2024年5月24日,TOPS第五小组组会于通达馆A102线下举行。本次组会邀请了南洋理工大学的黄志宇博士与我们分享《自动驾驶汽车可扩展,可学习和交互性决策系统》的相关内容。TOPS第五小组全体同学及其他小组部分同学参与了此次组会。

组会现场
黄志宇博士先后介绍了近期的多项研究成果。
l 针对自动驾驶车与其他交通参与者之间的交互行为预测困难问题,提出了一个名为GameFormer的模型。通过结合Level-k博弈和Transformer编码器-解码器结构模拟场景元素之间的关系,有效细化交互过程,在Waymo交互预测任务与nuPlan基准测试中取得了领先的性能。
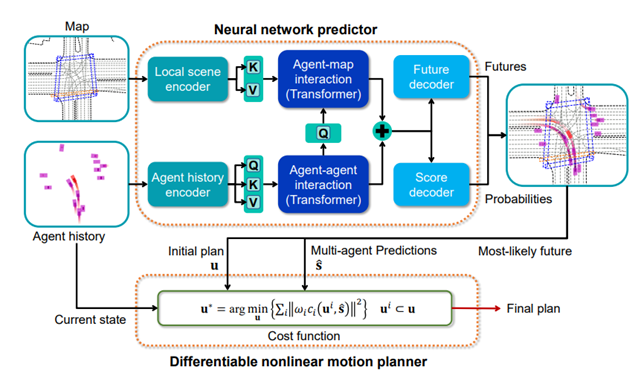
l 针对传统自动驾驶系统中的预测-规划模块分离造成的成本函数调整难题,先后提出了集成的预测-规划框架DIPP与DTPP。前者使用可微分的非线性优化器作为运动规划器,允许自动驾驶系统从数据中学习成本函数;后者引入了一个以搜索为中心的Transformer模型,并提出了一个具有潜在交互特征的可学习的成本函数,通过耦合预测-评价-规划模块以直接提高最终规划性能。
汇报内容
l 针对如何生成现实且可控的仿真交通流,提出了一个名为Versatile Behavior Diffusion (VBD)的新框架,该框架使用基于扩散的生成模型来模拟具有多个交通参与者的交互场景。通过多步指导和细化,模型能够生成与场景一致的多智能体交互,还能够适应各种应用。评估表明,VBD在Waymo基准测试上实现了最先进的性能。
黄志宇博士的研究激发了大家浓厚的兴趣。在提问环节,21级博士生房世玉就Level-k博弈中环境车k的选择及异质性进行提问。23级博士生刘学凯针对Diffusion模型生成safety-critical场景时的风险评估方法与可调整参数进行提问。23级博士生崔一鸣DIPP多模态轨迹预测的出发点以及传统评价指标(ADE、FDE)是否有效进行提问。最后,22级硕士生刘佳琦针对如何选择研究工作的主题、如何判断研究工作的价值等议题与黄志宇博士进行了交流。至此,TOPS第五小组本次小组会圆满结束!
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}