2024年12月11日下午,TOPS第154期组会于通达馆A102线下举行。本次组会由22级博士梅月雯、23级博士刘懿如带来自己的博士学位开题汇报相关内容,他们分别与大家讨论交流《基于缺陷测试的自动驾驶算测双向进化方法研究》和《自动驾驶紧急控车行为实验与建模》的相关内容。课题组全体老师同学出席了本次组会。

汇报时刻
梅月雯同学从研究背景与目标、研究现状、研究内容、预期成果与工作计划几个角度展开汇报。
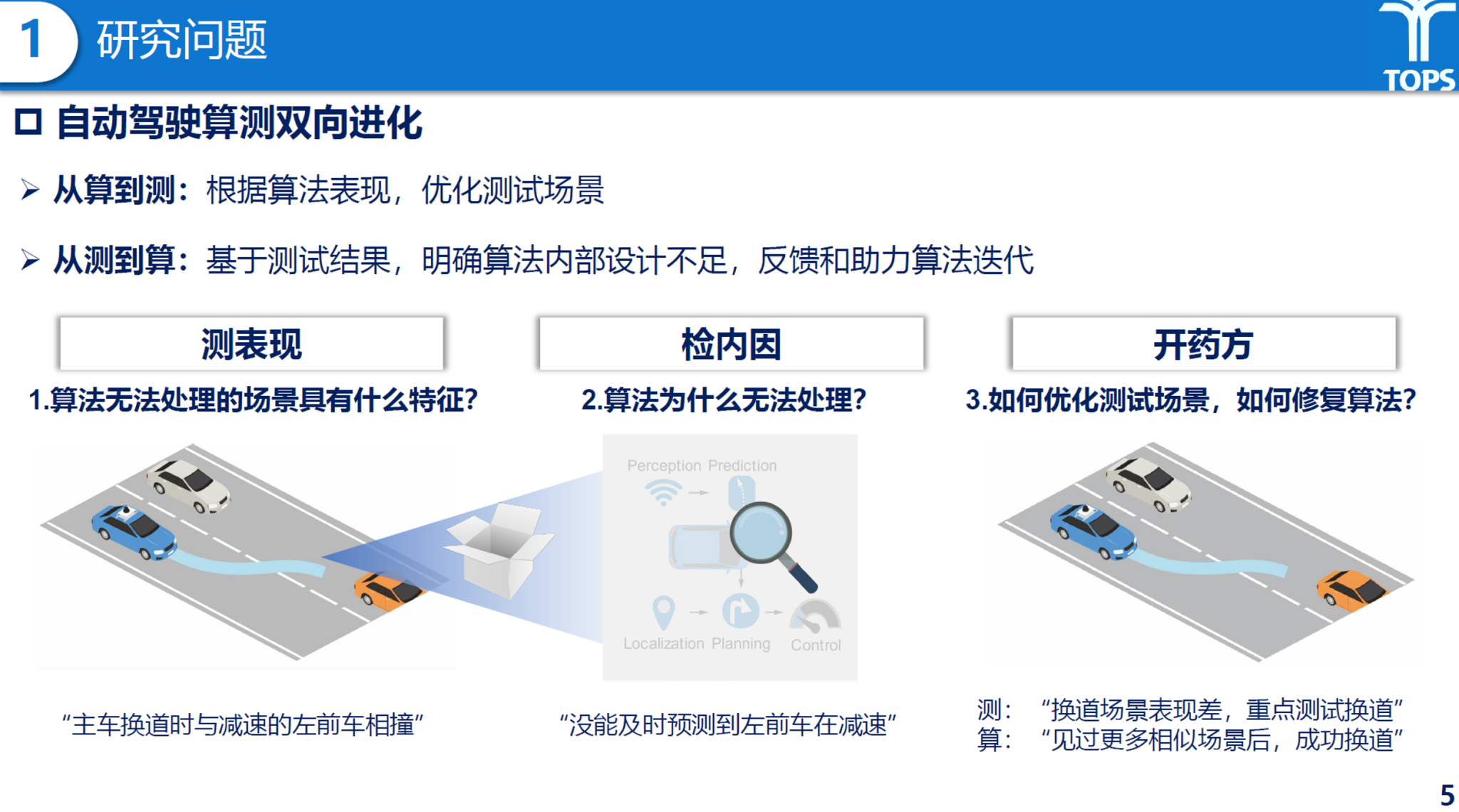
梅月雯同学首先指出,自动驾驶技术快速发展,但其安全性问题成为公众关注的焦点,科学的测试与评价成为推动技术进步的关键。