2025年10月29日,TOPS第171期组会于通达馆A211线下举行。本次组会由24级博士李思营、23级博士朱玉寒进行《面向端到端自动驾驶算法测试的场景生成框架》、《基于多任务表示学习的城市内涝治理仿真优化研究》主题的学术报告分享。课题组全体老师同学出席了本次组会。

汇报时刻
会议首先由24级博士李思营作报告。他从研究背景、研究内容、实验验证和总结展望四个方面,系统介绍了自己在三维场景生成方面的最新成果。

研究背景
在研究背景方面,李思营指出现有场景生成的难点:传统仿真、生成模型和三维重建方法,同时面临着一个“不可能三角”,即同时做到高保真、强交互和高实时性。为解决当前研究的这一问题,他指出需要在保证视觉质量的前提下,对资产进行轻量化;此外,在视觉匹配方面,需要实时估算局部光照与阴影。
研究内容
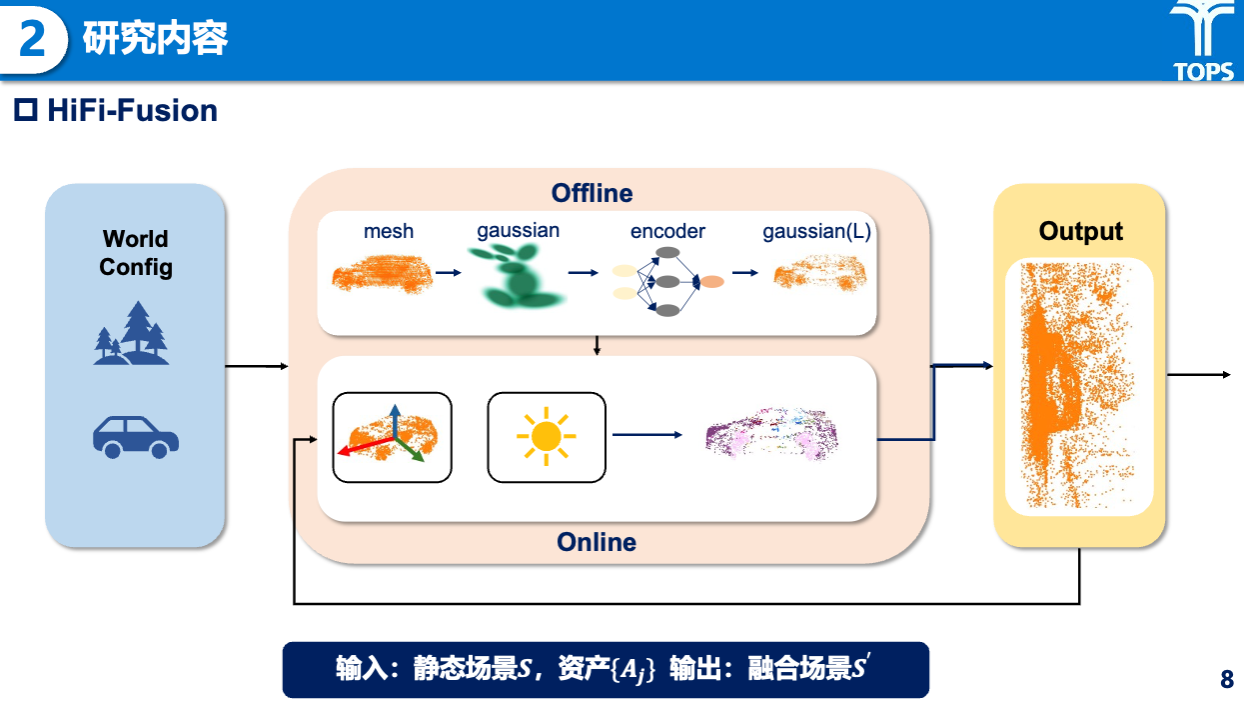
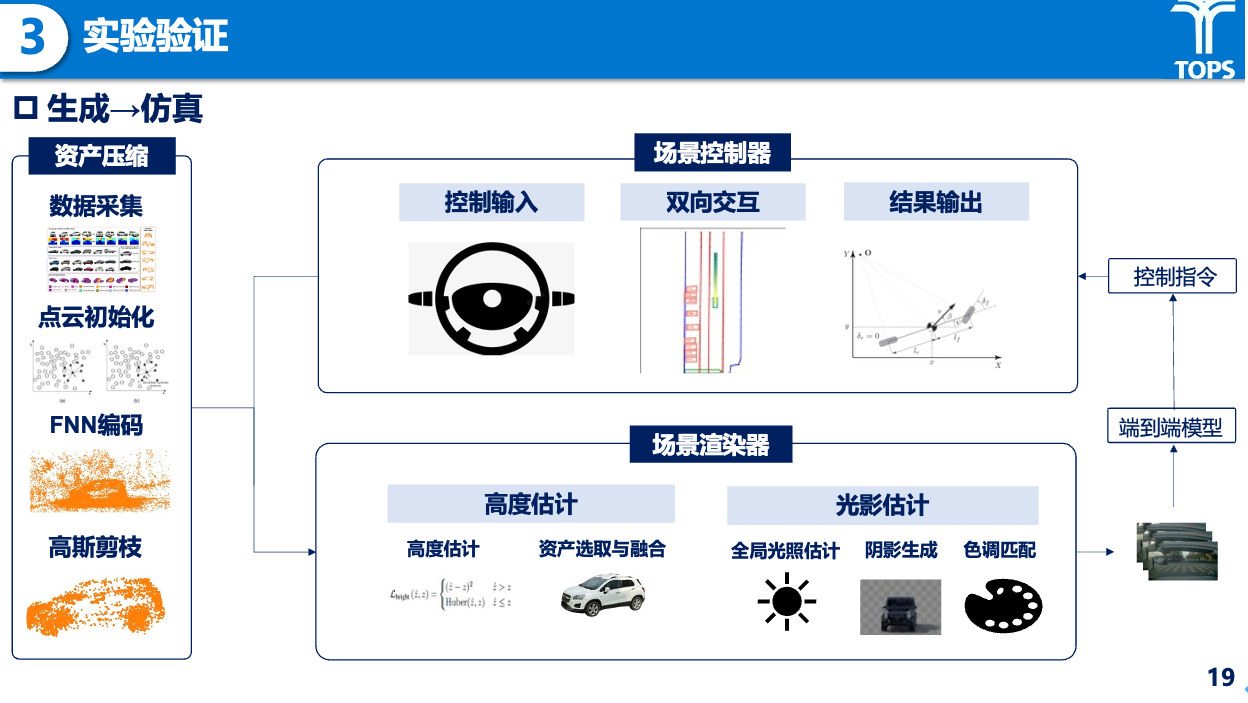
