2024年5月15日,TOPS第143期组会于通达馆A102线下举行。本次组会由21级硕士生傅澳晖、唐揽月和冯不凡进行硕士毕业预答辩汇报,与大家讨论交流基于自适应子集模拟的自动驾驶安全性验证、基于认知理论的驾驶人建模及风险评估和“点-链-网”新视角下的城市交通网络连通性失效机制研究等内容。课题组全体老师和同学出席本次组会。
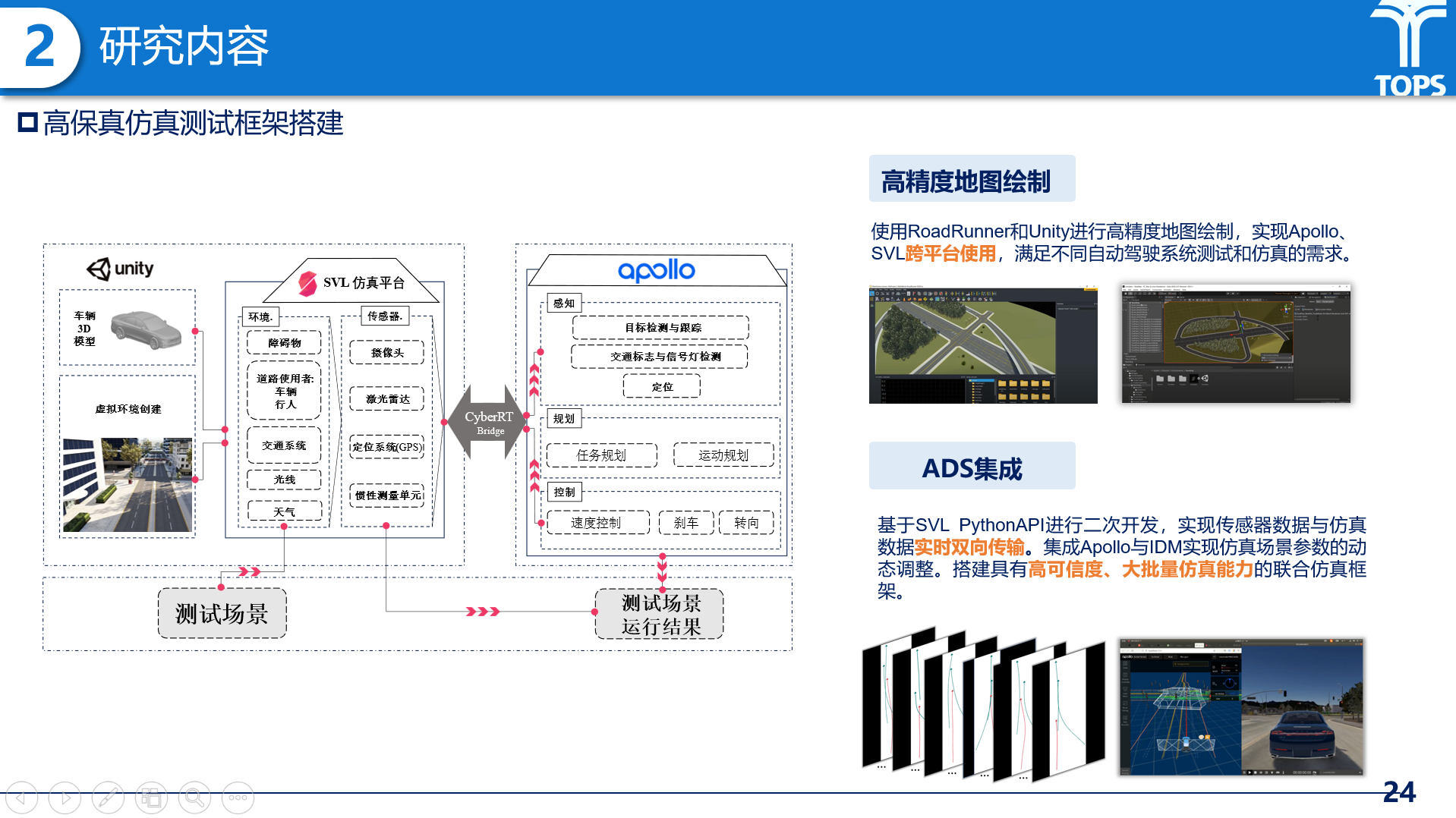
首先由傅澳晖同学带来基于自适应子集模拟的自动驾驶安全性验证相关研究汇报。傅澳晖同学的汇报分为研究背景与文献综述、研究内容、实验分析以及总结与展望四个部分。傅澳晖同学提出,传统的里程化路测相率低下、成本高昂,自动驾驶系统的安全性评估需要新的测试方法,而场景化的虚拟测试成为自动驾驶安全测试的核心手段。针对现有虚拟测试方法的不足,傅澳晖提出了一种基于自适应子集模拟的自动驾驶加速测试方法,有效处理和构建高维自然自动驾驶场景,提高测试效率。该方法在传统子集模拟方法的基础上,以样本相关性为优化目标确定最优接受率,实现马尔科夫链样本接受率自适应调整,提高了子集模拟方法的准确性。并搭建高保真仿真测试平台对算法进行测试,实验结果表明,与SS和IS加速测试方法对比,自适应子集模拟方法对碰撞概率估计有更高的准确性。最后,傅澳晖同学从方法的泛化能力和参数优化等方面进行了总结与展望。

