CommonRoad自动驾驶运动规划竞赛是由iVEX资助,由慕尼黑工业大学(TUM)主办的一项国际自动驾驶赛事。赛事的主要内容是设计适应于复杂交互场景的自动驾驶规划决策算法。2021年以来,在两届比赛中吸引了同济大学、清华大学、卡耐基梅隆大学、苏黎世联邦理工学院等众多国内外知名高校的队伍。
2022年CommonRoad自动驾驶运动规划竞赛结果于近期公布,课题组成员赵晓聪参加的队伍(队伍其他成员有:崔明阳(清华车辆)、杨奕彬(清华车辆)、曹雷(同济车辆))获得冠军,并受邀参加IEEE IV2022国际会议workshop汇报。

结果排名
据悉,该队伍采用了语义决策-轨迹规划双层模型。在语义决策层,采用了蒙特卡洛树搜索(Monte Carlo Tree Search, MCTS),进行长时语义行为序列的制定。在运动规划层,采用了Apollo解决方案Lattice规划器生成、筛选并优化运动轨迹。在该基线方案的基础上,考虑了无信号灯交叉口等交互场景中交互车辆的潜在合作行为,对非必要的保守语义决策进行优化,以提升交互场景中的驾驶表现。

汇报封面
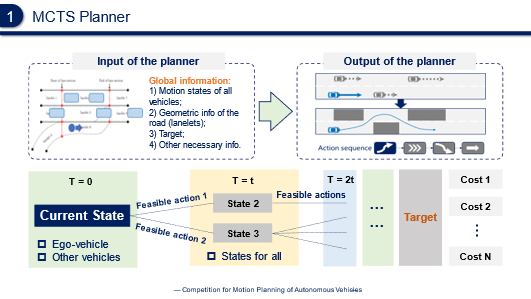
MCTS结构简介
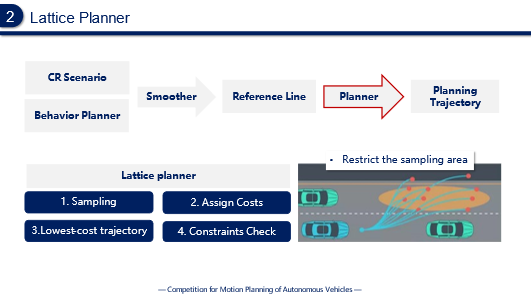
Lattice规划器简介
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}