当前自动驾驶算法需高频更新,但现有测试场景资源消耗大,难以保障测试质量,因此亟须构建适用于自动驾驶算法迭代升级的算测双向进化方法。在此背景下,梅月雯同学提出了“测表现、检内因、开药方”的算测双向进化路径,并通过自动驾驶缺陷测试实现双向进化。
研究内容
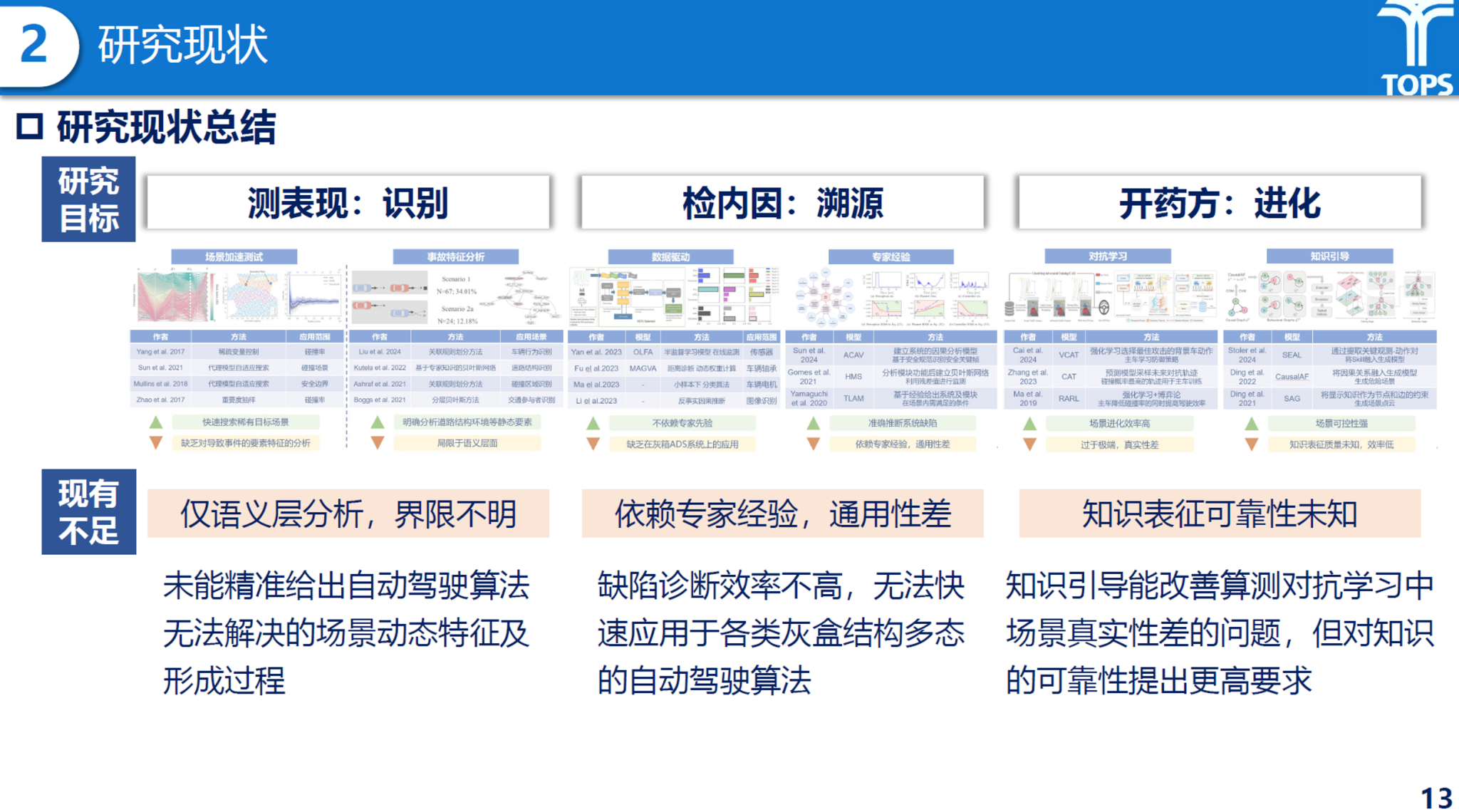
随后,梅月雯同学对“测表现”、“检内因”、“开药方”三个层次的现有研究进行总结。在测表现(关键场景特征识别)上,现有方法能快速搜索稀有场景,但缺乏对事件关键要素及特征的深度分析,仅限语义层面。在检内因(缺陷诊断)上,数据驱动和专家经验方法常用于诊断,但在灰盒ADS上的应用缺乏通用性。