2023年9月14日下午4:00,TOPS第130期组会于通达馆A102会议室线下举行。本次组会主要内容为23级17名新生进行自我介绍、展示现有工作以及讲述未来的计划与展望。课题组全体老师同学出席了本次组会。

课题组成员们欢聚一堂
首先,由2023级新生依次进行汇报,汇报情况如下:
2023级博士生黄奕龙与大家分享了硕士阶段《沉管隧道侧向排烟特性数值研究》的研究工作,随后介绍自己关于“脑控车”的最新研究进展,介绍了现有研究已经成功将脑电信号用于车辆纵向控制,也指出了现有关于脑控车存在的问题:BCI系统对被试者产生的脑电信号辨别能力不足,且脑控车的研究尚不适用于高速驾驶的场景。针对以上问题,黄奕龙表示拟在后续开展提高BCI解码精度和速度的工作。
2023级博士生孔爱静与大家分享了《基于可拓控制和MPC的多功能ADAS算法设计》等相关成果,随后讲述自己未来的研究计划,将从单车控制拓展到多车的协同决策与控制,现有编队存在以下问题:(1)现有编队多为纯CAV编队;(2)换道方式占用资源;(3)编队队形固定,安全性和效率差。针对以上问题,计划研究混驾场景下多车异构编队协同决策与控制,通过编队内车辆的构型的改变,实现编队内车辆的自主协同换道,从而以编队的整体的效率和安全性作为目标,实现编队在不同场景下能够自适的改变构型,提高整体的效率和安全性。
2023级博士生张国宇与大家分享了近段时间关于《对于极端天气下车路协同感知信息融合算法/框架研究》的研究工作,提出自己最新的研究课题:车路协同感知技术是解决极端天气影响的必要手段。他认为现有研究主要集中于良好天气的行车安全研究,而对于极端天气的研究尚存在大量空缺,因此具有较高性价比的研究价值和意义。
