以上三大挑战,研究团队15年来基础突破、产学研协作,构建自动驾驶测评技术体系。
在技术创新方面,提出了虚实互补泛化生成、以实验虚可信仿真、虚实协同闭环优化三大关键测评技术,实现了测试场景从有限采集到靶向补全、测试工具从分散失真到在环可信、测试流程从序贯开环到闭环优化的三大突破,形成了虚实融合测评理论方法、技术体系及系统装备。
虚实融合测试测评理论
基于国家自然基金、国家重点研发计划等20余项国家级项目资助,与华为、百度等头部企业联合实验室 产学研协同攻关,团队突破场景智能化生成、可信交通流仿真、加速测试优化、驾驶能力评价等全栈测试技术,服务超70%头部企业。并在国家自然科学基金委、中国汽车工程学会指导下,打破国外垄断,建设国内首个自动驾驶测试公共服务平台Onsite,场景共建共享、开发环境敏捷、测试部署轻量化、评测透明可信,自主研发自动驾驶测评成套装备,形成自主可控完整测试工具链。研究成果获得广泛认可。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}