在开药方(算法训练和场景进化)上,对抗学习提升场景进化效率,但场景真实性欠佳。知识引导增强场景可控性,但其可靠性与效率仍需提升。
研究内容
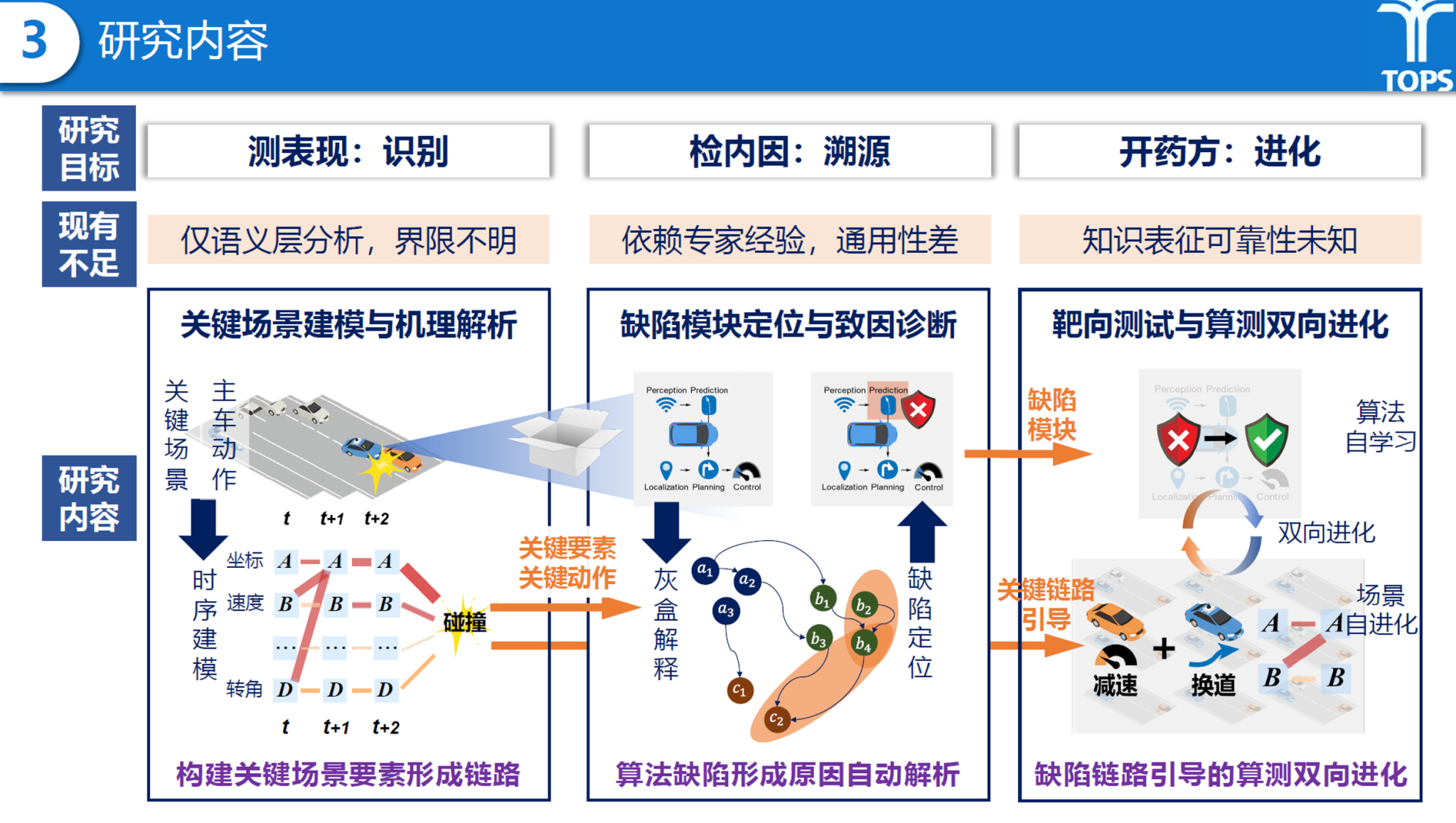
在研究内容上,梅月雯同学同样从“测表现”、“检内因”、“开药方”三方面进行介绍。在“测表现”上,通过提取被测算法无法处理的关键场景,构建时序因果链路模型并识别关键要素和关键动作。在“检内因”上,基于算法结构因果图与反事实推断和优化采样方法,定位导致算法错误的关键模块与变量,实现算法的自动诊断。在“开药方”上,通过关键链路引导场景的自进化和算法的自学习,构建双向进化框架,提升测试场景的针对性与危险性,并增强算法鲁棒性。