汇报时刻
汇报内容
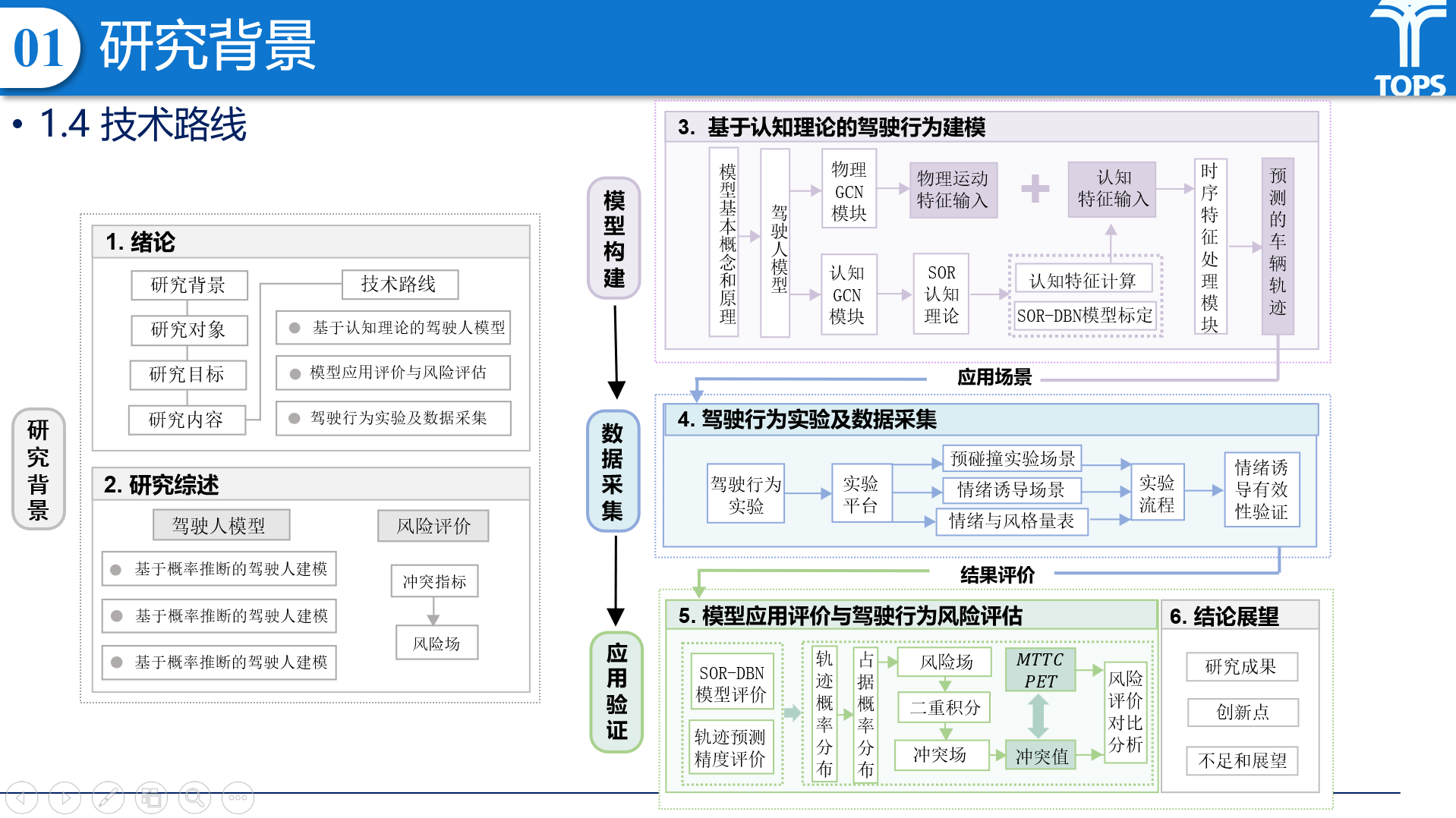
随后,唐揽月同学带来基于认知理论的驾驶人建模及风险评估方法的汇报分享,从研究绪论、基于认知理论的驾驶行为建模、驾驶行为实验与数据采集、模型应用与驾驶行为风险评估等方面进行汇报。在背景介绍部分,唐揽月同学提出驾驶员情绪驾驶易引发严重事故,针对情绪驾驶场景的驾驶人行为建模对于提高交通效率与安全有重要意义。针对现有驾驶员建模方法的不足,提出基于认知理论的驾驶员建模方法,通过历史时刻驾驶员驾驶行为数据和情绪状态数据进行车辆未来轨迹预测,建立同时考虑驾驶员物理运动特征和认知特征的CPSOR-GCN模型,提高驾驶员情绪突变场景下轨迹预测精度。该方法基于动态贝叶斯模型建立SOR认知因素间因果关系,基于图卷积网络实现对于物理-认知特征的高效学习,从而将认知理论融入驾驶员建模过程。另外,唐揽月同学还介绍了驾驶行为实验相关内容,搭建驾驶模拟器平台采集驾驶员信息,根据路怒、驾驶心理研究报告复现特定场景对驾驶员情绪进行诱导,并邀请共计26名同学参与实验。试验结果表明,SOR认知理论使得模型在较长预测窗口、强交互场景下以及产生情绪突变时有较高的预测精度。

汇报时刻
汇报内容
