2025年9月17日,TOPS第169期组会于通达馆A211线下举行。本次组会由21级博士房世玉、特别邀请的贵州大学现代制造技术教育部重点实验室的石晴老师和西南交通大学智慧城市与交通学院的嵇昂老师分别进行《CoReVLA:基于接管采集与偏好对齐的端到端自动驾驶方法研究》、《基于部分扩散模型的测试场景生成方法》、《面向协同自动驾驶的异质多智能体决策机理与方法研究》主题的学术报告分享。课题组全体老师同学出席了本次组会。

汇报时刻
会议首先由博士生房世玉作报告。他从研究背景、核心方法、实验结果和总结展望四个方面,系统介绍了其团队在端到端自动驾驶领域的最新成果——CoReVLA模型。
研究内容
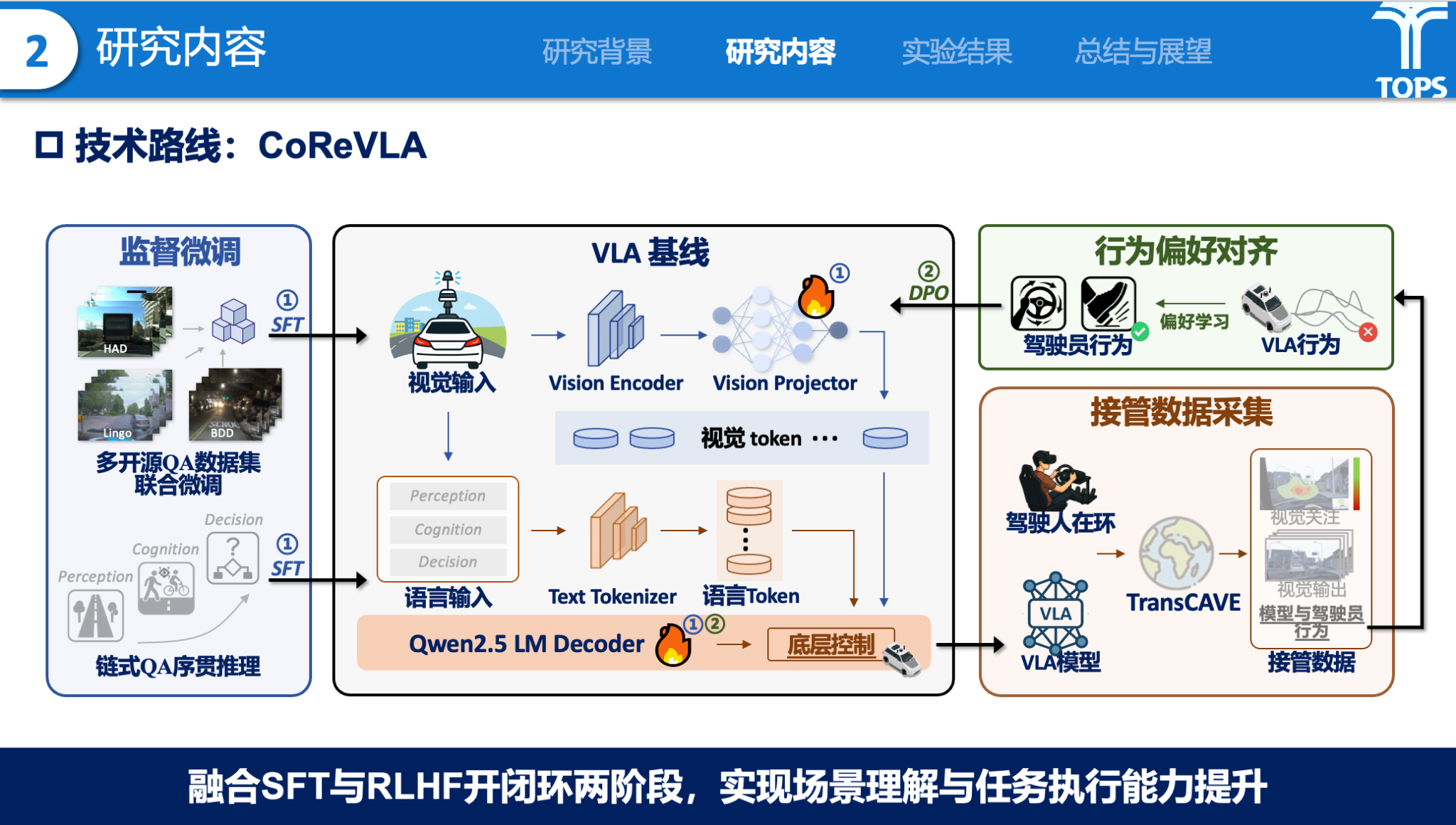
在研究背景方面,房世玉首先分析了当前端到端自动驾驶的技术路线,指出模仿学习虽实时性好但样本依赖性强,而大模型方法虽泛化能力强但响应速度慢。现有方法普遍在长尾场景下表现不佳,缺乏零样本知识迁移能力,而这正是大模型的生成式推理能力可以弥补的短板。

研究内容