2023级直博生刘学凯与大家分享了本科阶段关于《针对环岛场景设计一种基于有限状态机的CAV自组织与协同控制方法》的内容,指出其上层使用的是有限状态机的方法,下层使用模型预测控制(MPC)的方法。上层状态机实现协同对象寻找,下层时域优化实现车车协同控制。未来研究工作计划借鉴集群机器人、无人机的模型与方法开展车车协同的研究。包括将集群机器人的集群结构与控制方法迁移到车辆。
2023级硕士生张家锐与大家分享了近期关于《模型预测控制与车辆控制仿真》的工作,使用MPC控制器在每一个采样周期内使车辆及时跟踪轨迹上的参考点,并用局部规划器用来对车辆进行局部的短距离路径规划,用来完成车辆避障控制,包括静态障碍物与动态障碍物。最后介绍自己的第一学期重点工作内容,继续加强控制、车辆等方面的知识学习、学习掌握C++等。
2023级硕士生叶轶淳与大家分享了近期华为故障注入项目的工作内容以及本科阶段关于《基于分布鲁棒优化的自动驾驶仿真测试噪声处理》的内容。在项目研究上紧跟师姐的步伐逐个阶段的完成当下的任务,同时在TRB国际会议论文征稿中也投稿了自己的相关研究成果。在后续研究中,叶轶淳希望能够继续开展华为故障注入项目的研究,并继续探索高维时序事故场景搜索方法。
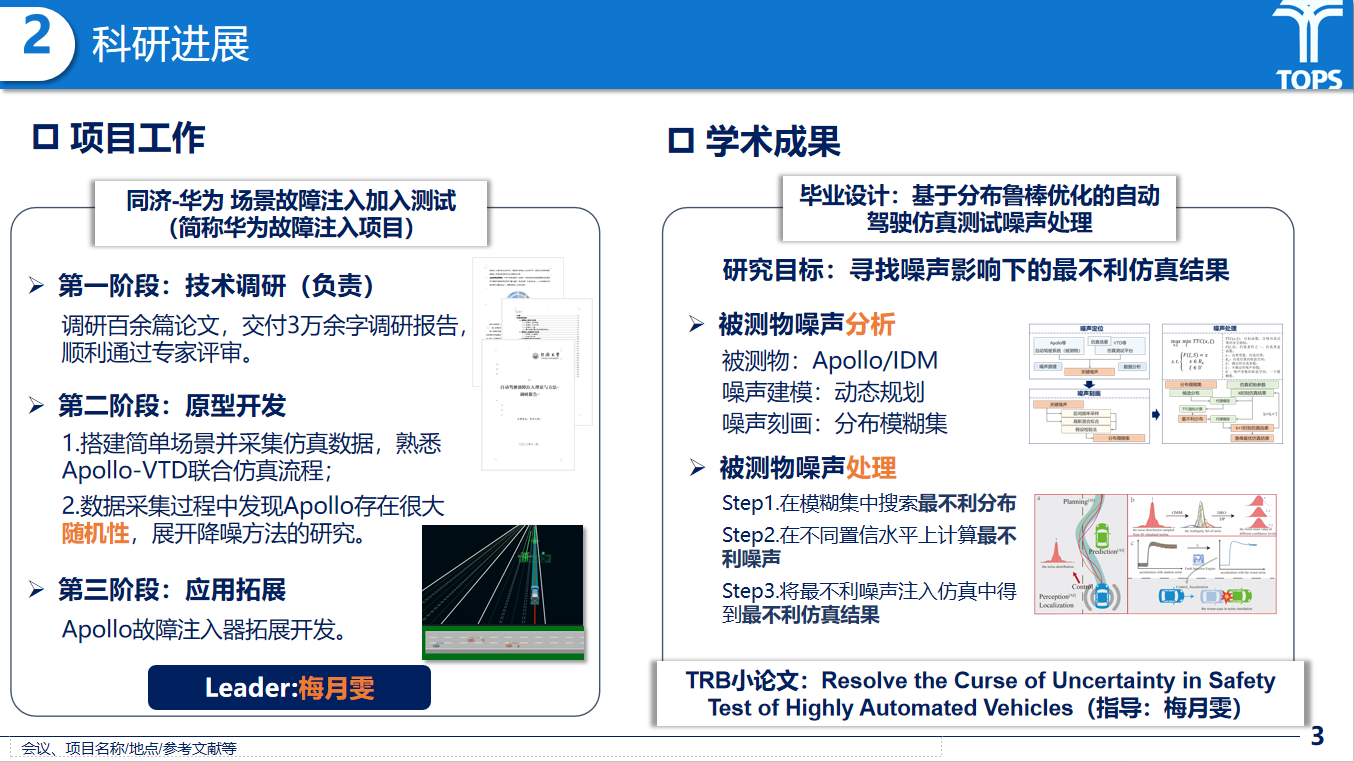
叶轶淳研究工作展示
2023级硕士生陈前与大家分享了本科毕设《网络应急物资调度》的研究,考虑铁路抢修的情况下进行应急物资调度的多目标优化。目前主要开展关于机动车轨迹预测的研究工作,正处于阅读文献和复现经典算法的阶段。同时也协助老师完成了沙盘环岛实验的工作,并在最后希望自己能够多多向课题组优秀的师兄师姐学习。