冯不凡同学汇报了“点-链-网”新视角下的城市交通网络连通性失效机制研究有关内容,主要从研究背景、研究内容、技术路线等方面进行汇报。在背景分析部分,冯不凡同学指出现有的拥堵渗流研究存在不足,亟需解析多点拥堵对交通网络连通性失效的共同效应,提高复杂交通网络系统的鲁棒性。冯不凡提出从“点-链-网视角逐层揭示交通网络连通性失效机制”,应用割点识别算法识别网络中所有分层瓶颈点,提出交替恢复模型解析拥堵渗流链式作用,有效提升网络韧性,对网状拥堵渗流结构与网络连通性关系进行回归分析,对网络连通性失效机制进行归纳总结。研究结果表明,割链是造成交通网络连通性失效的重要原因,割网存在鞍形特征,并且鞍点在一定条件下会转化成割点,继而引发拥堵渗流,导致网络连通性失效。

汇报时刻

汇报内容
在讨论环节,课题组各位老师针对三位同学的答辩内容提出了宝贵的建议。孙剑老师指出,在开展科学研究时,要重视科研成果的应用价值,在实际应用中挖掘“真”问题,避免“虚、软、非共识”,强化问题导向和应用导向。田野老师、倪颖老师和杭鹏老师对三位同学的汇报逻辑、ppt格式与汇报技巧提出了建议。孙杰老师、秦国阳老师、梁浩阳老师和吕志超老师围绕三位同学汇报的技术方案的具体细节进行了讨论并提出了建议。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}