2025年4月16日,TOPS第160期组会于通达馆A102线下举行。本次组会由清华大学自动化系的李力教授带来题为《自动驾驶汽车的终身学习和测试》讲座。课题组全体老师同学出席了本次组会。

汇报时刻
李老师讲了对智能测试的理解、场景的分类与重构、场景的覆盖性测试,以及挑战性场景的寻找等内容。
讲座标题
研究背景部分提到如何检测无人驾驶汽车的能力,是否已经达到安全性的要求,是现在研究的热点之一。

研究内容
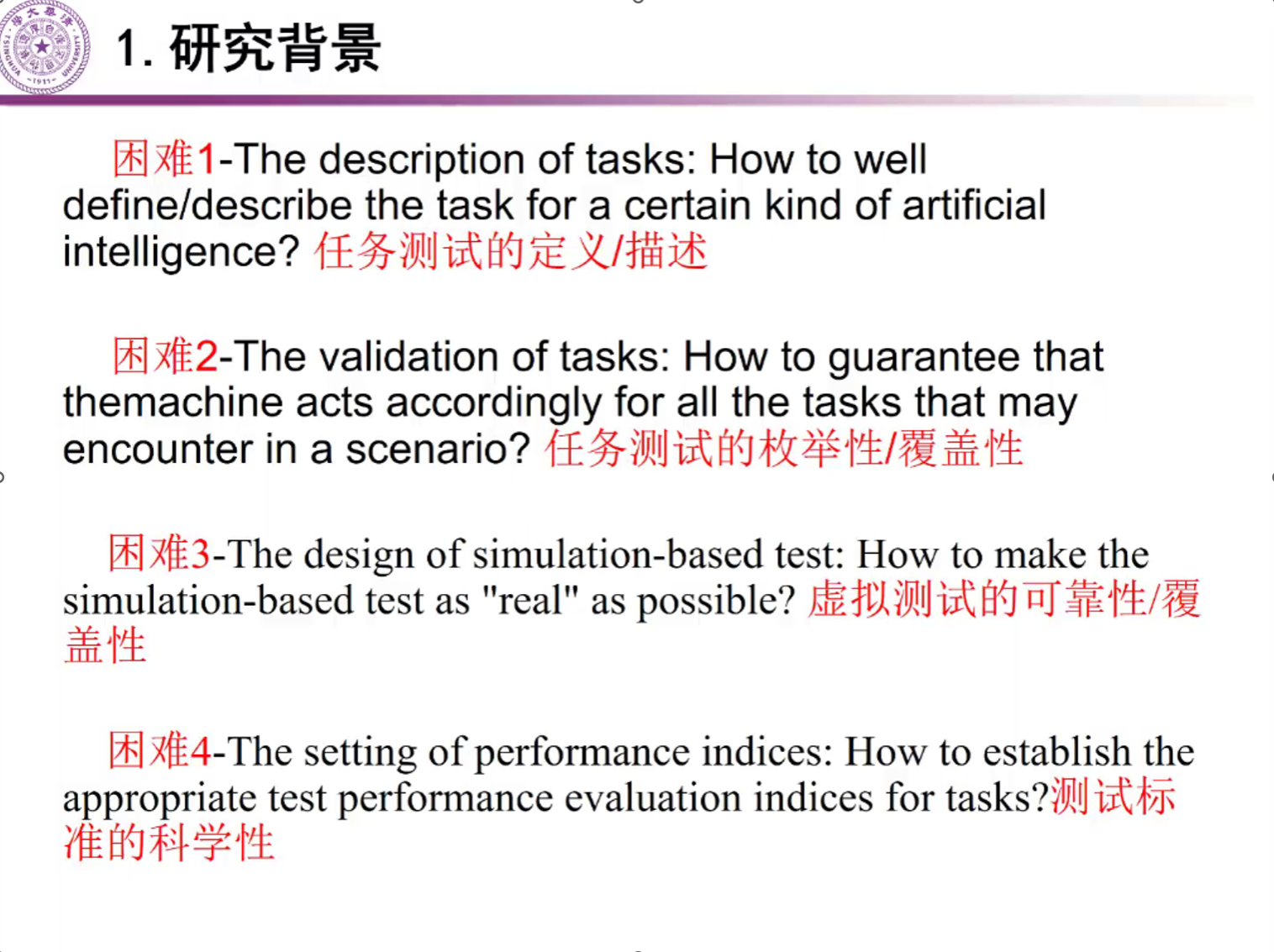
随后,李老师谈及现在的智能测试是以任务为驱动,以场景为主要特征的智能定义与智能设计的过程。并且,以4个困难,进行展开论述,分别为任务测试的定义与描述、任务测试的枚举性与覆盖性、虚拟测试的可靠性与覆盖性和测试标准的科学性。
研究内容
接着,李老师进一步讲解如何借鉴人工智能的成功案例,设计特定场景和任务,使得人类能够衡量智能驾驶的水平。