研究内容
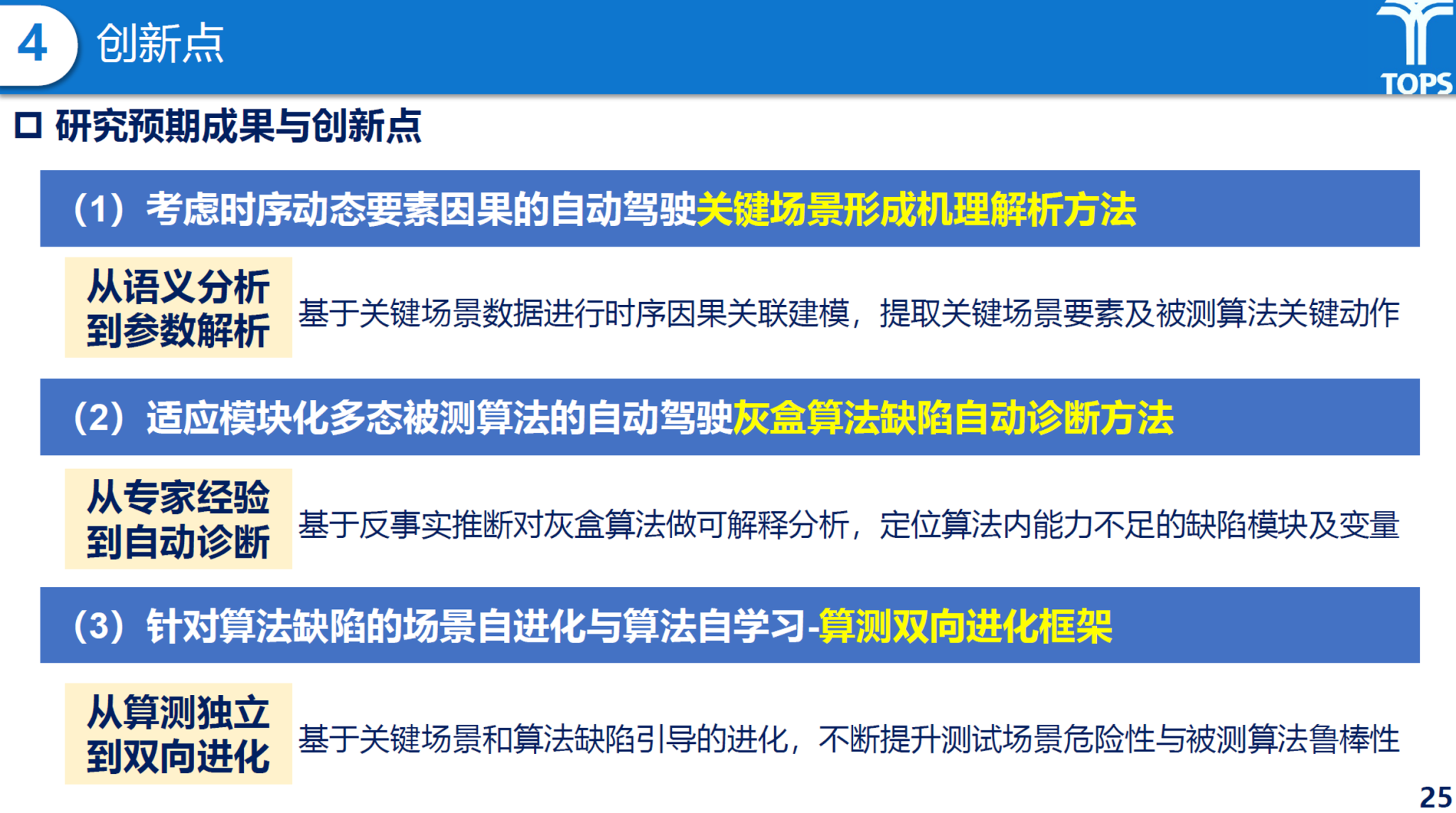
最后,梅月雯同学对研究的创新点进行了总结,包括动态因果建模、反事实推断的应用以及算测深度融合的实现。在数值实验中,该框架展现出了显著的优势,不仅能够快速识别高危场景,还能针对不同算法模块提供定制化的优化方案。未来,这一研究有望为自动驾驶技术的规模化落地提供重要支持,并推动相关监管平台的建立。
研究内容
随后,刘懿如同学详细介绍了她的课题《自动驾驶紧急控车行为实验与建模》。