在技术路线方面,李思营提出了一种场景生成框架HiFi-Fusion,基于3DGS实现可控多车交互场景生成,该框架包括离线资产压缩和视觉匹配两个模块。针对离线资产压缩模块,研究在保证视觉质量的前提下,最小化高斯点的数量,从而实现动态资产压缩。针对视觉匹配模块,研究从地面高度估计和光影估计两个方面对视觉匹配进行优化改进。
实验验证方面,李思营首先介绍了数据集、背景车等实验设置,接着阐述了资产压缩和视觉匹配两个模块的效果。研究提出的场景生成框架与SOTA模型HUGSIM进行对比,模型具有输入频率高,保真度高的优点。随后,通过消融实验,证明了资产压缩和视觉匹配模块的作用。
实验验证
接着,李思营将提出的场景生成框架应用于闭环仿真中,采用端到端模型UniAD作为被测对象,实现实时闭环仿真。最后他对自己的研究进行了总结,并从泛化性和对比实验两个方面阐述了自己的后续研究计划。
在提问环节,参会同学就场景生成的数据集的特点,3DGS计算开销,资产压缩具体细节,高斯点云到视频图像的生成流程,进行了深入交流。秦国阳老师对研究的总体流程和研究挑战展开讨论。孙杰老师从场景生成任务为测试任务的服务角度提出了建议。倪颖老师就汇报逻辑与如何将工作闭环给出了优化意见。孙剑老师对场景生成的图片的高度、阴影部分对算法测试的影响提出了建议。

