2025年10月15日,TOPS第170期组会于通达馆A102线下举行。本次组会由24级硕士王洁和赵宇家进行《面向接管提示优化的驾驶人认知过程建模》、《面向自动驾驶测试的高可信AV-VRU交互场景生成方法研究》主题的学术报告分享。课题组全体老师同学出席了本次组会。
汇报时刻
会议首先由24级硕士王洁作报告。他从研究背景、研究内容、结果分析和研究总结四个方面,系统介绍了自己在面向自动驾驶安全接管方面的最新成果。
研究背景
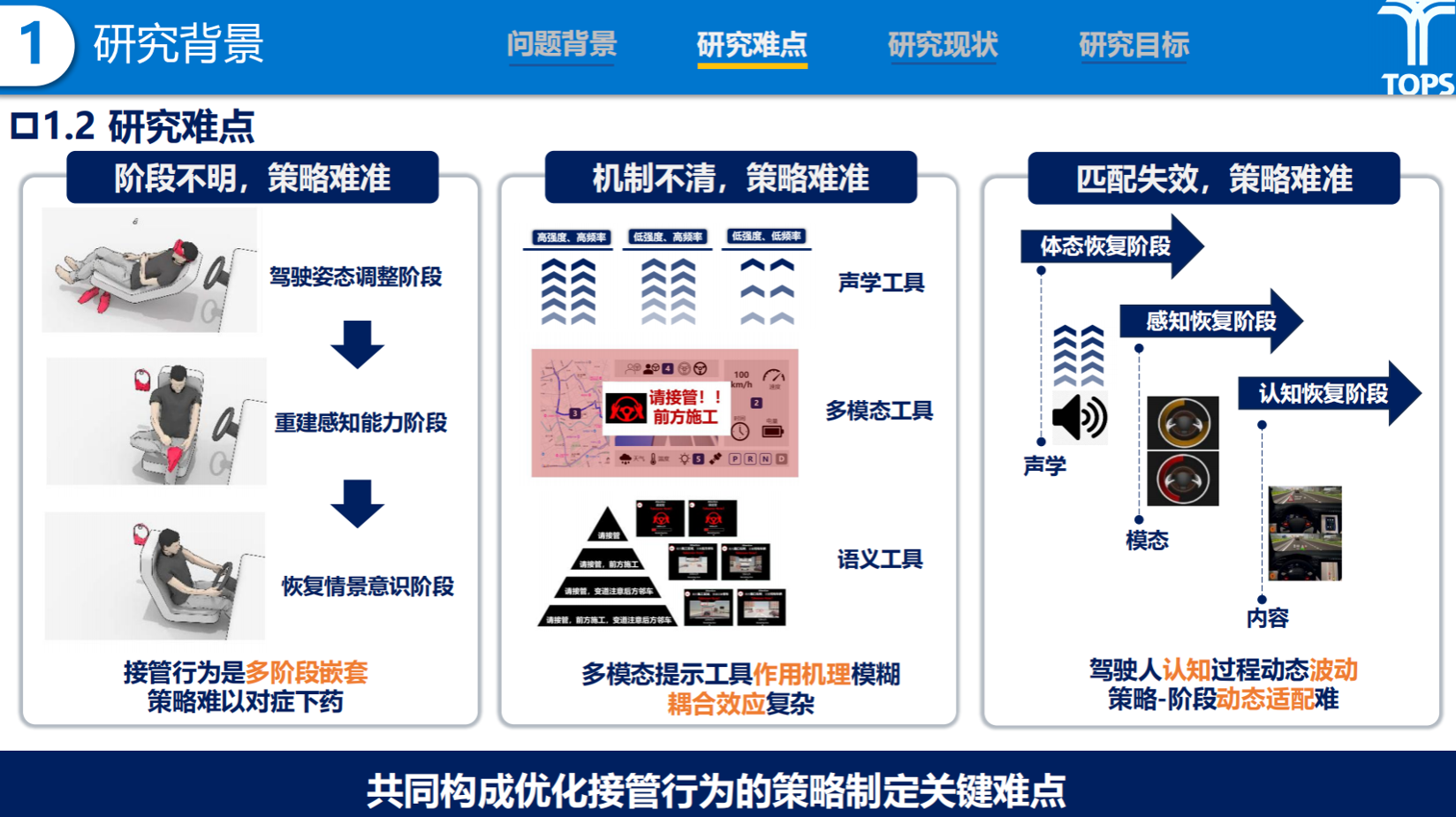