2023级硕士生尹恒与大家分享了本科毕设关于《车道偏离预警》的相关研究,旨在车辆有偏离出车道的趋势时提醒驾驶员开回。研究中提出了Non-stationary Crossformer结构,用于横向轨迹预测,充分结合了偏离过程中轨迹变化大的特点。在未来研究计划中希望能够在多智能融合对自动驾驶汽车决策优化展开研究工作。
2023级硕士生罗曼与大家分享了本科毕设关于《人机混驾环境AV(Autonomous Vehicle)表现》的相关内容,工作包括驾驶模拟实验平台搭建、驾驶模拟实验设计与开展、驾驶模拟实验数据分析等,指出在路权不清晰的情况下,AV意图表达不明确或缺少意图交流容易导致事故,得出“自动驾驶车辆意图表达不明确或缺少意图交流以致难以适应复杂环境”的结论。未来计划开展评估不同eHMI设计的有效性的研究工作。
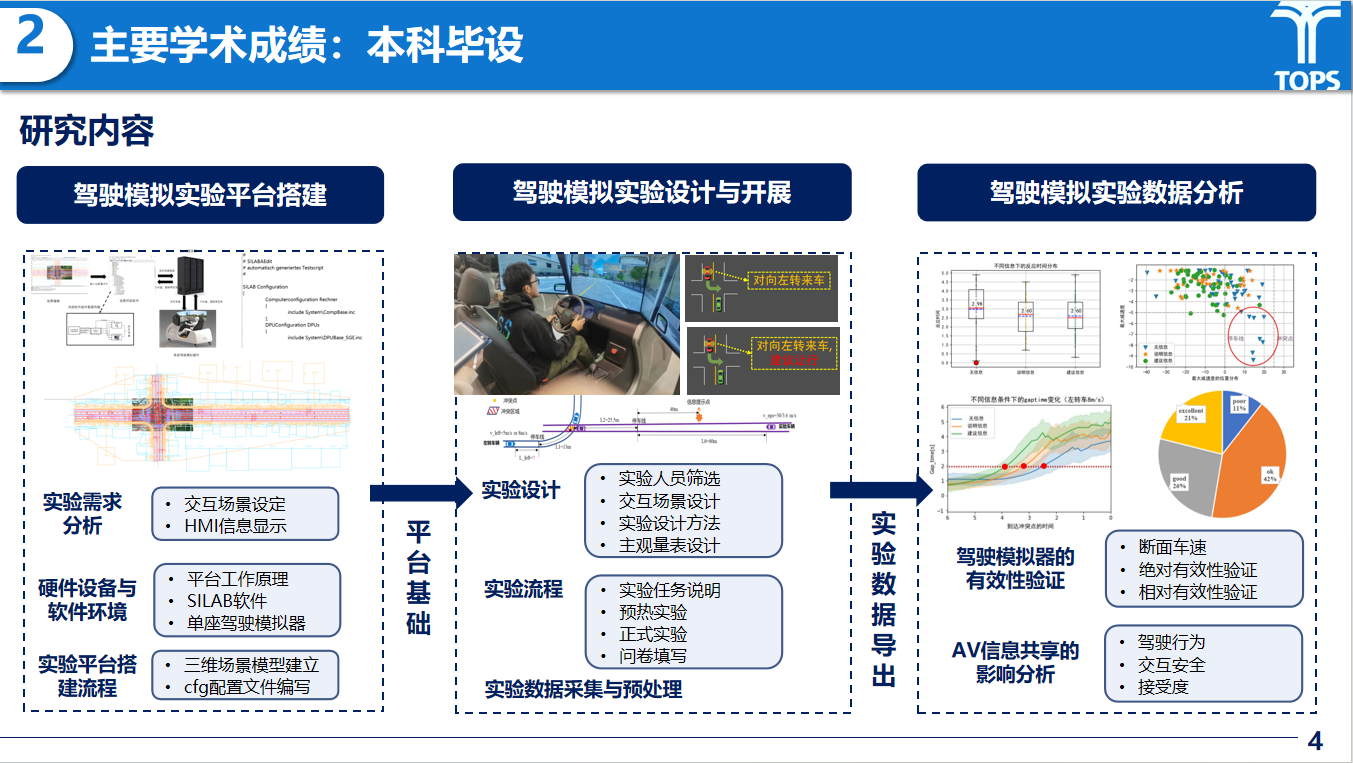
罗曼同学研究工作展示
2023级硕士生黎瑞与大家分享了自己近期华为故障注入项目(FI ENGINE)的情况,已经完成perception模块的三种类型的故障注入。关于科研方面的工作,黎瑞目前主要负责“基于深度强化学习的拟人化自动驾驶建模”,他结合自身优势、政府支持、技术发展等阐明人机混驾交通流将成为趋势,目前研究状态正处于竖立技术路线的阶段。
2023级硕士研究生石坚给大家分享了关于《基于实时神经反馈的L3级自动驾驶接管能力提升》的研究内容,主要研究目的包括:(1)分析接管行为:结合脑电等特征对驾驶员接管时间分段解析建模及关键因素辨识;(2)提升自动驾驶接管能力:通过神经反馈干预方式提升自动驾驶接管能力。随后介绍自己未来的研究计划,主要围绕接管预实验、神经反馈训练实验、接管性能提升效果验证等进行展开。
