2024年10月23日,TOPS第151期组会于通达馆A102线下举行。本次组会由23级博士生崔一鸣、刘学凯带来自己的研究进展汇报,分别与大家讨论交流《无信号交叉口人机混驾交互建模与CAV协同决策》和《基于观点动力学的环岛车辆协商决策》和。课题组全体老师同学出席了本次组会。

汇报时刻
首先由崔一鸣同学带来《基于无信号交叉口人机混驾交互建模与CAV协同决策》的研究汇报。汇报内容涵盖研究背景、技术路线、实验平台建设和工作计划四个部分。
在研究背景部分,介绍了当前国内外自动驾驶试点应用问题频发,现有自动驾驶车辆的决策能力尚存缺陷,带来个体及系统层面的安全效率损失。目前,AV与HV存在交互困境,过分保守的交互行为,缺乏自适应调整能力;AV与AV交互能力弱等问题。因此,崔一鸣同学考虑混驾场景CAV间协同和与HV的交互,以车车协同视角安全高效地解决驾驶冲突问题。
研究内容
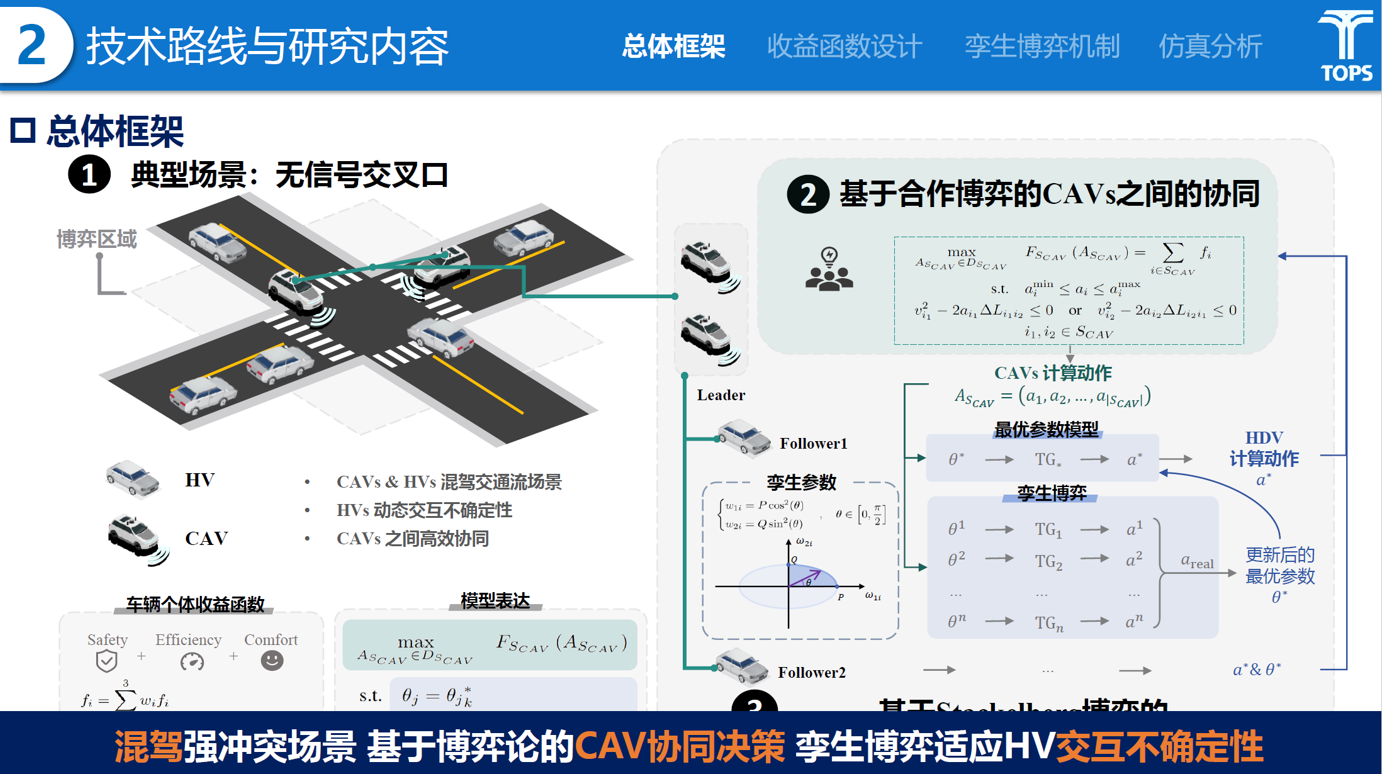
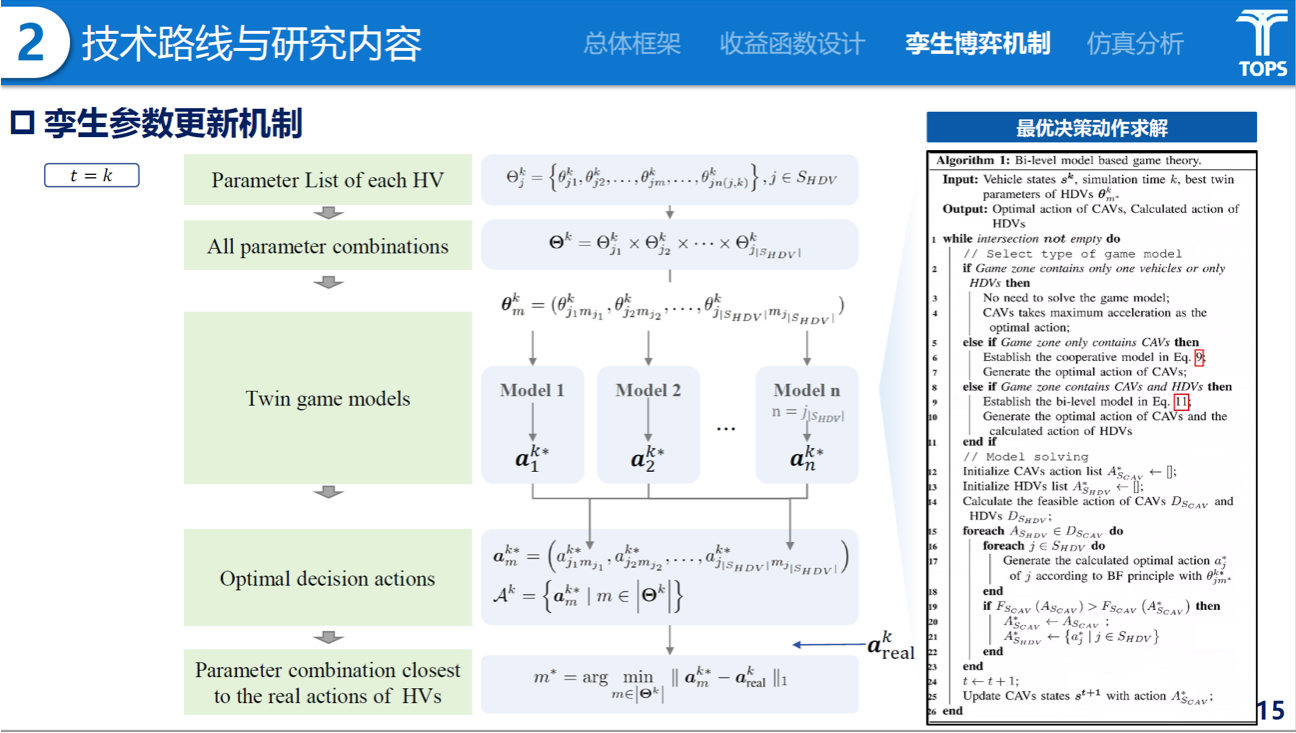
在研究方法部分,崔一鸣同学重点讲解了在混合驾驶强冲突场景中的典型案例——无信号交叉口。模型采用双层博弈策略,其中CAVs之间通过合作博弈实现协同,而CAV与HV之间则运用了Stackelberg博弈进行交互。详细介绍了最优决策动作的求解过程以及孪生博弈的参数更新机制。为了应对HV的动态不确定性,模型还构建了一个能够实时更新的孪生参数更新机制,以确保更精确的决策。