为此,他提出的CoReVLA模型创新性地结合了“接管采集”与“偏好对齐”两大核心思想。该方法利用沉浸式测试平台,通过人类反馈强化学习(RLHF)来高效优化模型性能。他详细展示了CoReVLA模型的整体架构,该架构能有效融合视觉与文本输入,并通过两阶段微调方法进行训练。

研究内容
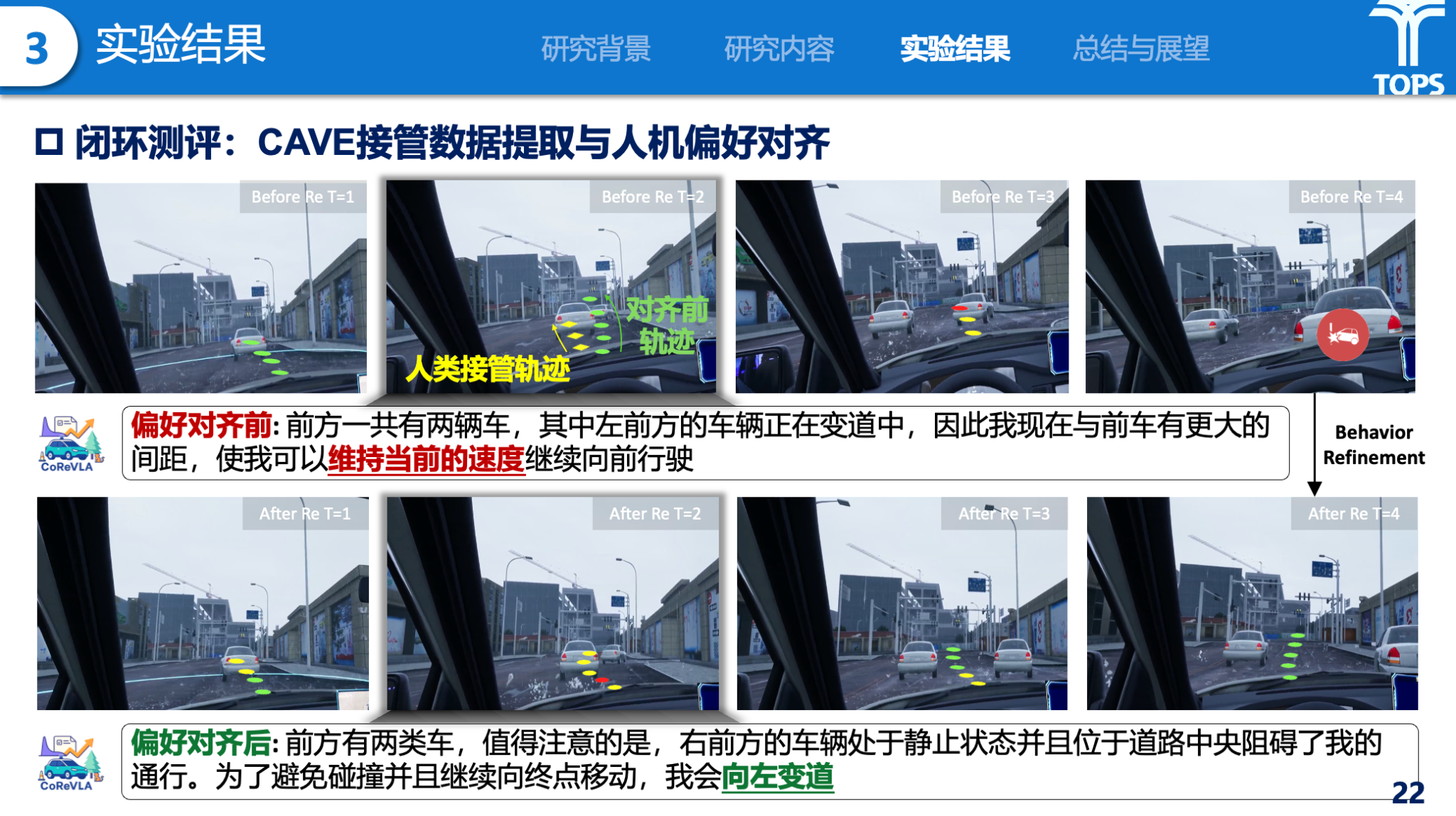
研究结果表明,他提出的方法在开环测试中,CoReVLA在三个公开数据集上的场景理解和任务执行能力均超越了现有基线方法。在Transport平台进行的闭环测试中,模型通过学习人类专家的驾驶演示,在成功率和安全性上取得了显著提升,并在多个长尾场景中表现出强大的泛化能力。
