交通系统已逐步进入人机共驾、人机混驾的智能网联交通时代。自动驾驶需要合理应对各类复杂交通环境,否则会产生巨大安全风险。由于交通事故是极小概率事件,获得具有统计学意义的事故率需要超过100亿公里的大规模长周期测试。传统实车道路测试无法满足自动驾驶测试需求,亟需开发新型虚拟测试技术。课题组面向自动驾驶测试需求,突破了场景智能化生成、加速测试理论、高精度背景交通流模拟、驾驶能力评价、自主可控测试工具链构建等全栈技术,研发了场景高覆盖、测试可加速、工具可协同、评价可互信的自动驾驶仿真服务系统(SAAS),研发了面向全国高校及研发企业的自动驾驶测试公共服务平台OnSite(OnSite.com.cn)。
1.自动驾驶测试评价技术模块
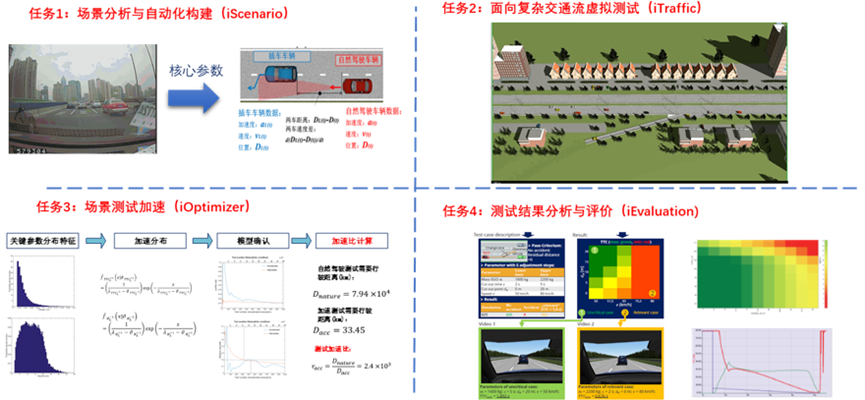
测试评价系统的研发主要面向四大任务,(1)场景分析与自动化建模(iScenario),研究提取自然驾驶关键参数,实现场景的自动化建模与分析,在此基础上利用AI和本体论等方法自动化生成新场景;(2)复杂交通流自动化生成(iTraffic),研究面向自动驾驶安全性测试需求,自动化模拟生成连续式、对抗式双向交互测试场景;(3)场景测试优化(iOptimizer),针对测试场景参数组合爆炸问题,根据场景关键参数分布特征对分布进行加速,模型确认后计算加速比,提升自动驾驶场景测试速度和效率;(4)测试结果分析与评价(iEvaluation),针对自动驾驶安全性、拟人化、交互社会性等多维评价需求,基于海量人类自然驾驶大数据,构建自动驾驶“驾驶能力”评价指标体系。最终力求实现场景自动加载,背景交通可信,加速效果显著,评价体系全面的测试服务系统。自动驾驶测试服务系统与自动驾驶测试工具链深度协同,可满足各类自动驾驶技术的测试评价需求。
自动驾驶测试服务系统

自动驾驶测试工具链
2.OnSite自动驾驶测试公共服务平台
基于上述创新成果,成功研发了可服务不同交通体系、功能完备、普适性强、具备加速测试功能的OnSite自动驾驶测试公共服务平台(onsite.com.cn)。平台以教学中心、场景中心、工具中心、服务中心、比赛中心等五大中心为载体,积极服务国家级测试示范区建设,为自动驾驶技术提供方法普适、标准统一的测试服务。依托OnSite平台比赛中心,成功举办两届自动驾驶算法挑战赛, 吸引全国 80 余所高校400支团队参与,收集2000余版次的算法提交作品,共计完成220万次场景的仿真测试。OnSite平台提供的场景生成、仿真、加速测试等新工具使参赛队伍的算法研究整体水平快速提升,促进了交通工程领域仿真模拟和数据科学融合新研究范式的形成,为推动我国自动驾驶技术发展提供了新思路、新途径。

OnSite平台发展规划
科研课题
国家自然科学基金(52302502):人机混驾冲突场景下考虑主动交互的CAV协同决策方法研究,2024-2026.
国家自然科学基金重点项目(52232015):自动驾驶在线测试理论与共性关键技术测评,2023-2027.
国家自然科学基金重点项目(U1764261):智能汽车路径规划与自主决策理论及关键技术,2018-2021
国家自然科学基金(52172391):面向自动驾驶决策规划的测试场景生成与测评方法研究,2022-2025
国家重点研发计划子课题(2021YFB2501202-4):“自动驾驶多维度加速测试技术”,2022.1-2025.1,
国家重点研发计划子课题(2018YFB1600805):IVIS加速测试与泛化能力提升,2019-2022
中央高校学科交叉重点项目(2022-5-ZD-02):人机混驾群集智能理论与方法,2022-2024.
华为公司:故障注入加速测试技术,2022-2023
上汽集团:面向智能驾驶SIL/HIL仿真测试的场景加速方法研究,2019-2021
之江实验室:复杂交通环境下“自动驾驶能力”评价技术,2021-2022
宇通汽车:驾驶行为特征挖掘与纵向控制算法研发,2019-2020.
华为公司:智能汽车仿真测试创新实验室,2019-2021
腾讯公司:自然驾驶交通场景自动提取与分类研究,2019-2020
德国大陆:自动驾驶安全性测试场景自动提取与场景重构研究,2019-2020
华为公司:智能汽车危险工况测试技术研究(二期),2019-2020
51VR公司:自动驾驶测试典型危险工况仿真技术,2018-2019
PTV公司:智能汽车虚拟测试与人工智能训练方法研究,2017-2018
上海国际汽车城:智能汽车自我学习与人工智能训练系统,2017-2018
上海国际汽车城:智能汽车驾驶场景库分析与加速测试方法,2017-2018
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}