该研究围绕自动驾驶紧急控车场景中的安全性与有效性展开,通过实验设计、环境建模与运动规划等多个层次,探讨如何在复杂动态场景中实现车辆的紧急控车决策。

汇报时刻
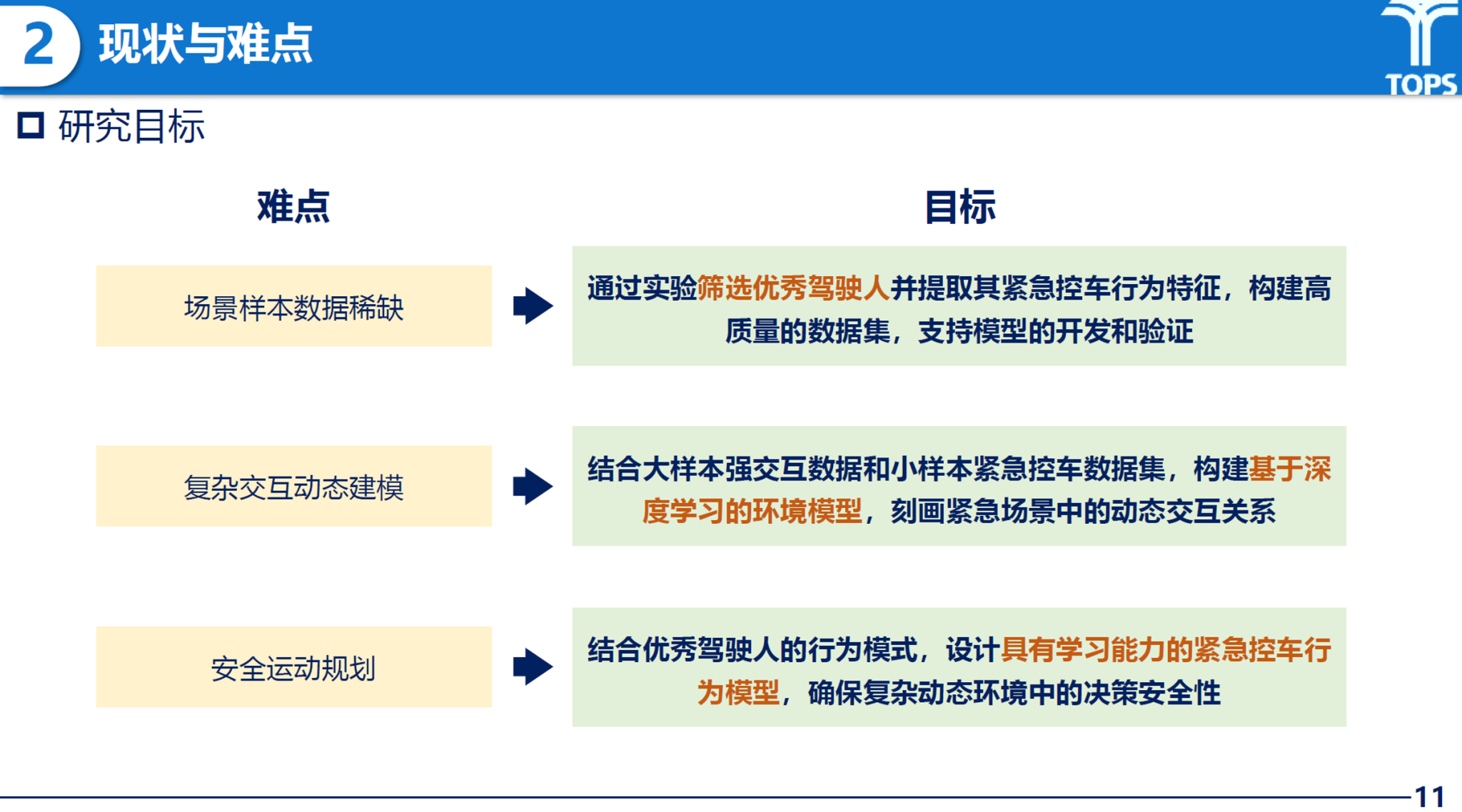
刘懿如同学的研究背景聚焦于自动驾驶车辆在系统失效或驾驶员未能及时接管情况下的应急需求。紧急控车系统作为独立的冗余模块,是确保车辆从高风险状态平稳过渡至最小风险状态的核心。然而,现有控车系统在面对复杂场景时仍难以满足需求。为此,刘懿如同学提出了一整套解决方案,包括构建优秀紧急控车行为数据集、环境动态建模及多交互对象的紧急控车运动规划模型。

研究内容