2023级硕士生孔若溪给大家分享了自己不久前刚完成的TRB会议论文《基于知识增强动态贝叶斯网络的故障注入测试加速》,她指出现有的模拟实验无法完全复现实际中的故障情况,因此认为有必要使用人为的故障注入技术来深化测试自动驾驶系统的安全可靠性。未来的研究中孔若溪计划将现有加速算法拓展至更复杂的场景,并尝试故障空间降维加速方法展开研究。
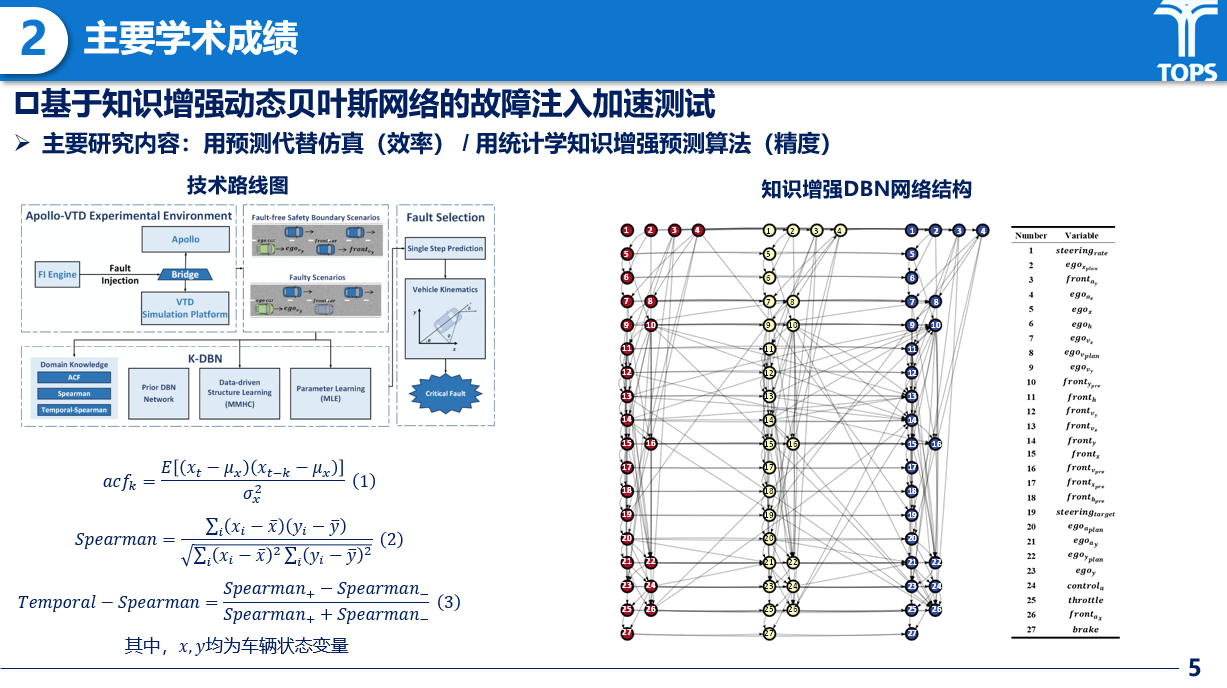
孔若溪同学研究工作展示
2023级直博生崔一鸣与大家分享了本科毕设《基于博弈论的交叉口环境下人机混驾协同决策研究》内容,包括:(1)基于合作博弈的CAV协同决策模型;(2)基于斯坦伯格博弈的CAV与HV交互模型;(3)基于双层规划的混驾场景协同决策模型。考虑到本科毕设中研究的不足,目前开展的主要工作还是对原有研究的完善,包括:(1)HV驾驶风格划分:风格聚类 → 异质性初始模型;(2)从数据中学习得到目标函数形式。最后明示后期的研究设想是对个性化的车辆引导策略的探讨。
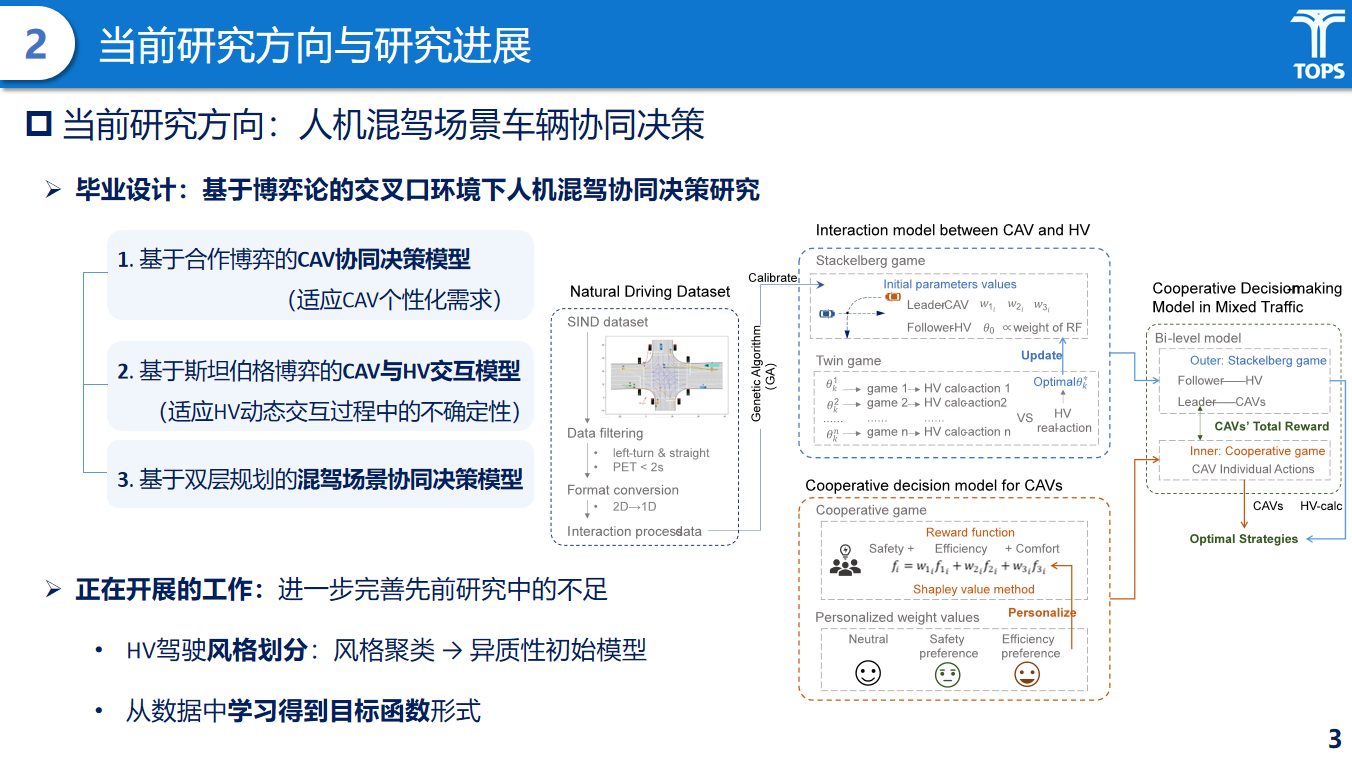
崔一鸣同学研究工作展示
2023级硕士生何佳原同学在自我介绍中将自己的英语优势展现出来,获得老师们一致好评!随后与大家分享了本科毕设关于《混行路段HV/AV机非交互行为差异性分析》的研究内容。主要内容是基于对包含HV-B和AV-B的大量Argoverse2机非交互数据的处理,定性、定量分析HV/AV的超车、跟驰行为模式差异,为AV行为打分,提出AV交互策略优化建议。最后对自己和课题组提出了自己的期望:以认识、完善自我为要求,以发现、解决实际问题为导向,希望自己能够培养期解决实际问题的能力。