在研究背景方面,王洁指出,当前自动驾驶系统在控制权接管过程中常面临“提示强度不足”或“信息过载”的两极化问题,导致驾驶人警觉性不足或认知超载,成为接管失效的重要诱因。

研究内容
为解决这一难题,她提出了以驾驶人认知过程为核心的提示策略优化框架。研究将接管行为划分为体态恢复、感知恢复、认知恢复三个阶段,并基于多模态生理信号构建了可实时监测的认知状态模型。通过引入QN-MHP认知建模方法,实现了感知、认知与运动子网络的耦合建模,从而模拟驾驶人对提示信息的反应路径与时序特征。
研究内容
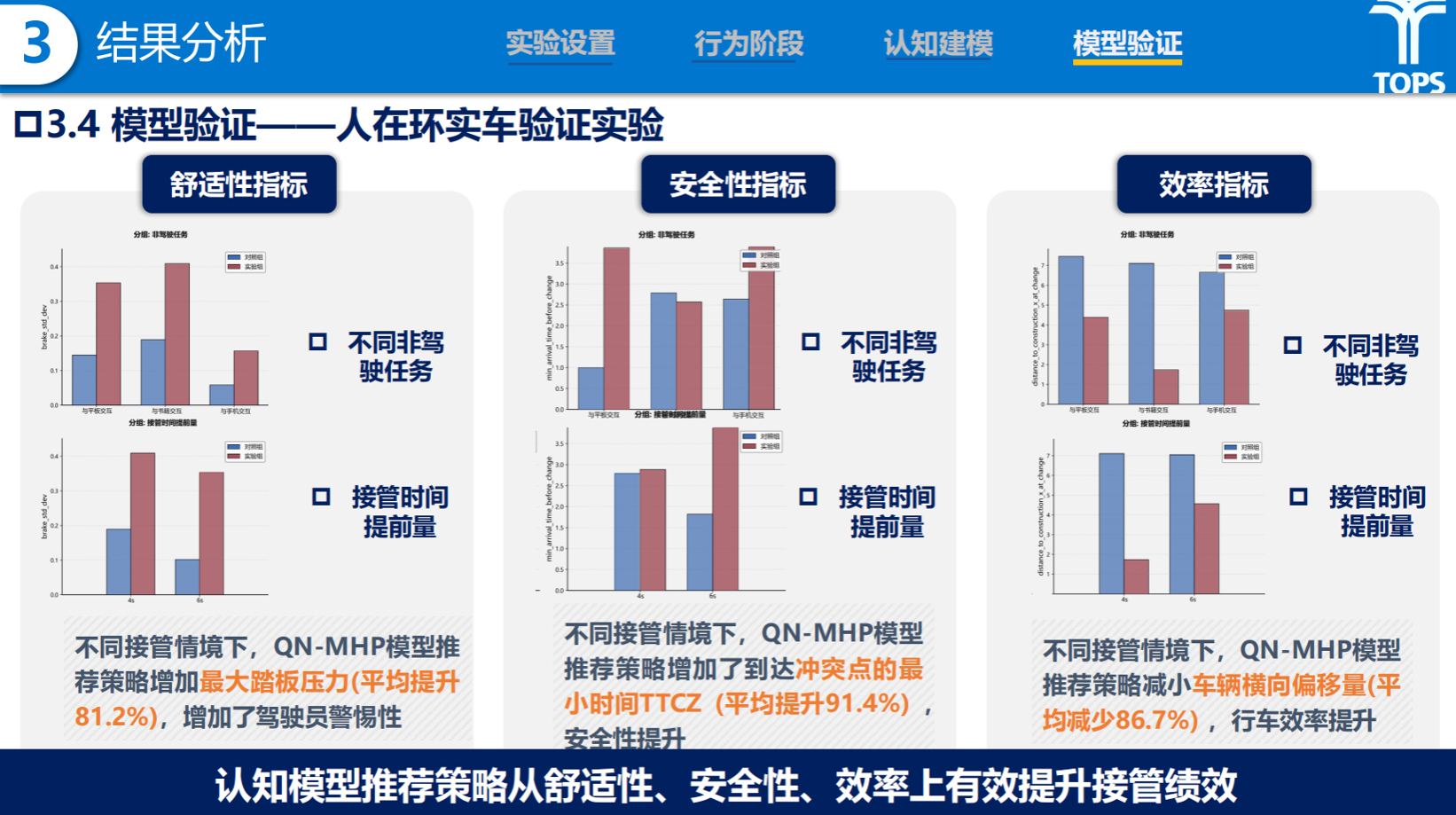
在实验层面,王洁建立了基于反应时间与接管绩效的联合评价体系,并利用高斯混合模型(GMM)识别驾驶人接管中的瓶颈阶段。结果显示,结合声学、语义与视觉模态的动态提示策略,可显著缩短驾驶人反应时间并提升接管安全性。研究最终提出了“阶段-策略动态匹配”机制,为实现个性化接管提示和人因友好的自动驾驶人机交互提供了新的思路。

研究内容
