2021年11月25日17:30,TOPS课题组第101期组会在通达馆A436线上线下同时召开。本次组会由19级博士生李建强就《数据与模型融合的交叉口非机动车行为建模》进行汇报。线上线下的与会成员包括孙剑教授、倪颖副教授、田野副教授以及课题组全体同学。

汇报环节
主讲人李建强首先介绍了对二维平面下的非机动车行为进行建模的研究背景以及研究难点,指出非机动车行为具有无车道规则,随意性强以及随机多变的特征。
针对上述问题,李建强基于多样的目的地构建了非机动车行为建模框架,该框架考虑了非机动车行为随机性和多变性的特点,可以更准确的描述非机动车随机多变的行为。在他提出的行为建模框架中,利用深度学习模型生成非机动车的执行轨迹,实现了对骑行者复杂特征的准确提取。同时,他考虑动态时间下交互对象的预测性和非机动车的异质性,基于路径建立了非机动车行为优化模型。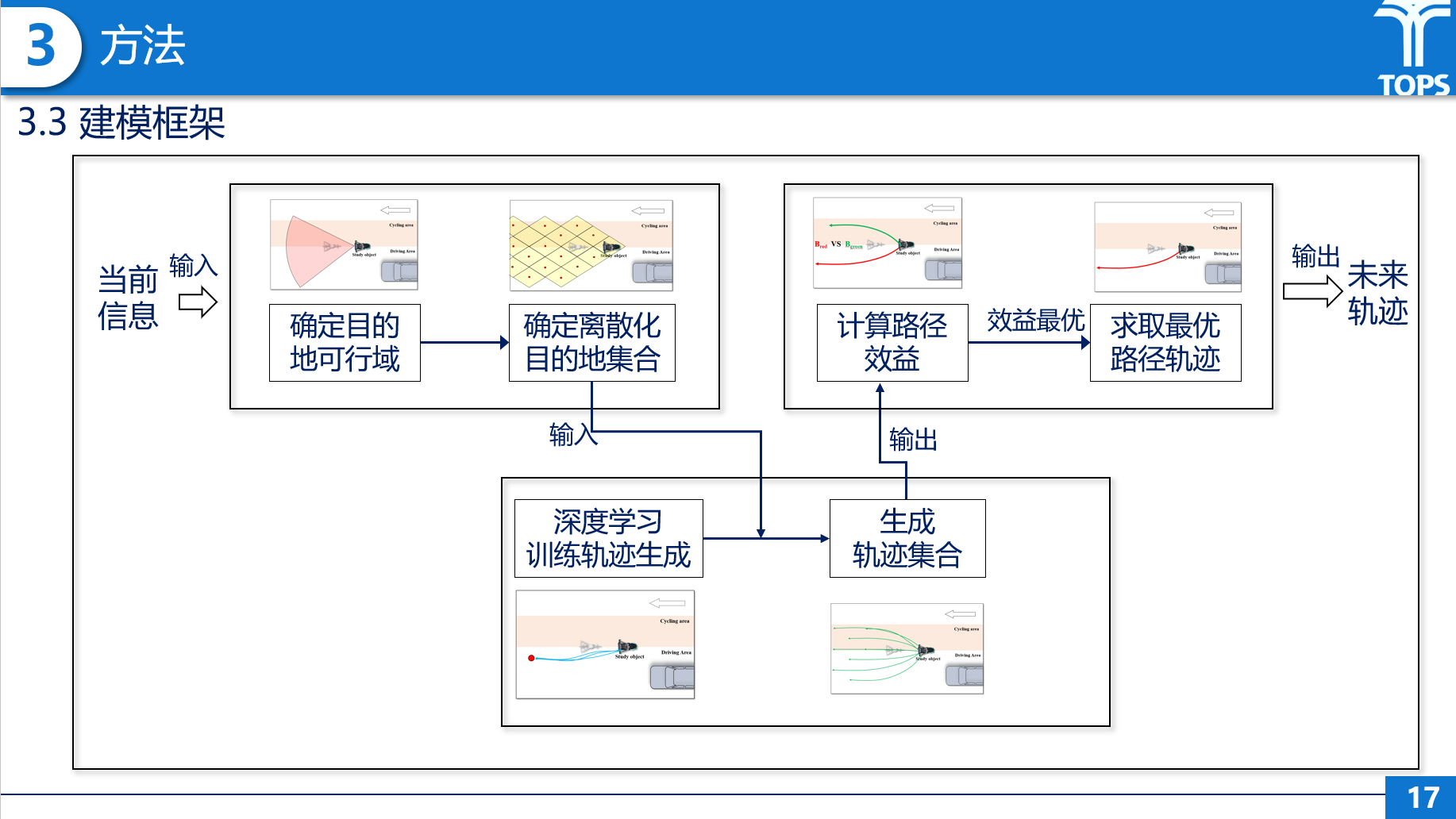
汇报内容
在讨论环节,赵晓聪就非机动车突发行为的定义及识别提出了疑问;王诗涵对建模框架中目的地集合的生成、可行域实现离散化的具体过程进行了提问;刘晗提出轨迹生成的过程中可能会出现不符合运动规律的情况,无法保证轨迹曲率的连续性。李建强对上述问题分别进行了细致的答复。倪颖副教授建议对研究的结果进行更深入的分析,进一步论证分析在输入信息比其他研究少的情况下结果更好的原因。孙剑教授肯定了该研究在模型训练方法上的创新性,并建议要在可比的环境下与其他研究所用的方法进行对比,使研究结果更令人信服。此外,孙剑教授响应习近平主席“把论文写在祖国的大地上”的号召,建议不要局限于国外现有研究的指标体系,要建立自己的语言派系。最后,田野副教授对李建强的工作和一直以来的进步表示了肯定,对论文写作以及模型中有关交互车的内容提出了建议和改进意见。至此,本期TOPS组会圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}