2023级硕士生刘林坤分享了自己对接刘懿如关于社会性交互行为的研究,即在交叉口无保护左转情形下,建立车辆(抢/让)博弈模型,处理分析实际交互数据,标定博弈模型收益参数,基于模型研究车外交互EHMI( external human-machine interface )信息暴露的最优策略。最后考虑EHMI应用,从动态博弈信息披露的视角,证明EHMI对缓解冲突的作用。
2023级硕士研究生孙宇柔与大家分享了最近关于《人机共驾中驾驶员对自动驾驶系统信任度动态估计与改善》的相关研究,技术路线包括:非侵入式主客观结合方式采集数据进行信任测量→运用SOR-DBN网络进行信任建模→度量系统客观可信任水平与测量所得信任比较,对信任改善。主要解决了解决驾驶员过信任导致L3级接管失败、欠信任导致操作失误增加的安全隐患等问题。后续研究将继续推进信任的建模和改善等工作,目的是解决驾驶员过信任导致L3级接管失败、欠信任导致操作失误增加的安全隐患。
2023级直博生朱玉寒与大家分享了本科参与的广州市关于内涝风险评估的项目,研究发现现有评估方法呈现单点、静态的特征,研究的路网规模较小,且忽视了内涝点位间相互作用,因此想通过将优先级评估问题转换为优化问题,利用基于仿真的优化方法(Simulation-based optimization)求解。未来研究中计划开展研究如何使用代理模型替代DynusT的动态路网加载模块,来解决大规模流量分配和相关优化问题的计算瓶颈。

2023级新生上台进行工作汇报(部分)
会上,孙剑老师针对大家的汇报从汇报时应有的礼仪台风、PPT制作、研究方向的可行性等给出了许多宝贵的建议,其中反复强调的一个重要的思想是:需求牵引,问题驱动。需要将自己的现有研究落到实处,将自己的研究环路缩小到一个自己能够完成的程度,才是真正可行的研究。
至此,本次组会圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}