2016年5月25日下午14:00~15:30,来自德国PTV公司的Thomas Benz博士在交通学院103进行了《PTV针对自动驾驶的产品和服务》的报告,吸引了交通学院大量的师生前来学习。
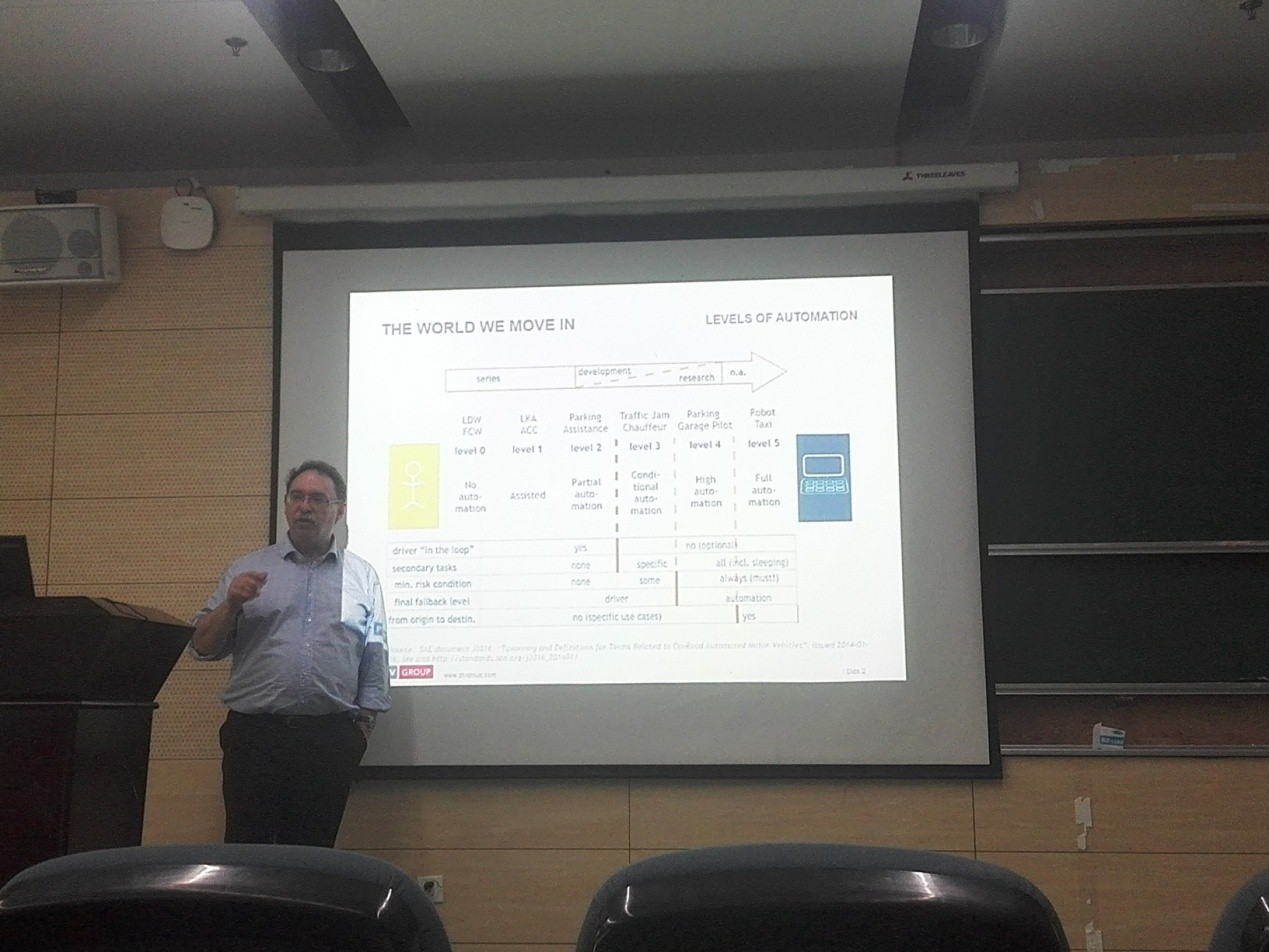
Benz博士演讲
在报告中,Thomas Benz博士介绍了随着无人驾驶技术的发展,德国PTV公司在微观仿真软件VISSIM中,也在不断更新技术,实现无人驾驶技术在应用层面的仿真。他由无人驾驶不同等级的车辆入手,介绍了在无人驾驶车辆的不同发展阶段,车路通信,车车通信最终可以达到的状态,以及达到最后所有车辆无人驾驶的阶段。他通过一则实际案例,说明了无人驾驶的应用:在快速路车队中,有部分车辆实现了无人驾驶车辆的通信功能,其在前方发生拥堵后,其向后方车辆传输速度信息,后方无人车流检测到前方速度降低,就会提前减速,以提高驾驶员的舒适程度,避免交通流震荡。他以详细的图表比较了在有速度反馈信息和无速度反馈信息情况下的后方无人驾驶车辆的速度变化、加速度变化。然后他对PTV在PreScan的研究应用向大家做了具体的展示。
在报告结束后,同济大学TOPS团队孙剑教授,倪颖副教授及部分学生在交通学院517与Thomas Benz博士进行了进一步的深入沟通。团队首先介绍了团队在多车驾驶模拟器与Vissim的连接仿真的研究,在单一车辆连接操作中,系统的稳定性较好,但vissim仿真系统一旦连接到多车驾驶模拟器时,系统会出现不稳定的跳屏,对多车驾驶模拟器操作的车辆轨迹,加减速度等计算也存在不精确等问题,Thomas Benz博士表示会通过德国团队,与TOPS团队一同解决此问题。孙剑教授同时表示了对 PreScan软件的兴趣,其在自主车辆的测试应用如车辆,行人碰撞系统仿真等在无人驾驶车辆的研发中均存在重要意义,Thomas Benz博士表示PTV公司正在进行新版本的完善,预计在暑期即将完成,届时将于TOPS团队进行软件进一步应用的探讨。
随后,TOPS团队成员对自主开发的交叉口二维空间共享仿真模型PDA(Plan-Decision-Action) 进行了介绍,其特点为:轨迹多变模拟驾驶员“规划-决策-执行”驾驶过程、综合分析混合交通流态势、平面上二维驾驶行为模型、高仿真度有限优先权规则。此模型可以更加精确的模拟中国环境下交叉口车辆通行的行为,Thomas Benz博士表示研究意义重大,可以考虑在以后的vissim系统中添加此交叉口二维仿真模型,以实现具有中国特色的交叉口二维仿真应用。同时团队成员还对快速度汇入段,汇出段,交织区的仿真进行了说明,在中国引入vissim及TransModeler等软件时,其默认缺省参数值往往不能准确仿真实际情况,并且一般仿真结果差异巨大,而校准参数则需要较为专业的人士来完成,这也给仿真软件的应用带了了一定阻碍,团队应用的跟驰模型,相比于widemann模型,需要调整的参数较少,并且在中国上海快速路应用的也较好。Thomas Benz博士及随行人员表示,在具体的应用中,可能每个城市的交通行为均存在差异,PTV方愿与TOPS团队进行不同国家、地区采用何种默认的模型参数值进行研究。
交流结束之时,Thomas Benz博士与孙剑教授均表示此次交流收获很多,相互间也解决了较多的学术及软件应用问题,都表示非常期望下一次的见面。
最近更新:2018年3月10日 18:39:01
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}