2021年8月18日下午,课题组孙剑教授受“HRI大讲堂”的邀请,于海康威视研究院上海分院开展了题为“基于轨迹数据信息的道路交通主动管控”的讲座,除上海现场外,杭州、成都分会场线上同步进行,来自大数据智能部智慧交通组、多维感知组等部门的领导和同事共计八十余人出席。
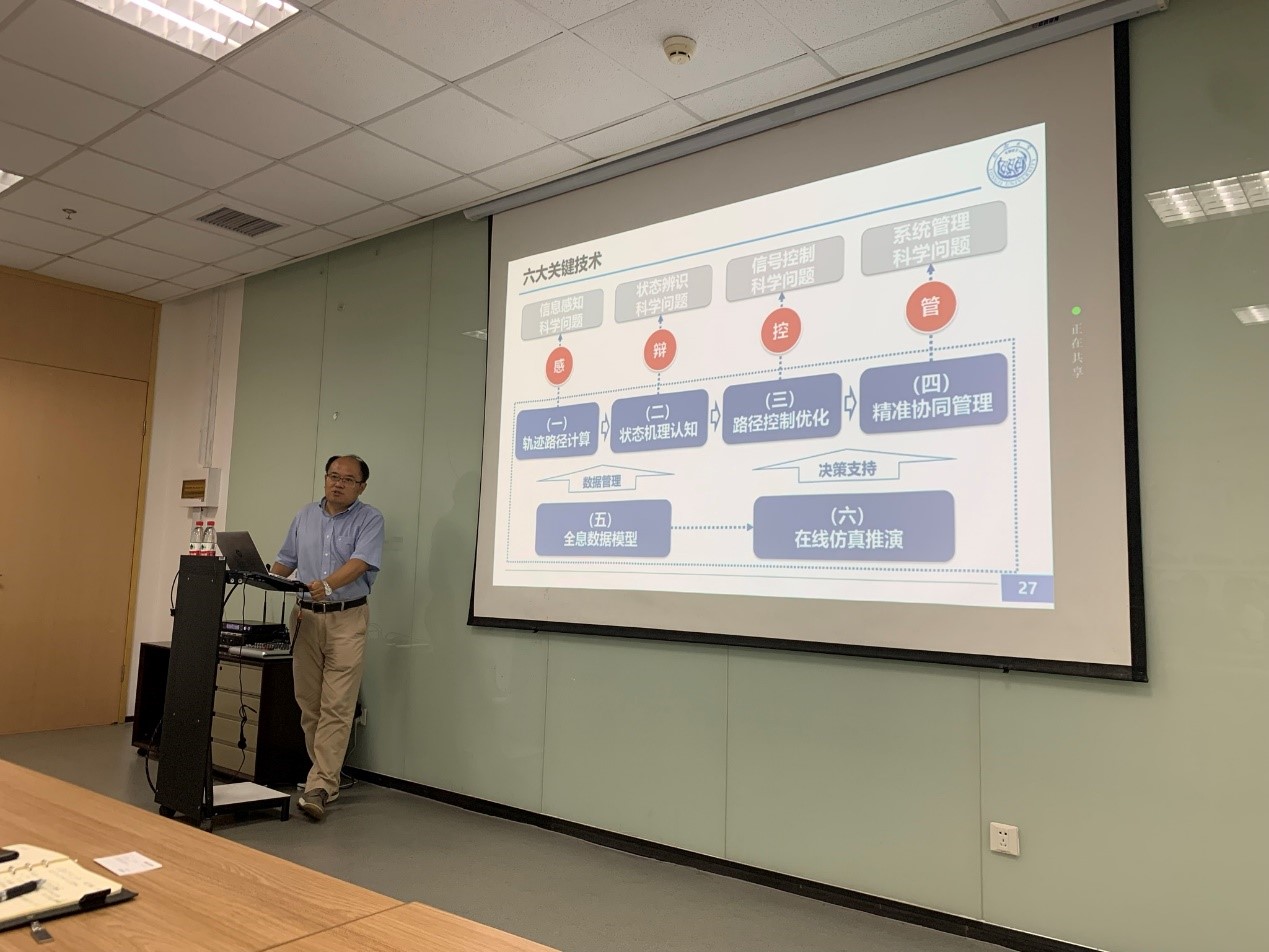
讲座伊始,孙剑教授首先介绍了课题组的基本情况和研究的主要方向,以及TESS NG仿真生态体系的建设进程。然后,对于城市交通管控的现状,孙剑教授从数据采集、状态辨识、决策支持等方面指出了以往基于断面集计数据进行子区控制的局限性,并提出基于轨迹信息的精细化协同管理是新一代管控的发展方向,而电警卡口加浮动车轨迹则是未来可持续的数据采集方式。面对当前存在的机遇与变革,我们从研究与实践中总结出了“感、辨、控、管”四大核心问题,并相应的提出了轨迹路径计算、状态机理认知、路径控制优化、精准协同管理、全息数据模型和在线仿真推演六大技术,致力于实现“用户-中心-前端”架构的平台及场景驱动的跨业务协同,为智能网联环境下的城市交通管控做好准备。
讲座环节
基于上述理念,孙剑教授对课题组的路径重构算法、全息数据模型和在线仿真平台等最新研究成果做了简要介绍,阐述了我们基于精准化的管控对象和精细化的控制方案,通过数据加知识驱动的方法,从而形成评价-诊断-优化的闭环,以及实现多系统间的高效协同的过程。最后孙剑教授强调,车辆轨迹和路径数据将重塑城市交通管控业务,赋能城市交通的精细化治理,他希望能同海康的同事及广大交通从业者们一起,为新一代城市交通管控的发展添砖加瓦。随后,在场的听众积极提问,孙剑教授就轨迹和路径数据在安全领域的应用、在线仿真中效率与精度的权衡、仿真模型参数标定的意义和必要性、雷视设备在交通领域的应用等问题做出了解答并发表了独到的见解和观点。

交流环节
讲座过后,智慧交通组的主管郝勇刚工程师向孙剑教授介绍了海康威视研究院的基本情况和在交通行业的发展与规划,通过案例展示了海康自研的AI Traffic产品以及目前的研发方向,并表达了与课题组达成合作的意愿。孙剑教授盛赞海康威视良好的研究环境、坚实的数据基础和跨行业的庞大体量,期望以此开始双方能够保持交流,并与郝勇刚工程师探讨了后续合作的可能性。
最近更新:2021年9月1日 15:11:06
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}