
| 性别 | 男 | 出生年月 | 1997-07 |
| 年级 | 2019级硕士生 | 籍贯 | 浙江温州 |
| 87369**** | 1931314@tongji.edu.cn |
阅读()
本科:同济大学 交通工程
硕士:同济大学 交通运输规划与管理
智能车测试
乐观
桌游、密室、剧本杀
第十三届全国交通科技大赛一等奖
上海市大学生计算机应用能力竞赛三等奖
“华为杯”第十六届中国研究生数学建模竞赛 二等奖
智能汽车技术在解决交通安全、道路拥堵问题以及改善驾乘体验等方面上具有巨大的发展潜力,具有广阔的市场前景。但是智能车的研发与运营面临着各种复杂挑战和威胁,智能车上路之前必须进行严格的测试,智能车测试是保障智能车正常运营的重要方法。现在最常见,也最容易被研究人员以及大众所接受的测试方法,便是基于自然驾驶的测试方法。这种方法,将智能车放在与人类驾驶员完全一致的驾驶环境中,来比较二者的驾驶能力。兰德公司的研究表面,由于事故是极小概率时间,要证明智能驾驶车辆比人类驾驶员更安全,需要100辆车、24小时全天,连续测试225年,这是不可能完成的任务。我们需要全新的测试框架与方法。
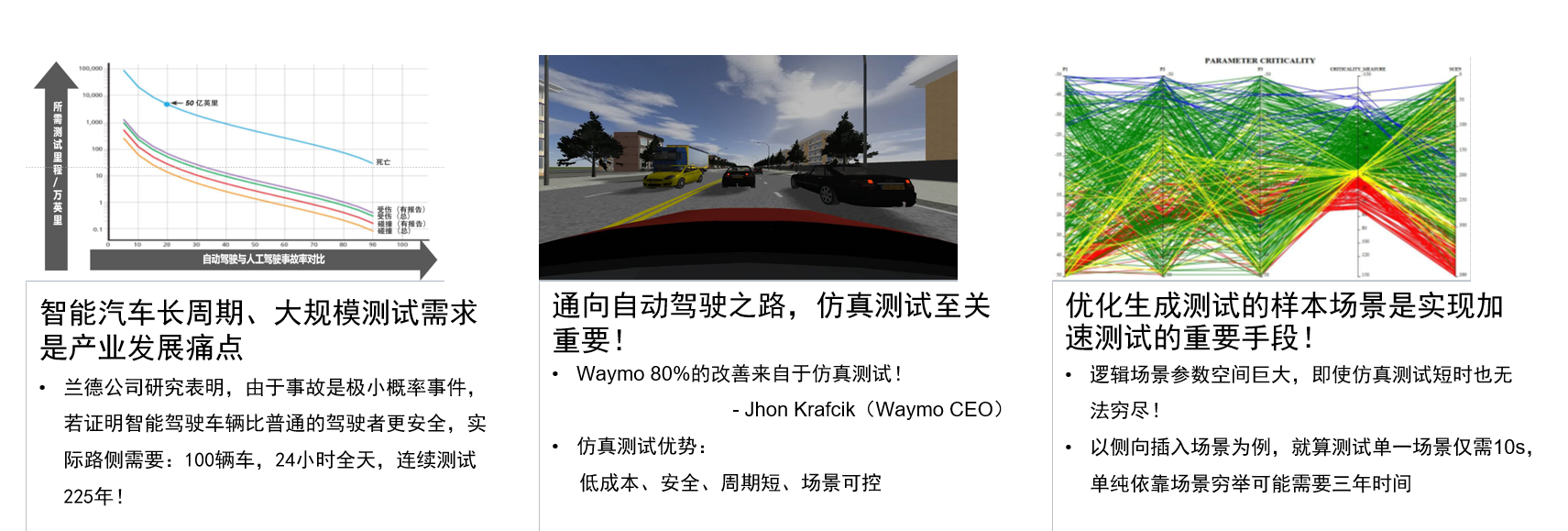
为了克服实地路测中存在的问题,仿真测试被广泛使用。仿真为我们提供了低成本、安全、周期短、场景可控的测试环境,拓展了我们可用的测试手段。Waymo在仿真中一天就能测试800万英里,远多于Waymo在实地路测中一年的测试量。
尽管虚拟仿真测试能够大大加快智能车测试,其依然无法满足测试需求。智能汽车的测试场景由多个动静态要素组成,场景要素的取值变化和相互组合导致具象测试场景(concrete scenario)数量大爆炸。以变道插入测试场景为例:若仅考虑动态(测试车辆速度、横向加速度、变道插入间距、后车速度)、静态(车道宽度)的5个关键要素,当各关键要素各取10个参数值,具象测试场景将达976万余个(5^10=9765625)。若单个测试场景1分钟、虚拟测试加速比为10时,该类场景的遍历式测试共需1.86年(5^10÷(60分钟×24小时×365天×10加速比)=1.86年)。由上可见,在覆盖高测试需求场景的基础上,仍需针对测试场景的多维参数组合开展加速测试方法的创新。为了达到这一目标,我们采用了多种方法,包括重要度抽样以及自适应搜索方法。这些方法显著地加速了智能汽车测试进程。
最近更新:2024年11月4日 18:23:45
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}