研究内容
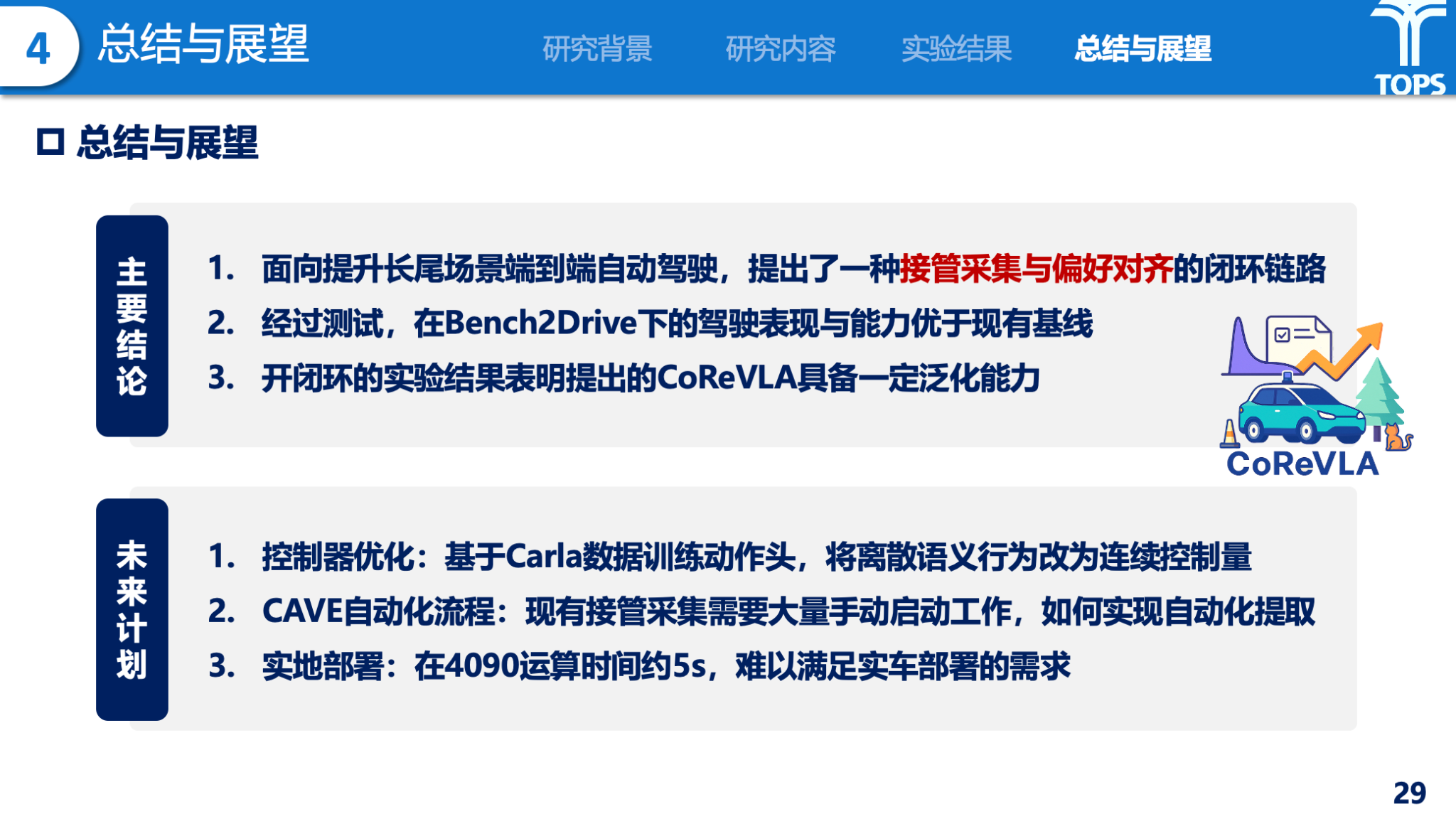
总结展望中,房世玉总结道,该研究为解决端到端自动驾驶在长尾场景下的难题提供了有效途径。未来,团队将聚焦于自动化数据采集、模型的高效部署以及提升驾乘舒适性等方向。
研究内容
在提问环节,房世玉就模型的网络结构细节、训练数据集的选择与分类等问题,与在场师生进行了深入交流。
汇报时刻
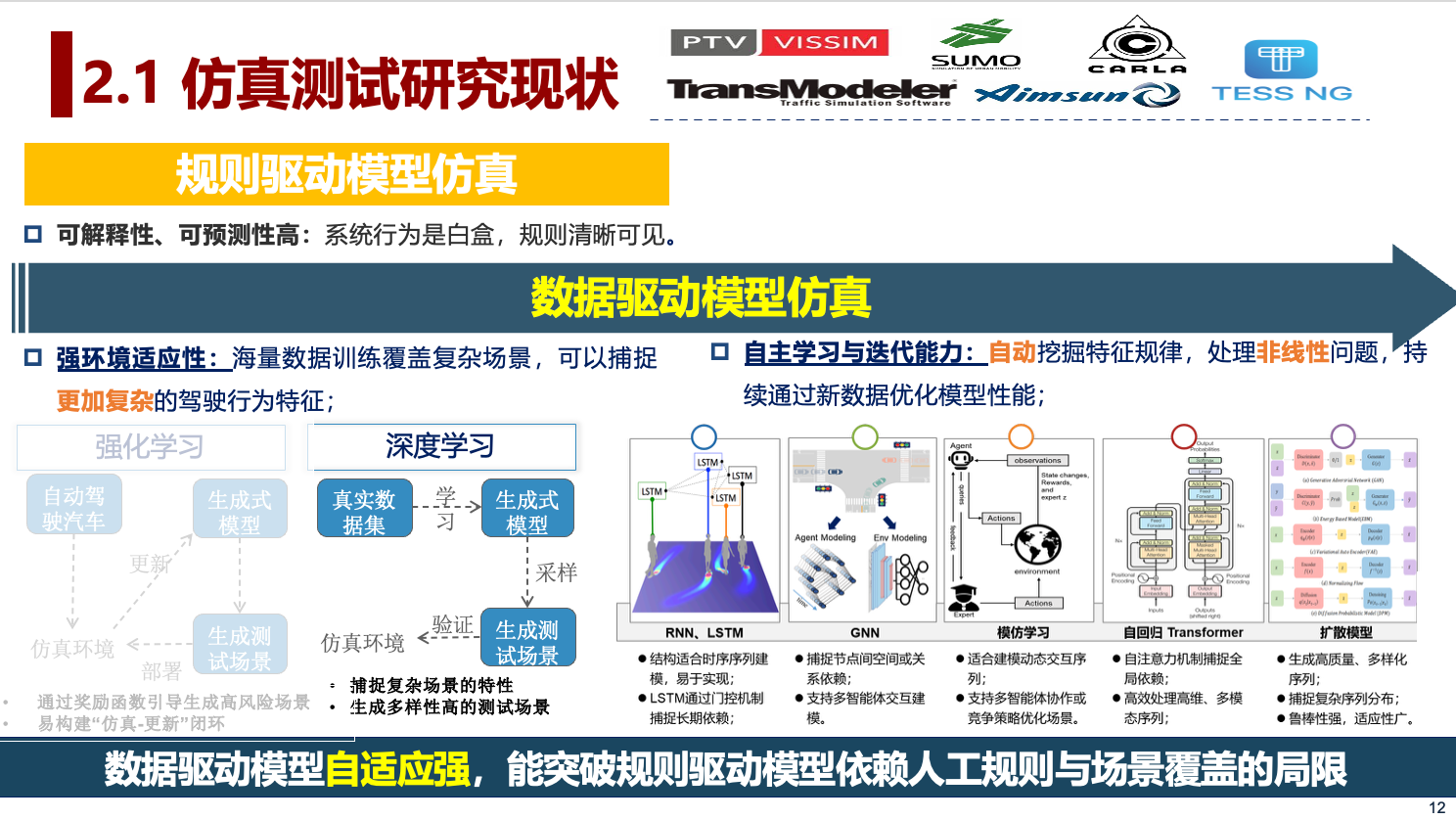