研究内容
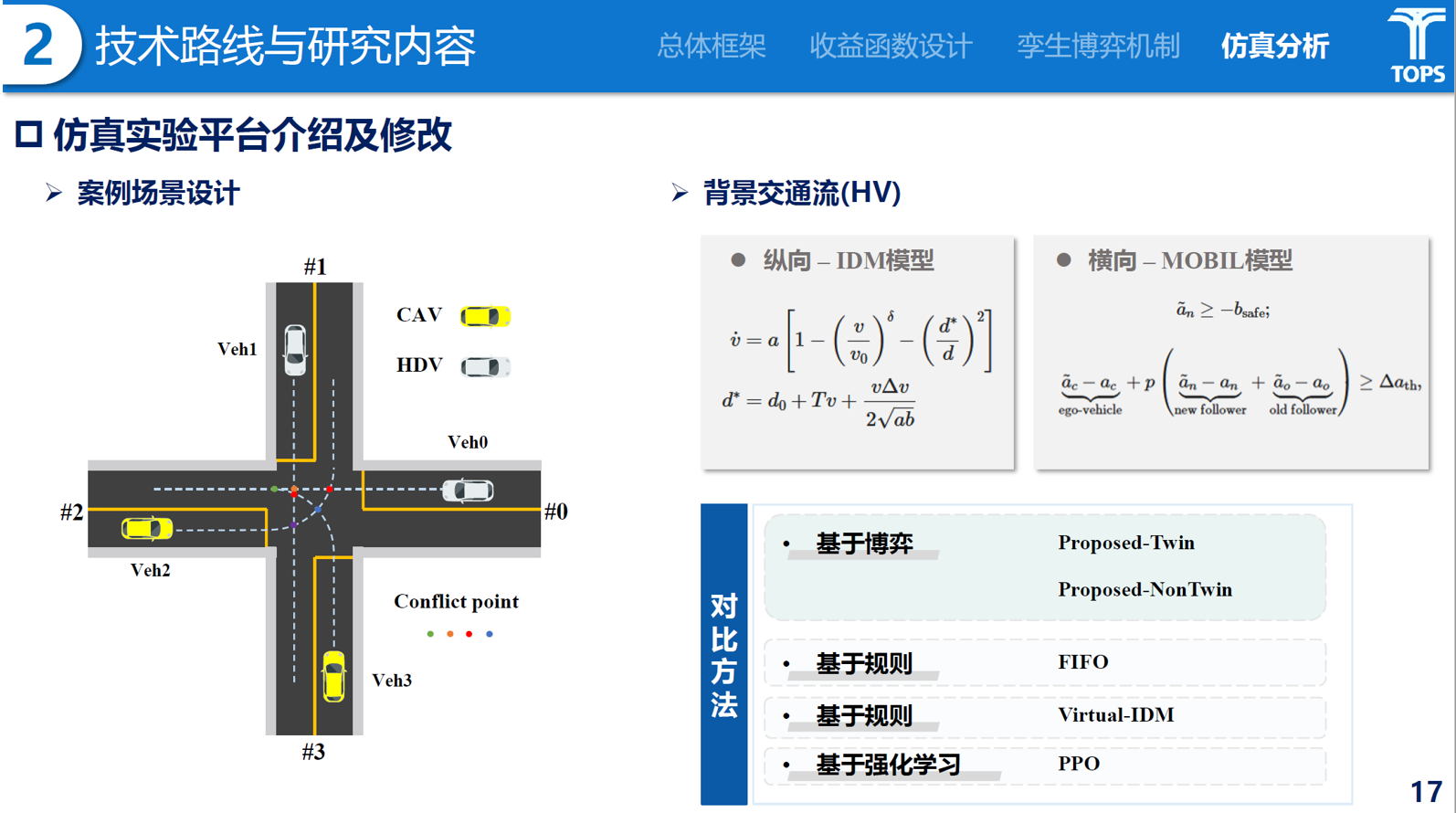
在仿真实验平台方面,为了验证算法有效性,添加了背景交通流模型(纵向-IDM模型,横向-MOBIL模型)模型无信号交叉口场景。考虑了多种不同的决策方法进行对比,包括基于博弈论(Proposed-Twin和Proposed-NonTwin)、基于规则(FIFO、Virtual-IDM)以及基于强化学习的PPO模型,用于测试和验证不同策略在无信号交叉口的表现。
通过对多个博弈参与对象的考虑平衡CAVs和HVs的通行情况,使两者达到了相对一致的整体通行速度。CAVs安全水平有显著上升。InTwin方法充分考虑受控车辆HVs的交互行为更好提升了CAVs的安全水平。