汇报时刻
接着,23级博士生朱玉寒围绕研究背景与现状、问题定义与方法论、实验与分析和下一步工作计划展开自己的研究介绍。
研究背景
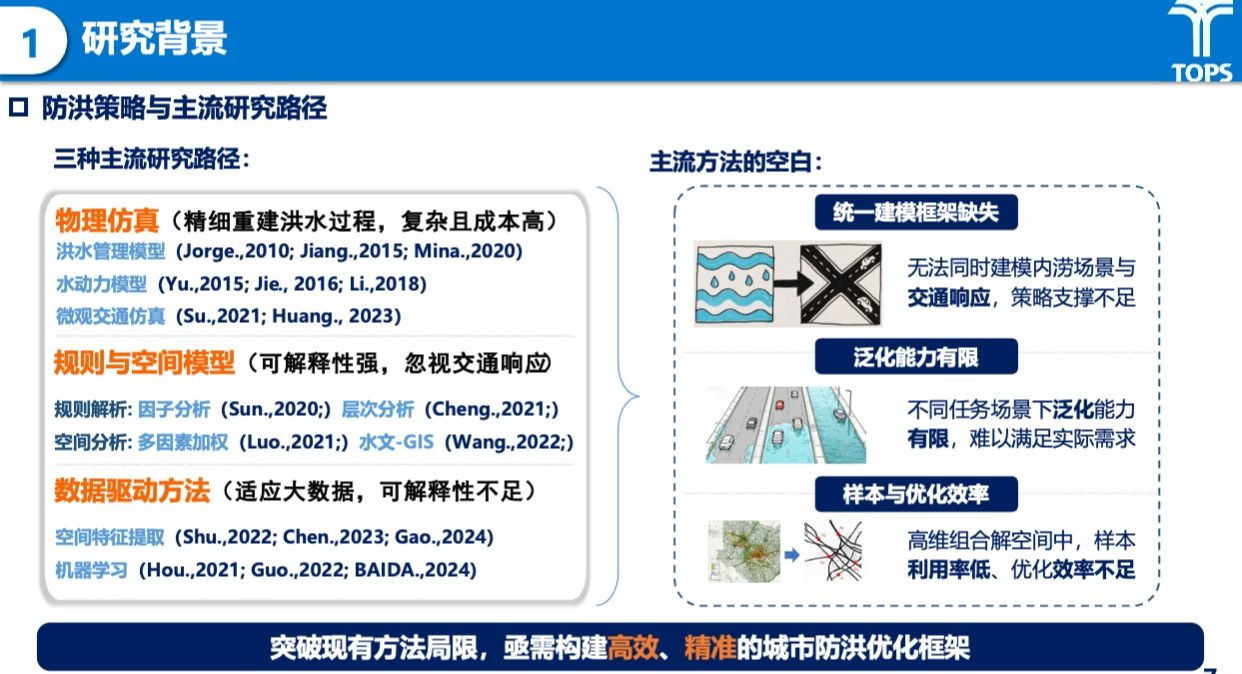
研究背景方面,朱玉寒指出,近些年极端城市洪涝事件发生频率和强度持续上升,但我国目前城市防洪抗灾能力严重不足。主流的研究路径包括物理仿真方法、规则与空间模型和数据驱动的方法,虽然这些方法论各具优势,但在应对复杂城市洪涝优化问题时存在明显缺陷。
研究方法
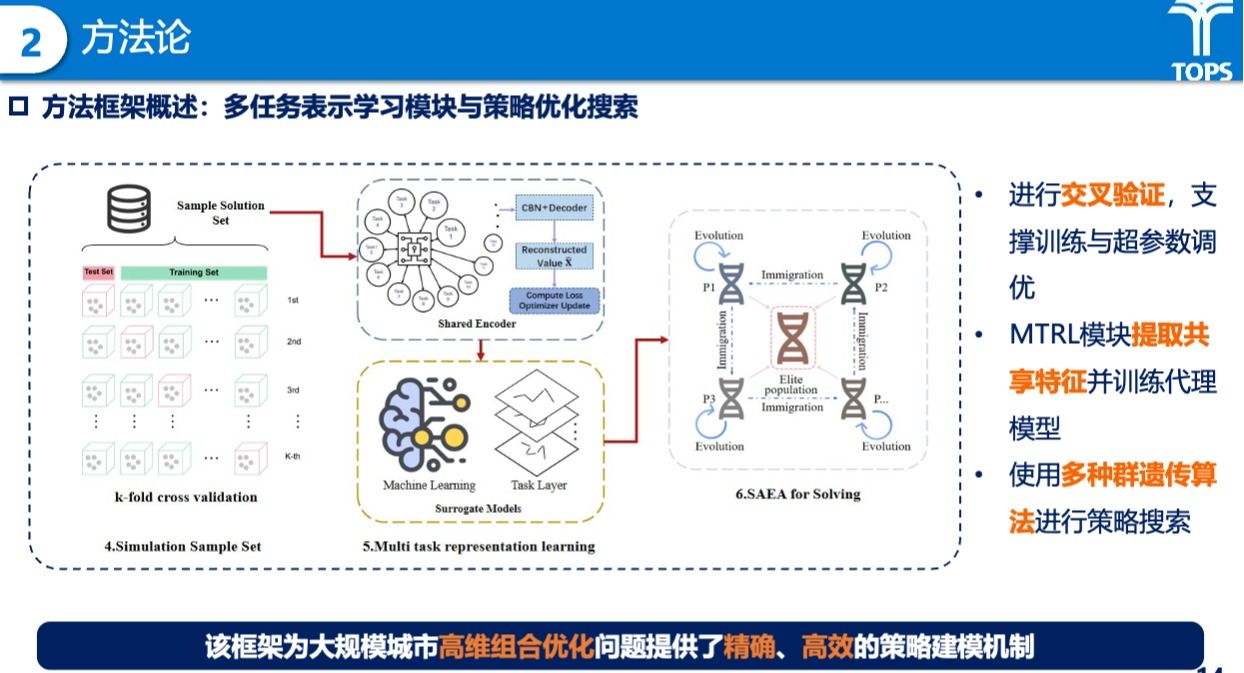
为解决当前的研究挑战,朱玉寒采用仿真优化(SBO)框架来弥补现有路径的关键不足。整体仿真优化框架可抽象为包含仿真模型在内的双层规划,将治理优化任务建模为资源约束组合优化问题。针对仿真优化框架难以求解多场景复杂任务的缺点,研究提出了多任务表示学习模块,为组合优化问题提供了精确、高效的策略建模机制。
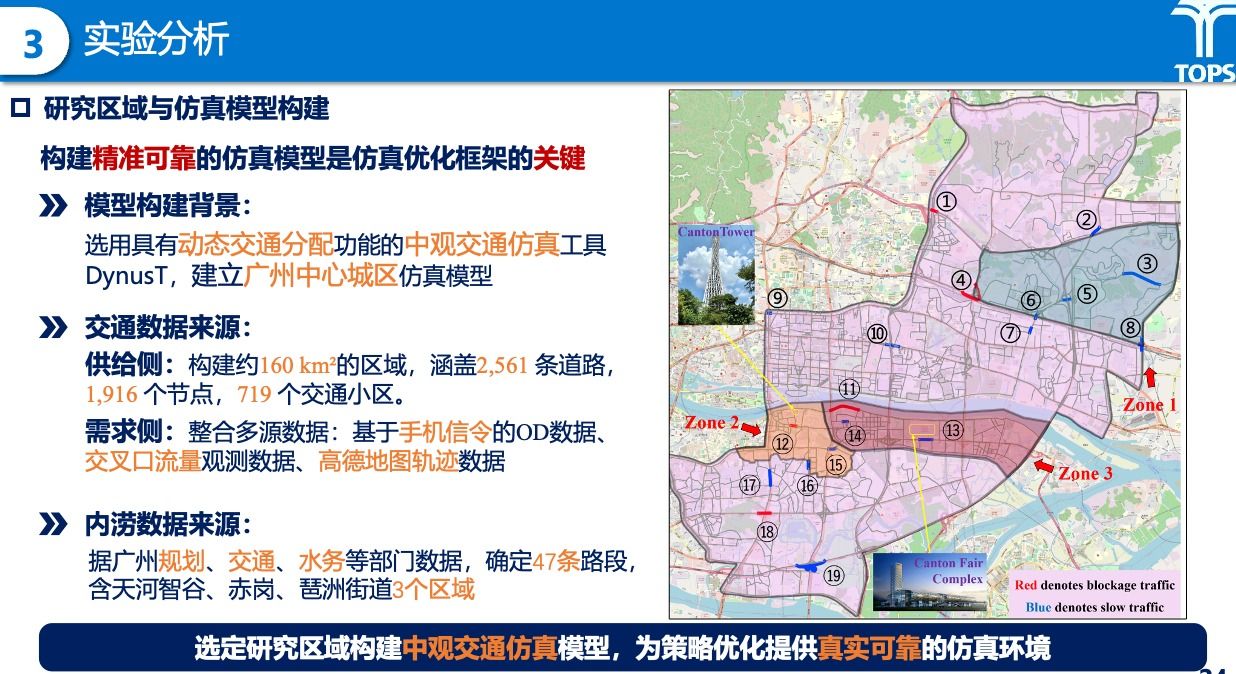
实验分析
实验与分析方面,研究基于中观交通仿真工具DynusT,构建了广州市中心城区的中观交通仿真模型。基于此,研究对几种不同的建模策略的能力进行对比,结果表明多任务表示学习(MTRL)能提升模型性能,可获得更准确且稳定的预测结果。接着,朱玉寒通过分析基础任务共享机制(MTL)、任务感知机制(CBN)的适用性和有效性,证明了提出模块的优势。为评估MTRL-SBO方法的优化能力,研究设计资源受限下的内涝点位疏导实验,实验结果证明了该框架的精度与稳定性,验证了其在城市内涝治理中的应用价值。
朱玉寒在介绍下一步工作计划时指出,后续研究将融合多源数据,扩展模型机制,聚焦于多任务协同优化背景下的“态势感知–策略优化”问题。在提问环节,参会同学对模型的可迁移性、多任务表示学习模块提出了深入的交流。秦国阳老师就多任务框架的应用价值,以及仿真优化策略相较于人类决策的独特优势提出了建议。孙杰老师围绕策略的具体形式与仿真优化的必要性展开了深入探讨。孙剑老师则对文献综述的逻辑结构及仿真优化工作的创新性提出了建设性意见。整场会议在浓厚的学术氛围中圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}