在研究现状方面,刘懿如同学指出,当前自然驾驶数据中紧急场景的样本分布极为稀疏。大规模自动驾驶数据集中强交互事件占比不足5%,事故或紧急场景的比例更是低于0.01%.此外,传统的紧急场景建模方法(如概率模型与基于规则的规划方法)难以刻画高动态、高交互环境中的复杂行为。尽管深度学习方法展现出较强的特征提取能力,但其固有的不可控性也导致紧急场景的安全性难以得到严格保障。针对紧急控车中的数据稀缺、动态建模与规划难题,研究提出了一系列创新性解决方案。
研究内容
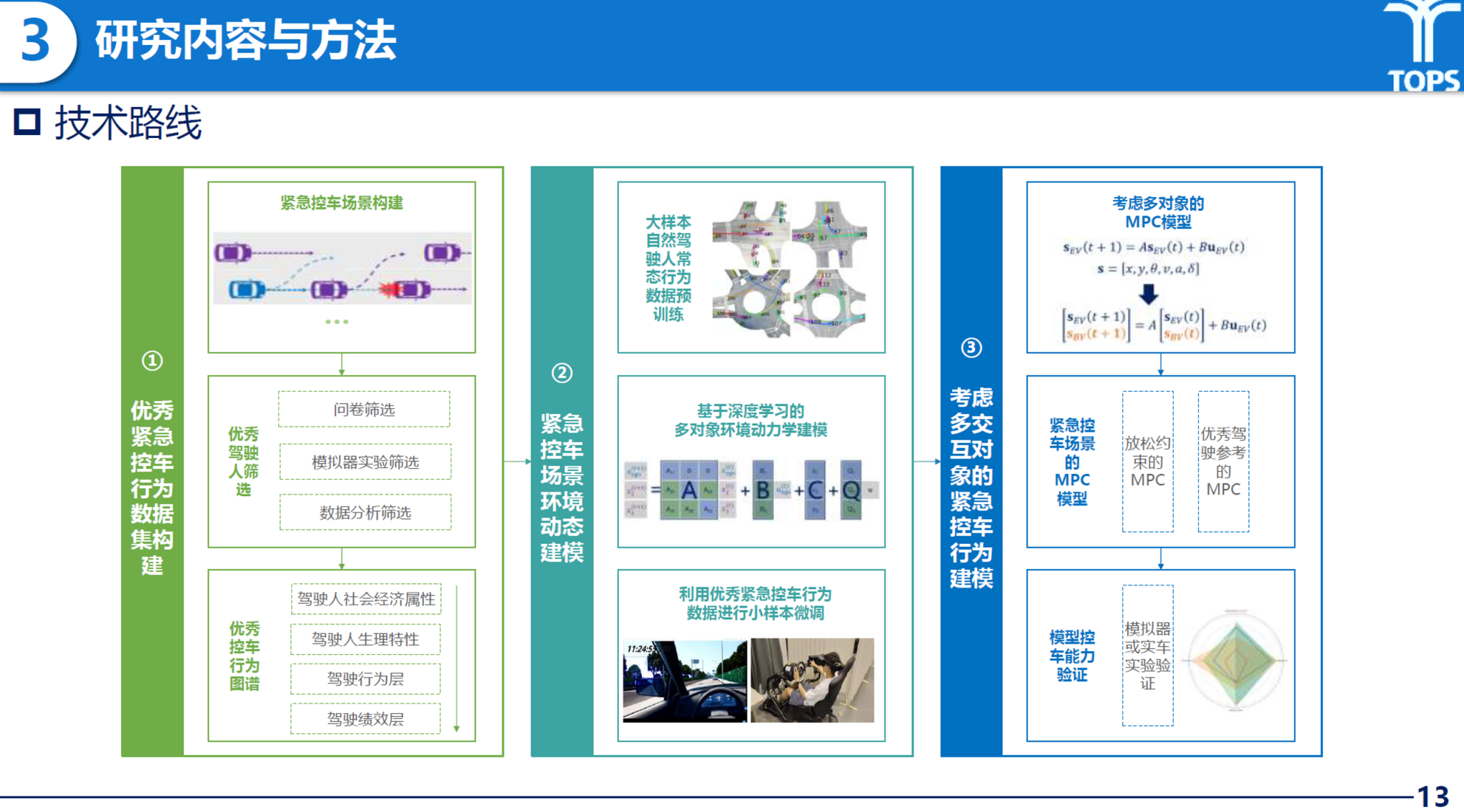
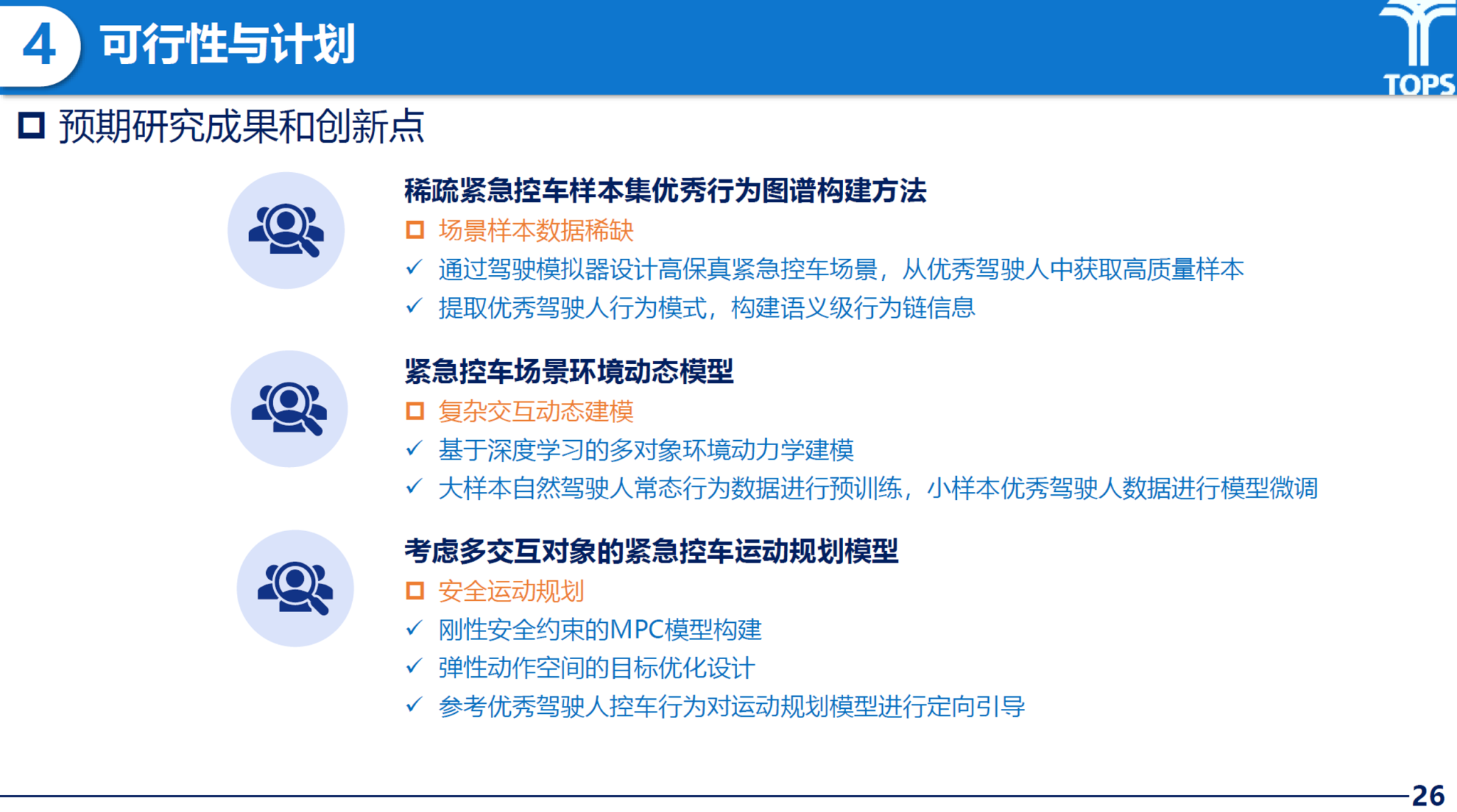
