2025年3月6日星期四下午,TOPS第157期组会于通达馆A102线下举行。本次组会由21级博士张小卉带来自己的研究进展汇报,与大家交流讨论《数据驱动下的混合交通流随机基本图建模与分析》的相关内容,课题组全体老师同学出席了本次组会。

汇报时刻
该研究针对自动驾驶汽车(AVs)与人工驾驶汽车(HVs)的混合交通流问题,提出数据驱动的随机基本图(SFD)建模框架,为未来智能交通系统设计与政策制定提供了科学依据。
研究内容
汇报内容主要从研究背景、随机基本图建模、基于Waymo数据集案例研究和实验结果分析四个部分进行展开。
混合交通流建模面临双重挑战
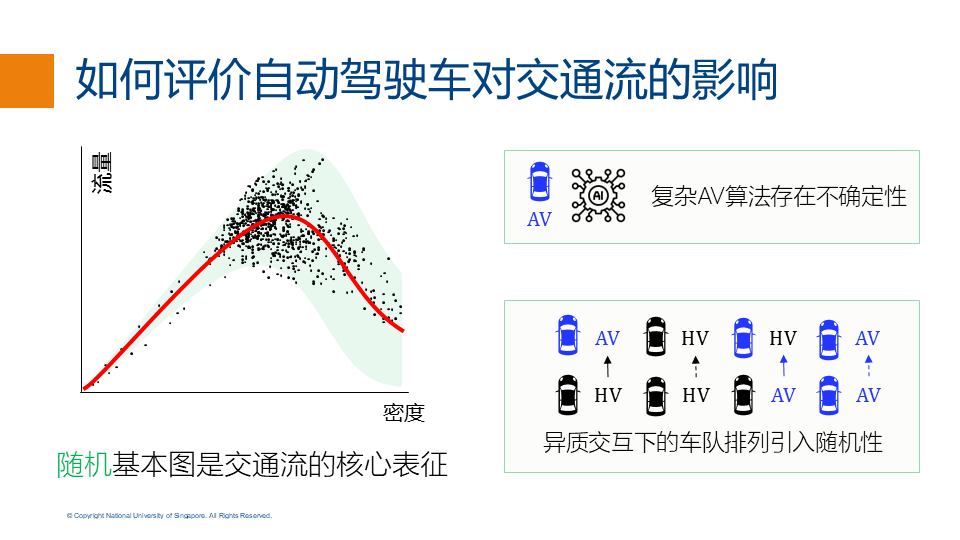
随着自动驾驶技术加速落地,AV与HV的混合交通流已成为城市道路的常态。然而,现有研究普遍存在两大局限:一是过度依赖理想化假设(如简化车间距或特定跟驰模型),二是忽视真实交通流的随机性特征,导致模型预测与实际情况偏差较大。此外,尽管全球已积累海量AV轨迹数据,但学术界对其挖掘仍显不足。
"传统模型难以捕捉混合交通的复杂动态,比如不同车辆组合(HV-AV、AV-HV等)的交互行为差异,以及AV渗透率变化对通行能力的非线性影响。"张小卉同学在报告中指出,"我们的目标是将真实数据融入建模核心,构建一个可量化评估AV影响的概率框架。
研究内容
创新方法:从数据中学习交通流的随机本质
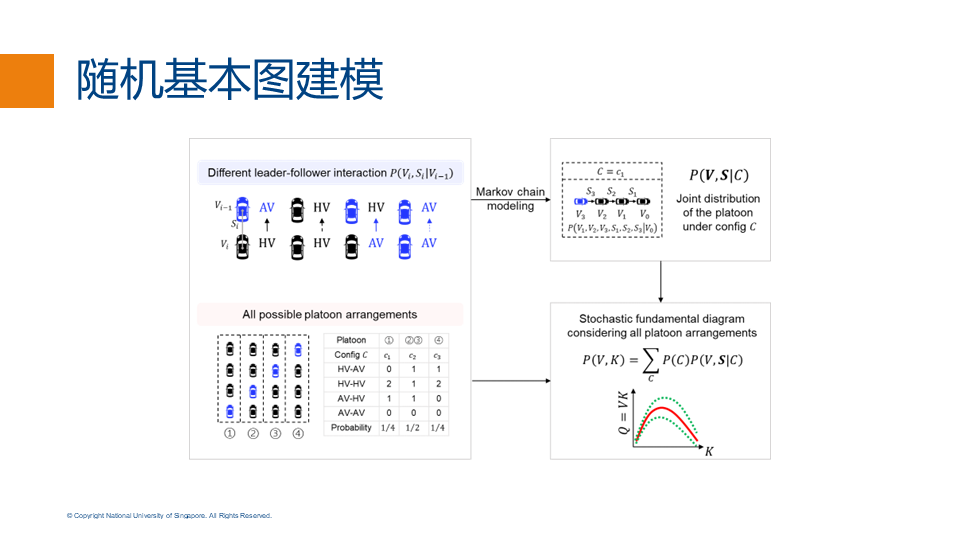