在讨论环节,参会师生就认知模型参数优化、策略自适应机制及实验验证设计进行了深入交流,对研究的科学性与应用价值给予高度评价。
汇报时刻
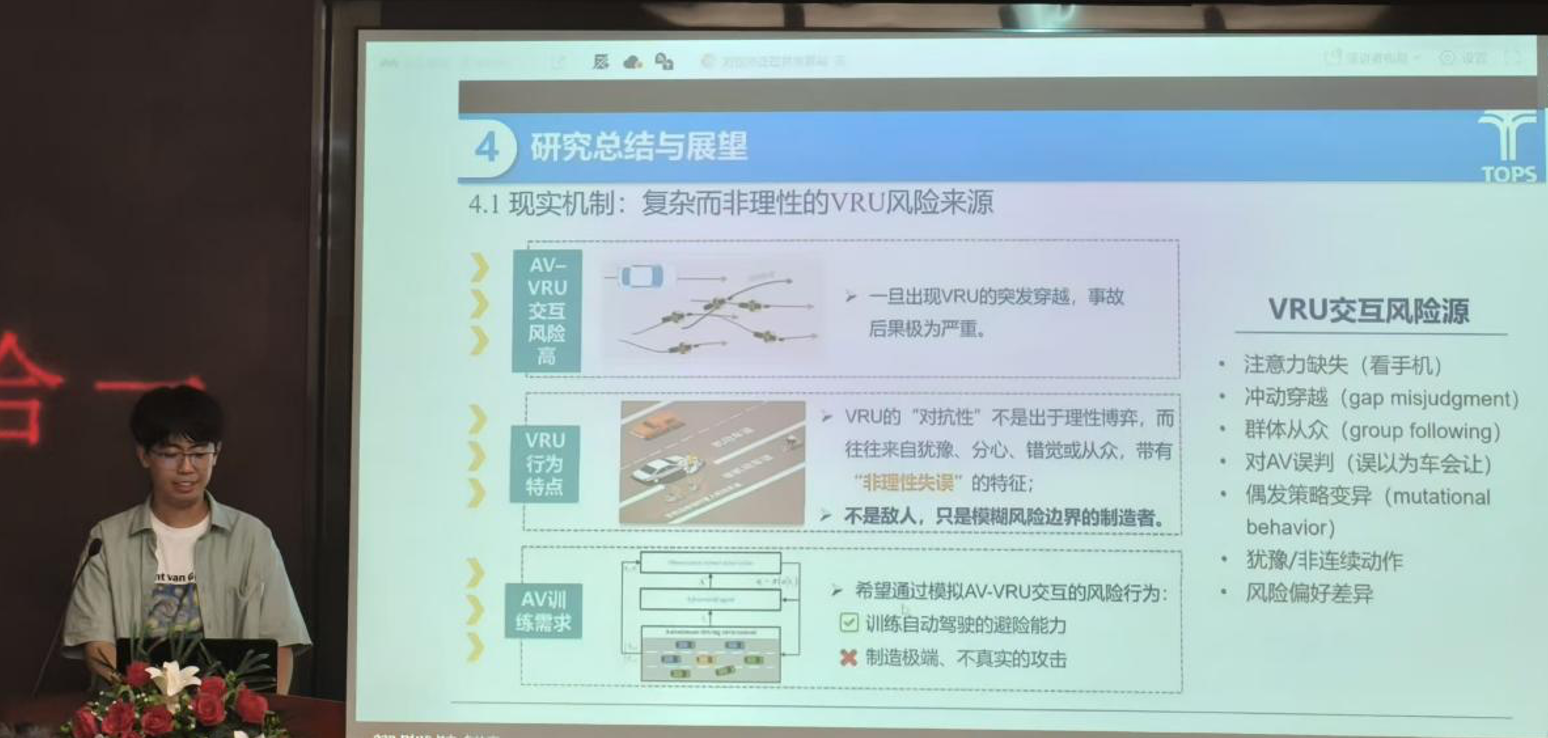
接着,24级硕士赵宇家聚焦于自动驾驶测试中AV(自动驾驶车辆)与VRU(弱势交通参与者)交互场景的高风险建模问题展开自己的研究介绍。

研究内容
赵宇家指出,当前城市道路测试中AV–VRU交互事故频发,而自然采集数据中高风险样本稀缺、现有测试场景覆盖不足,亟需新的高可信场景生成方法。