研究内容
在实验平台建设版块,展示了实验平台的建设情况,从信息的获取、决策计算、控制执行,到数据存储和回放,涵盖了自动驾驶实验平台的完整流程。同时,平台通过并行计算提升了实验效率,并支持实验结果的回放与复盘,确保实验过程中的各个环节都能被有效验证和分析。

研究内容
最后介绍了下一步的研究计划。

研究内容
随后,刘学凯同学带来《基于观点动力学的环岛多车协商决策》研究汇报。汇报内容涵盖研究背景、基于共识的冲突区协同、基于强化学习的换道决策、仿真结果分析、后续计划五个部分。

汇报时刻
在研究背景方面,目前AV和CAV的商用化正在进行,但其在实际交通系统中面临一些问题,比如交互死锁、集体窒机等情况。无信号环岛场景通常被认为是典型的复杂驾驶场景,环岛中的冲突点和合并点特别多,自动驾驶系统需要持续跟踪和预测其他车辆的行为,难度较大。当前的NOA(Navigate on Autopilot,自动导航驾驶)功能在环岛场景中往往无法完全应对,需要驾驶员介入接管。
研究内容
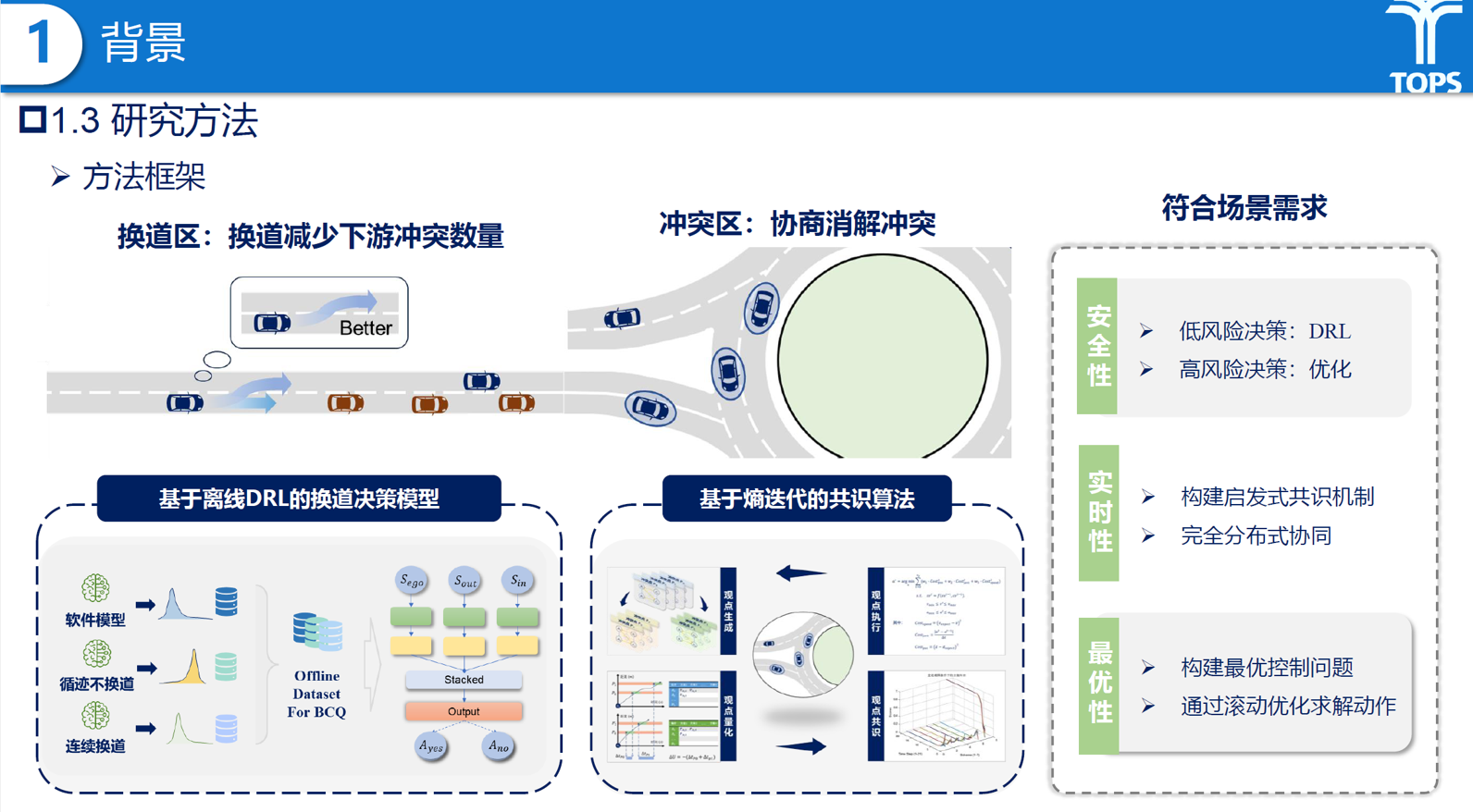
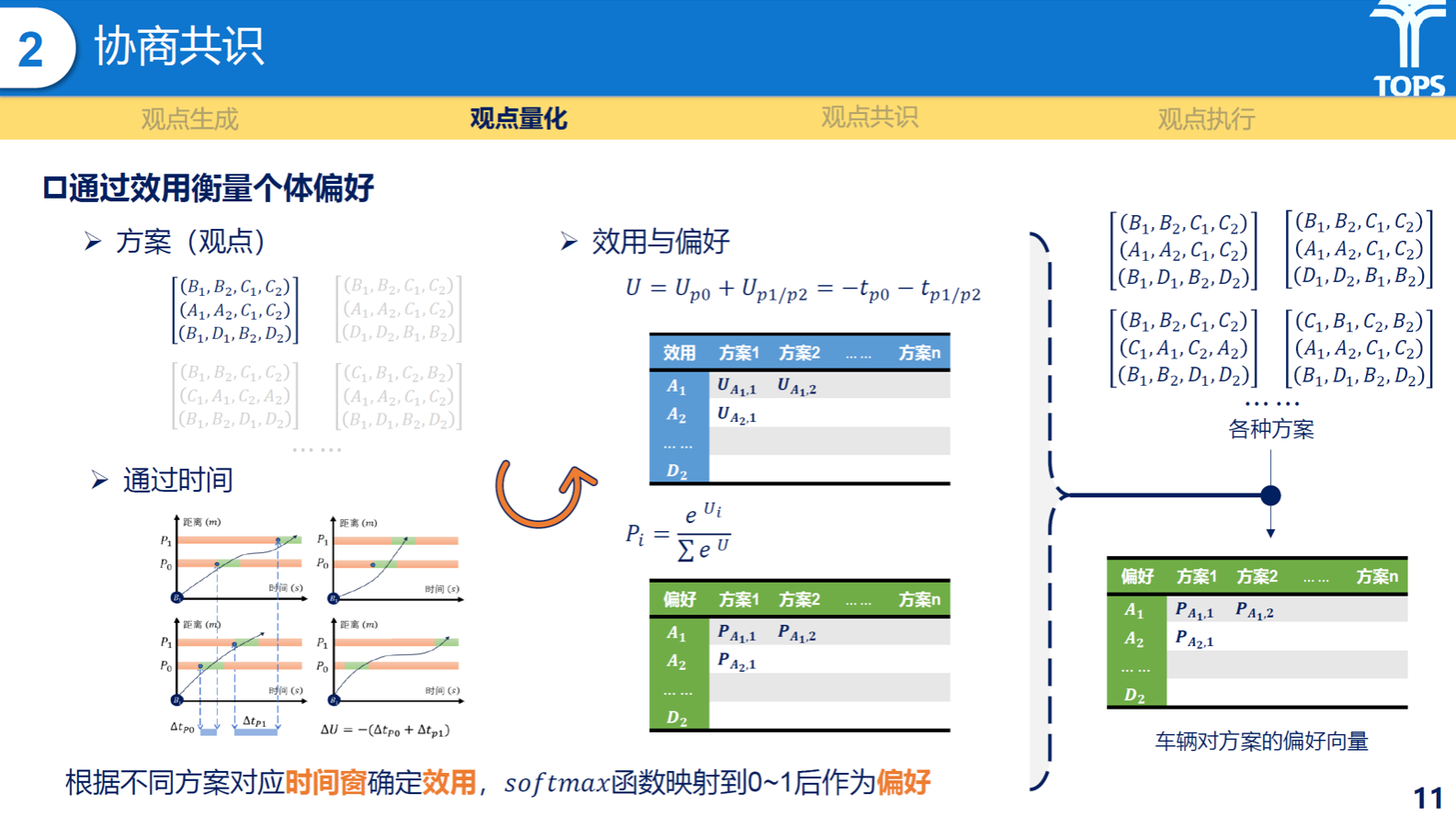
重点介绍了协商共识的概念,主要从观点生成、观点量化、观点共识、观点执行等方面确定如何通过生成有限的通行方案,并使用优先搜索和剪枝来减少需要评估的方案数量,从而实现多个自动驾驶车辆在冲突点的有效协同通过。

研究内容
研究内容