张小卉同学提出"数据驱动-概率建模"双轮驱动的技术路径。首先,基于混合密度网络(MDN)算法,从自动驾驶数据集中提取各类跟驰对(HV-AV、HV-HV、AV-HV、AV-AV)的跟驰行为条件概率分布。随后,通过马尔可夫链模型构建车队联合分布,计算所有可能的车队排列组合,最终推导出混合交通流的随机基本图。
 研究内容
研究内容
"这相当于为交通流建立了一个概率显微镜。" 张小卉同学 解释道,"不仅能捕捉平均通行能力,还能量化不同AV渗透率下的容量波动范围,这是传统确定性模型无法实现的。"
颠覆认知:AV渗透率提升或降低道路容量
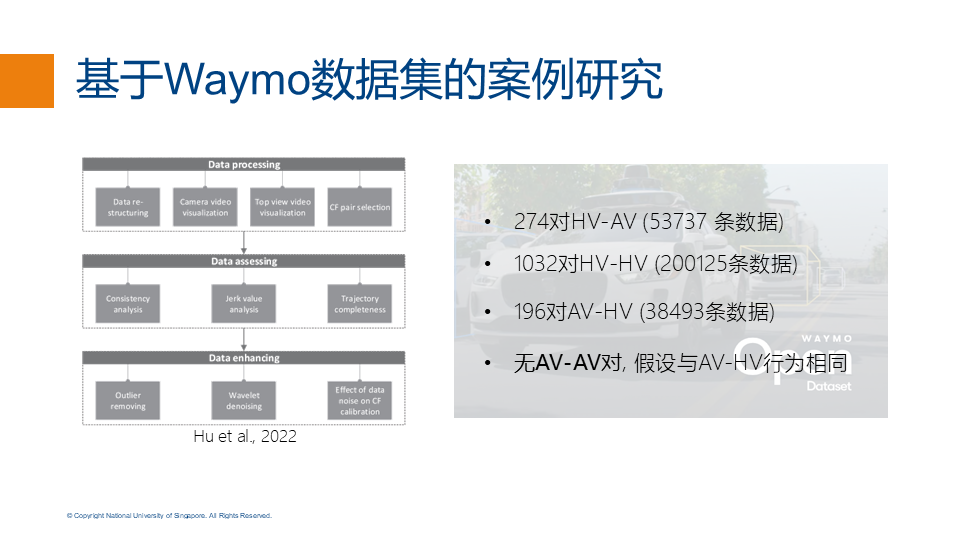
通过验证,该框架在NGSIM数据集上的预测结果与实证基本图高度吻合。进一步应用至Waymo真实AV数据时,研究发现:随着AV渗透率增加,道路平均通行能力和临界密度呈现下降趋势,但容量不确定性显著降低。
"当前AV的保守驾驶策略是一把双刃剑。"张小卉同学分析称,"它们通过保持更大安全间距提升稳定性,却可能牺牲整体通行效率。这提示政策制定者需在安全稳定与效率间寻找平衡点。"
此项研究的核心价值在于构建了首个通用概率建模框架,支持输入任意AV轨迹数据集,输出特定渗透率和空间分布下的随机基本图。这为混合交通管理策略的量化评估提供了全新工具。
研究内容
在交流讨论阶段,张小卉同学解答了老师和同学们提出的问题和疑惑,老师们对该研究也发表了自己的看法。孙剑老师提出传统建模方法面对新技术冲击存在的挑战;倪颖老师和杭鹏老师都强调了数据样本有效性的问题;梁浩阳老师提出了对模型随机性、对称性、一致性的考虑,秦国阳老师提出可以将其他算法框架融入模型的思考。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}