研究内容
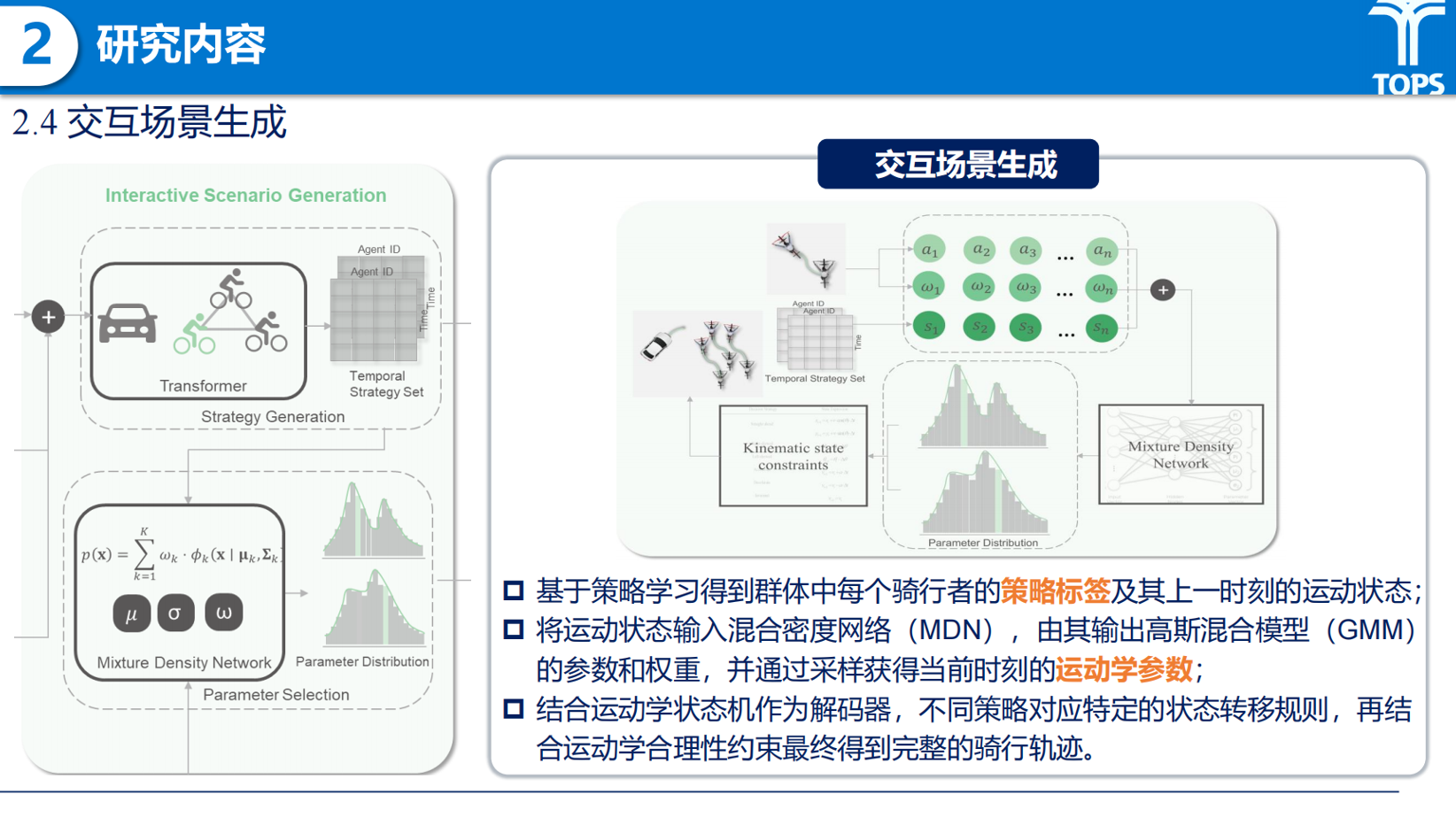
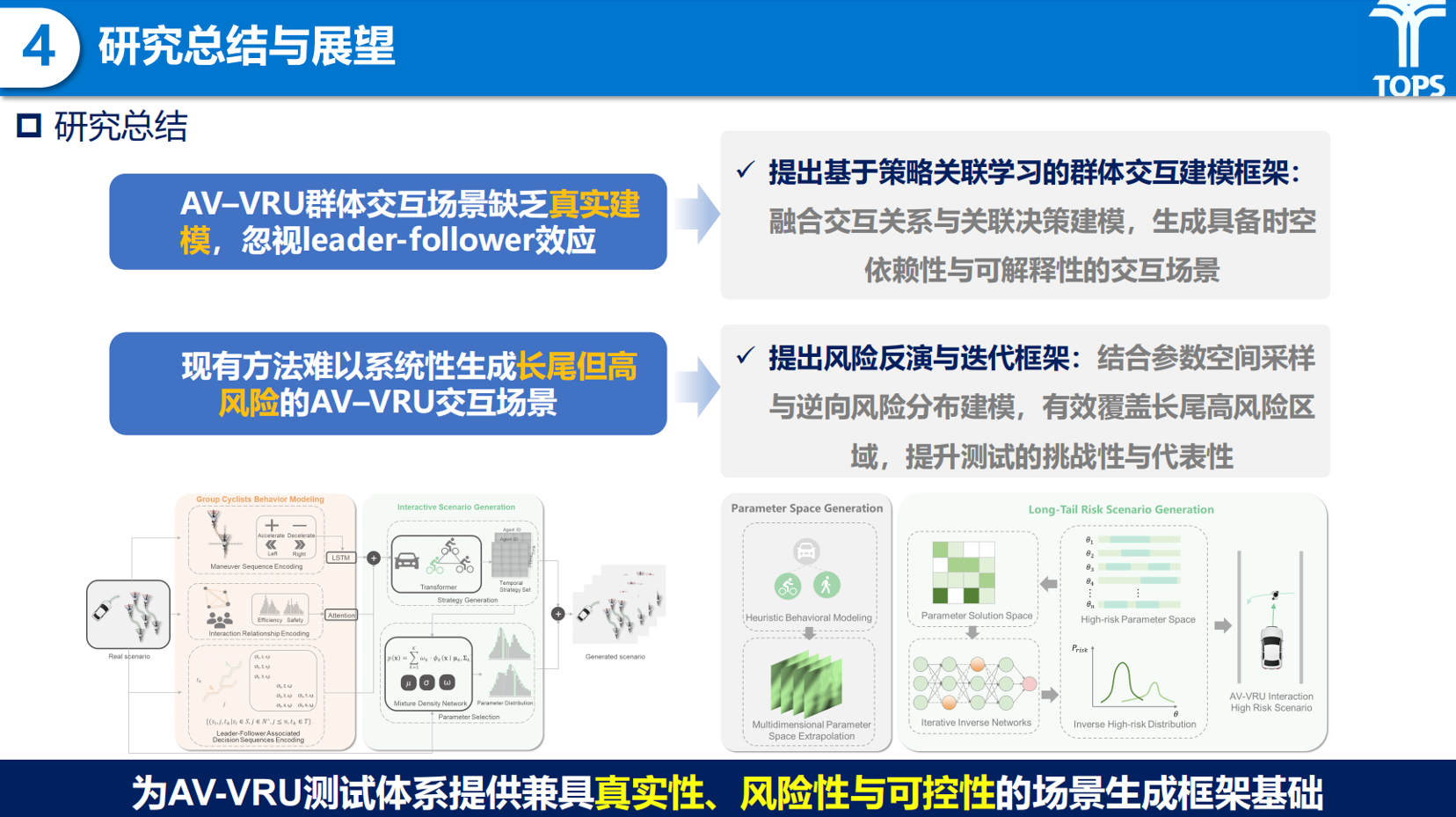
为此,他提出了一个融合群体行为建模、风险反演与迭代优化的系统性框架。研究首先从真实交通视频中提取871条非机动车轨迹数据,基于关联策略学习方法,刻画了骑行群体中“领航–从众”行为的动态关联效应,并通过混合密度网络(MDN)与运动学状态机生成多样化的高保真交互场景。
研究内容