研究内容
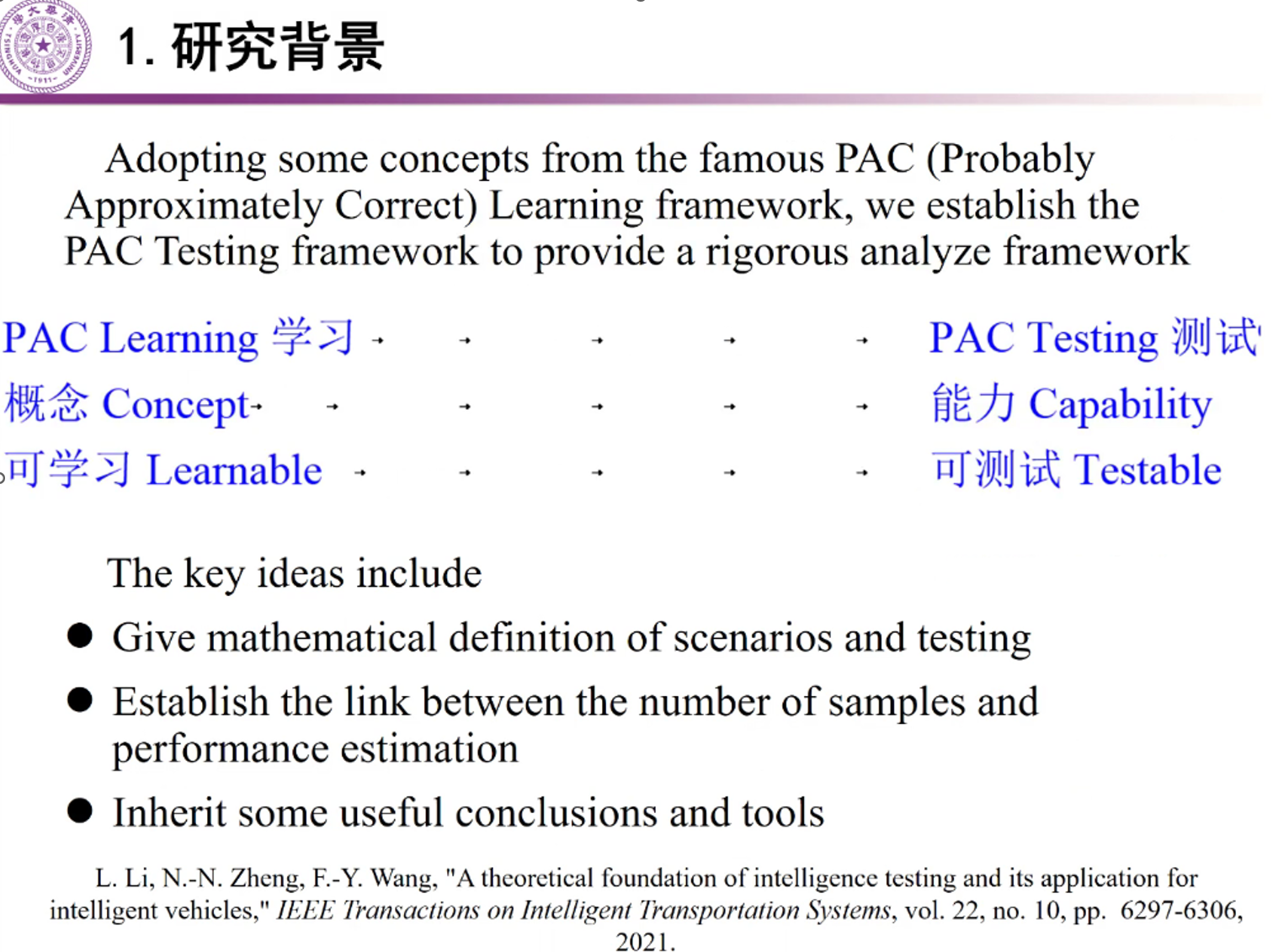
然后,从传统的PAC学习理论来讨论无人驾驶可测试性的步骤。并且,从PAC理论得到启发,即智能汽车是可测试的。接着,提出了虚拟测试要做好的两个要求:一是虚拟物的内在表现要真实,二是虚拟物的外在表现要丰富。
研究内容
最后,会议进入问答环节。梅月雯对在场景空间参数化时,如何把主车学习纳入终身学习框架中,让场景更危险提出了问题并进行讨论。张赫对关键场景加速搜索问题和空间栅格化目的进行了提问与讨论。刘佳琦对AI发展进入下半场时,大语言模型快速迭代对构建小算法的意义进行了探讨。叶轶淳对时序场景参数化后,欧几里得距离相近是否还能被认为是等效的等问题进行讨论。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}