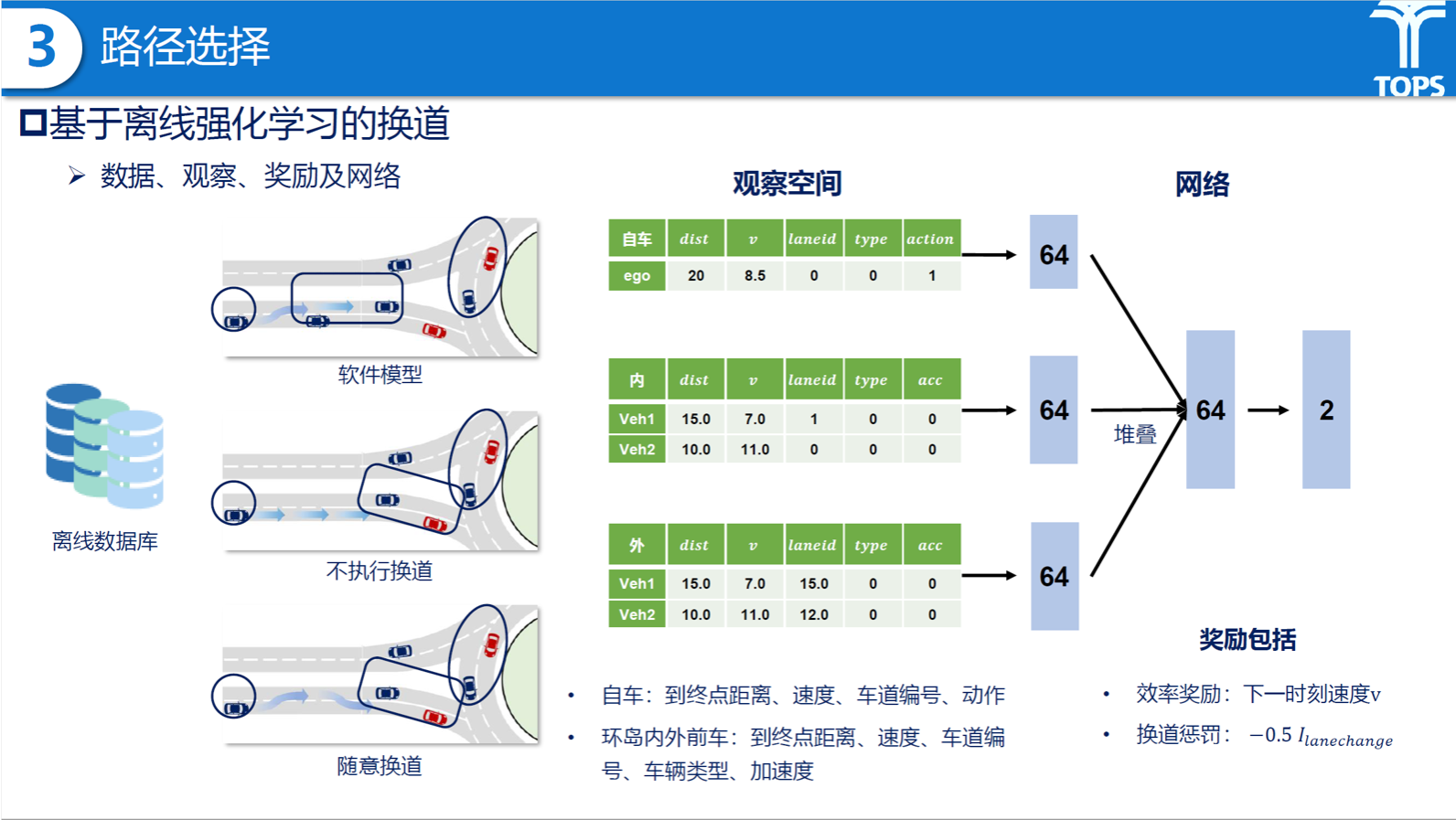
在基于强化学习的换道决策部分,系统通过输入自车及周边车辆的信息,使用强化学习模型进行路径选择和换道决策。其目的是通过奖励函数(速度奖励和换道惩罚)来优化车辆的行驶路径,确保车辆在合适的时机进行换道操作,提升整体驾驶效率。
研究内容
在仿真结果分析部分,场景设置:使用了TESS NG进行二次开发,背景车辆是由软件生成的,模拟了多个车辆在不同车道上行驶的复杂交通场景。场景中设置了一个汇入道路,初始有4到8辆车,车辆的位置、速度都是随机生成的。仿真测试自动驾驶车辆(CAV)的渗透率(占比)从50%到100%,并测试其算法控制效果。仿真持续时间为30秒,记录车辆在路段汇入区的信息,分析不同情况下的表现。
最后介绍了下一步的研究计划。

研究内容
在讨论环节,课题组各位老师提出了宝贵的建议。孙剑老师对汇报给予了高度评价,两位同学的研究具有很强的落地性,结合了域控制技术和TESS NG平台。他还建议未来的研究应尽量减少对特定场景的依赖,并进一步建立丰富的场景库和测试数据库。倪颖老师则关注模型中HV背景车与真实交通轨迹的相似性,并对此提出了问题。孙杰老师建议研究的逻辑链条可以进一步理清,使研究框架更加严密。岳李老师则对两种方法的适用性及其实际效果提出了问题。梁浩阳老师和吕志超老师深入探讨了模型技术的具体细节,并提出了针对性的改进建议。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}