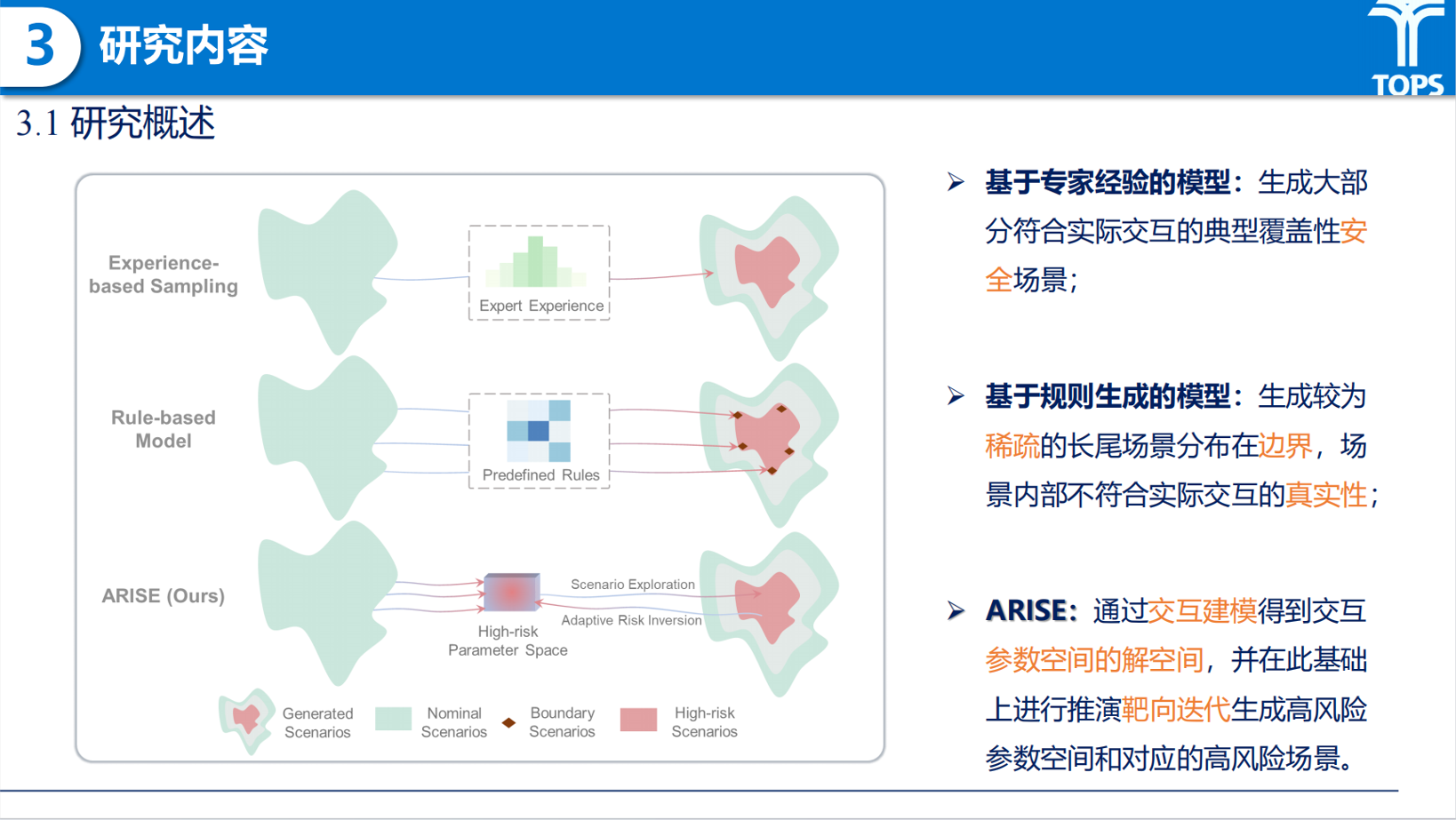
在此基础上,报告进一步提出了ARISE高风险场景生成框架。该框架通过启发式行为建模与参数空间推演,结合LightGBM风险识别与DBSCAN聚类算法,实现了从单参数到多参数组合的高风险区间识别与反向推演。生成的测试场景在真实性指标(JS散度<0.05)与轨迹精度指标(ADE=0.78m, FDE=1.53m)上均显著优于传统模型,能够高保真地重现真实交通中的复杂交互。
研究内容
赵宇家最后总结道,该研究为构建可解释、可控且高可信的自动驾驶测试体系提供了新思路,有助于推动自动驾驶从仿真验证向现实场景的安全落地。
本次聚焦于人因认知建模与高风险场景生成两大前沿方向。两位汇报人分别从“人—机交互优化”与“场景测试智能化”角度切入,展现了TOPS课题组在自动驾驶领域的最新探索。两位报告人的分享既有深度又有广度,为课题组师生带来了新的启发与思考。会议在浓厚的学术氛围中圆满结束。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}