为解决上述难题,刘懿如同学的研究从优秀控车数据集构建、环境动态建模和紧急控车运动规划三个方面展开。研究构建了涵盖四大关键场景的紧急控车行为数据集,并通过提取驾驶行为语义链,实现对优秀驾驶行为特征的精细分析。在建模环节,研究提出基于深度学习的多对象环境动力学建模框架。该框架利用大样本自然驾驶数据进行预训练,并结合小样本紧急控车数据进行微调,确保模型对稀疏场景的高适应性。运动规划模型则通过引入刚性和弹性安全约束,优化紧急情况下的动作空间,并借助优秀驾驶人行为基元为运动规划提供参考。
研究内容
刘懿如同学表示,这一研究的最终目标是通过数据驱动与实验设计相结合,建立高保真的紧急控车行为数据集与模型体系,为未来自动驾驶车辆的安全决策提供全新的方法论支持。研究计划将在未来三年内完成数据集构建、环境建模与模型验证等多阶段目标,并结合模拟器或实车实验实现技术落地。
研究内容
在两位同学的研究分享之后,课题组的老师和同学们进行了深入的交流讨论。孙剑老师、田野老师、杭鹏老师针对实验方案提出了宝贵的意见,强调需要在测试过程中考虑更广泛的交通场景与复杂交互,并且要确保被测对象的代表性与模拟的真实感。同时,部分同学也提出了关于实验数据采集、模型调优等方面的具体问题,大家在讨论中深入交换了各自的观点。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}