接着,来自贵州大学的石晴老师围绕团队介绍和已开展工作两个方面对她的研究《基于部分扩散模型的测试场景生成方法》展开介绍。
研究内容
石老师首先简要介绍了其团队的研究方向,涵盖了非结构化道路感知、异构智能体环境感知以及人机共驾安全控制等领域。
研究内容
报告的核心是团队近期在仿真测试领域的探索。她详细介绍了如何运用数据驱动的思路,将部分扩散模型(Partial Diffusion Models)应用于测试场景的生成。该方法通过引入多约束目标函数,能够生成更加真实且具有挑战性的测试用例。
研究内容
一个突出的亮点是,团队尝试采集并处理驾驶员在紧急规避、人机干扰等场景下的生理信号(如脑电、心率等),并探索如何将这些信号特征融入价值函数,从而生成更贴近人类驾驶员认知与行为特性的高价值测试场景。最后,她强调了从仿真到现实的迁移与验证工作的重要性。

汇报时刻
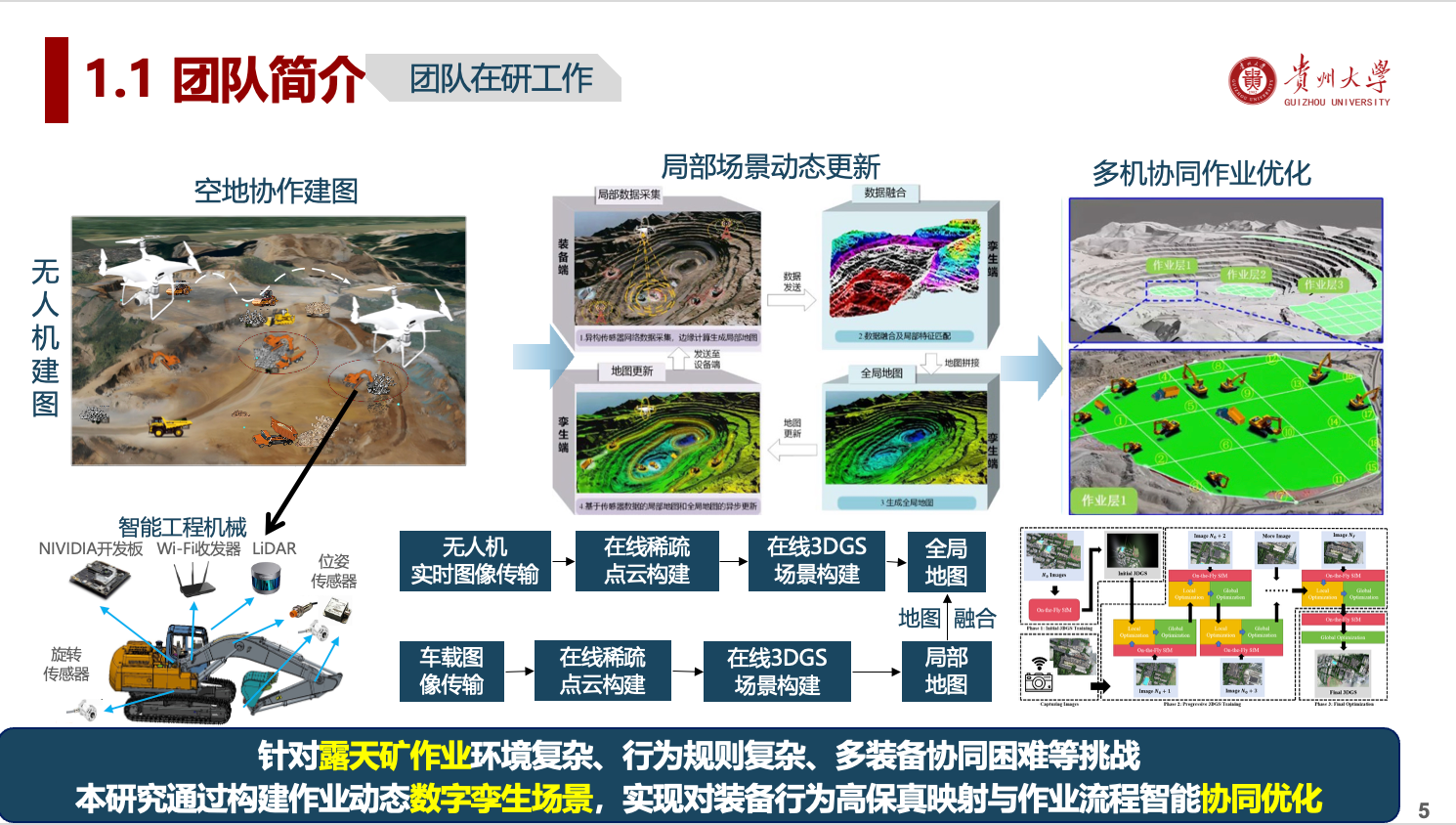
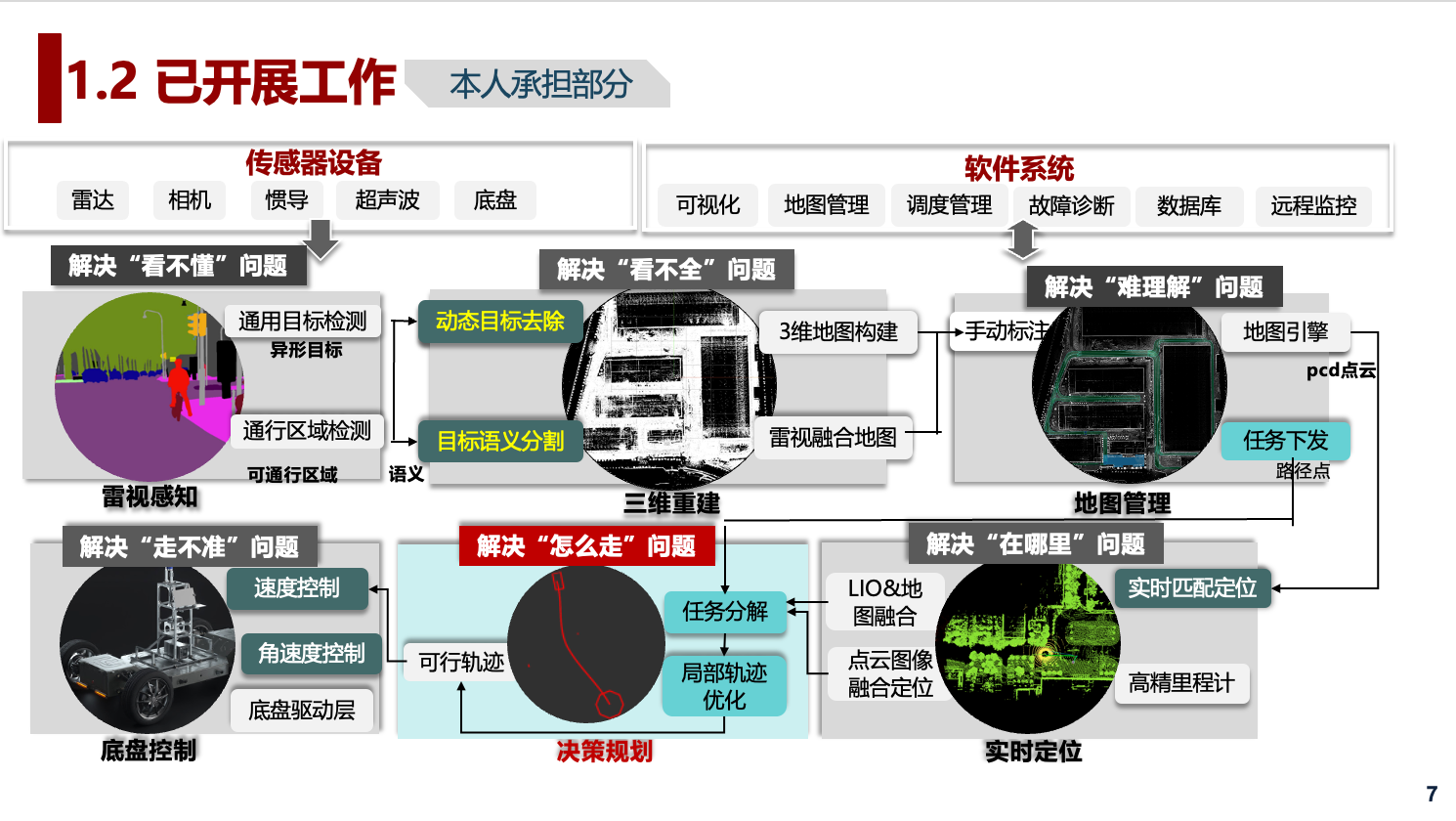
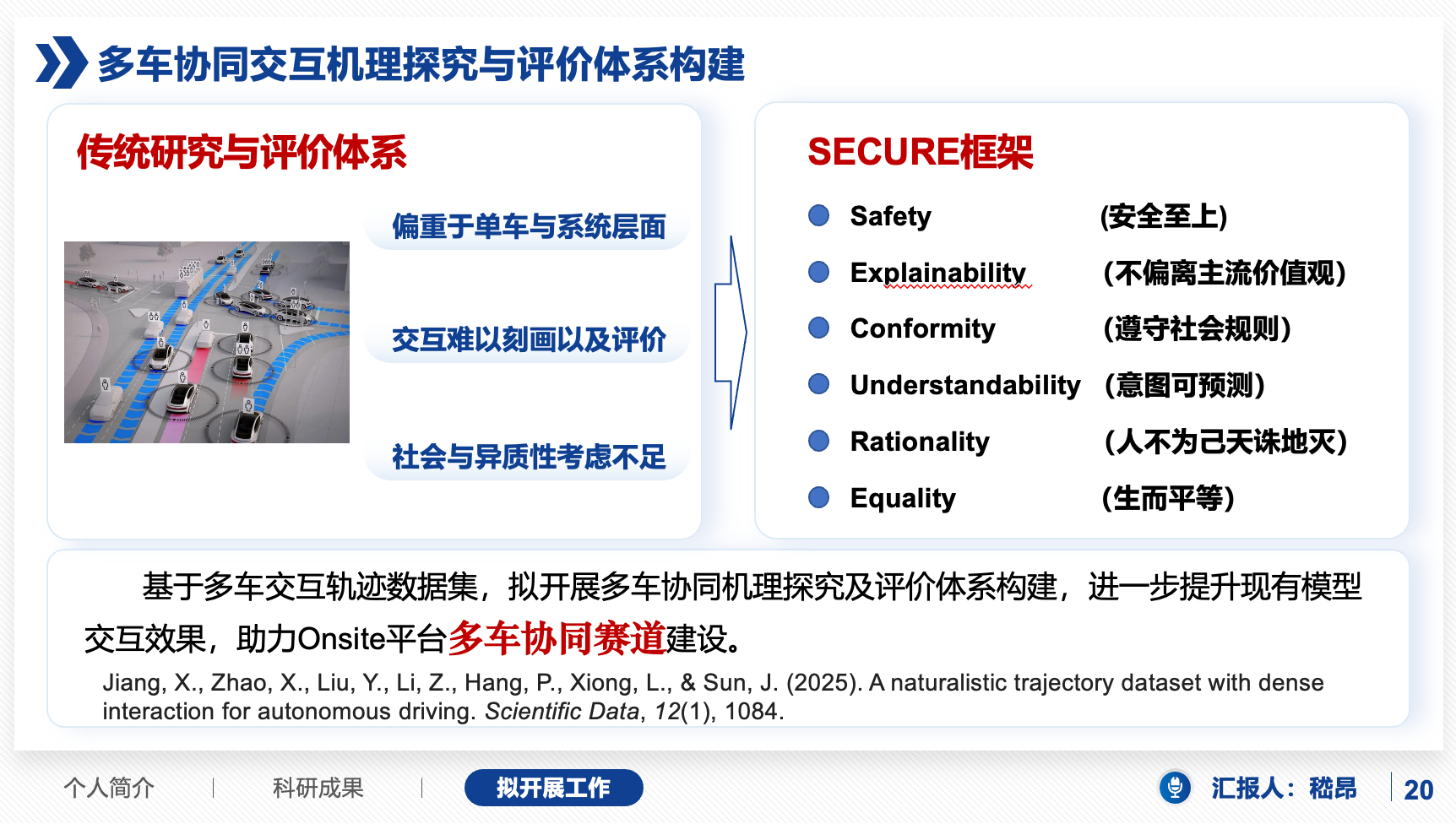
最后,来自西南交通大学的嵇昂老师围绕个人简介、科研成果和拟开展方向等三个方面对他的研究《面向协同自动驾驶的异质多智能体决策机理与方法研究》展开详细介绍分享。

研究内容
嵇老师首先与大家分享了他与TOPS课题组的深厚渊源,回顾了过去在此交流学习的宝贵经历。他的研究方向聚焦于多车交互机理、自动驾驶决策优化和仿真平台算法测试,综合运用博弈论、强化学习与交通仿真技术,深入研究智能网联环境下的多车协同策略。
研究内容
研究成果上,他重点介绍了一项基于共享知识库的分布式多智能体协同汇聚研究。该研究通过构建离线共享信息池,探索了“集中训练、分布执行”等多种高效协同范式,为解决异质车辆间的决策难题提供了新思路。

研究内容
展望未来,嵇老师计划在多车协同交互机理的深化、科学评价体系的建立以及仿真到现实的高效迁移等关键问题上继续展开研究,力求推动协同自动驾驶技术的实用化与可靠性。
研究内容
本次组会内容充实,三位报告人的分享既有深度又有广度,为课题组师生带来了新的启发与思考。会议在浓厚的学术氛围中圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}