2024年11月28日,TOPS第153期组会于通达馆A102线下举行。本次组会有幸请到浙江大学研究员朱政老师、23级硕士刘林坤带来自己的研究汇报,他们分别与大家讨论交流《交通运输人机实验研究》和《基于信号传递博弈的EHMI作用机制研究》的相关内容。课题组全体老师同学出席了本次组会。

汇报时刻
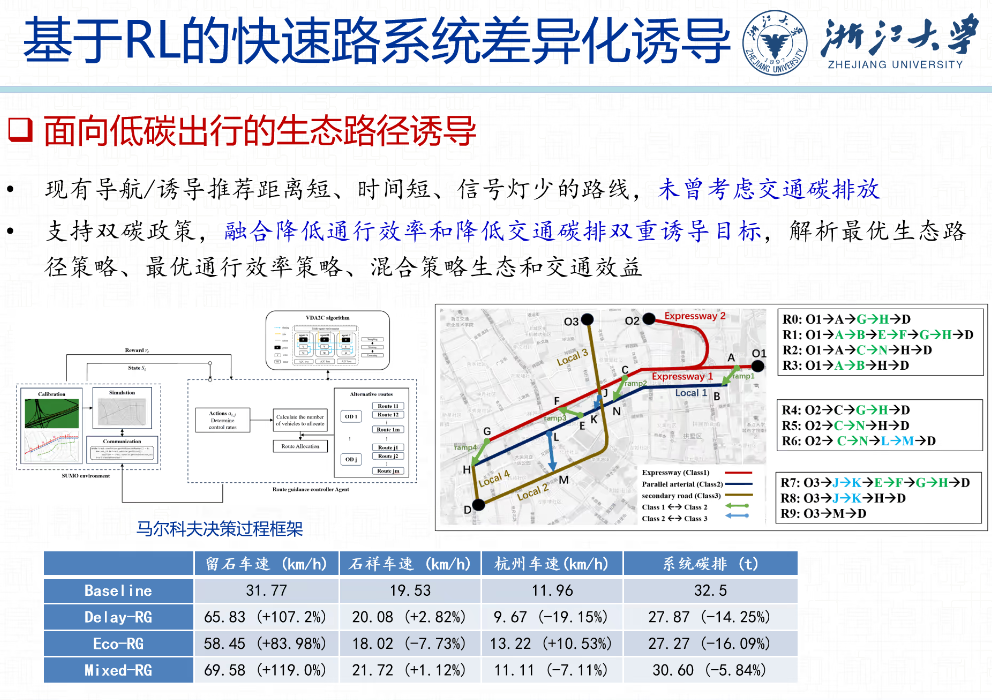
朱政老师首先介绍了浙江大学交通运输人机共进实验室的研究成果,如一项基于强化学习(RL)的智能交通新研究,提出了一种旨在支持低碳出行的生态路线诱导方法。与现有导航系统主要追求最短距离、时间或信号灯最少的路径不同,该系统特别考虑了通行效率与交通碳排放的综合目标,探索了一种兼顾环保与效率的智能导航策略。研究中,团队设计了一种双碳策略模型,融合了降低交通碳排放与提高通行效率的双重目标,并利用强化学习算法解析最优生态路线策略。通过对不同路径的交通效益与生态效益进行量化评估,该系统可以实现混合策略导航,最大化地优化出行体验与环保收益。
研究内容
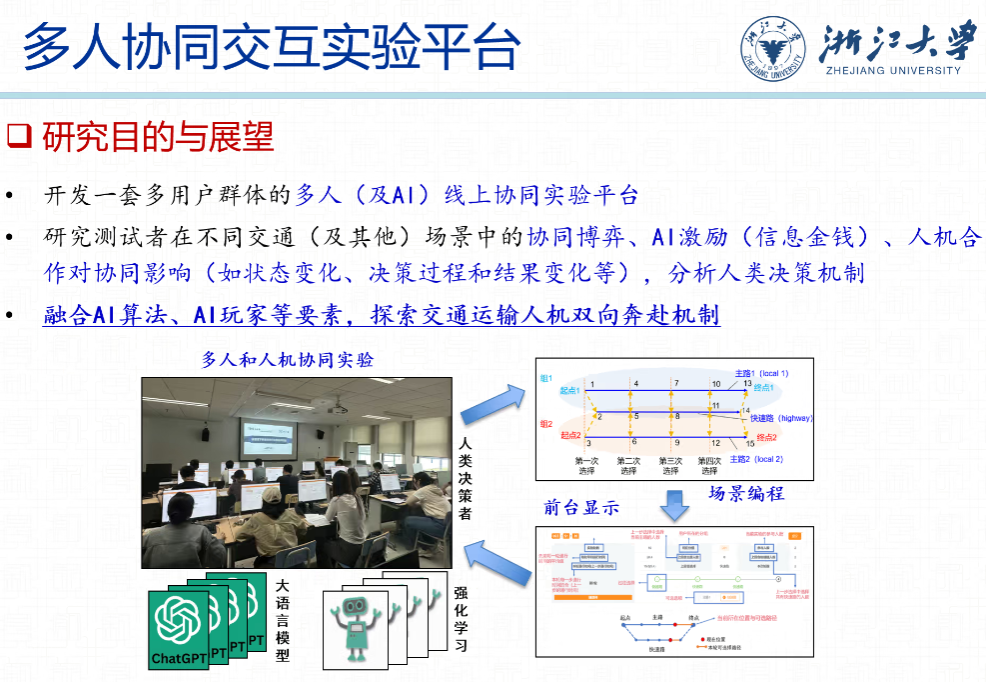
随后,朱政老师进一步介绍了实验室最新开发的“多人协同交互实验平台”。该平台是一套支持多用户群体(包括AI)的线上协同实验系统,用于研究不同交通场景下的协同博弈、AI激励及人机合作对系统状态的影响。实验通过分析状态变化、决策过程和结果变化等,深度挖掘人类决策机制与AI协同模式的潜力。这一实验平台还融入了AI算法及AI玩家等元素,旨在探索交通运输领域的人机双向竞争与合作机制,为未来智慧交通的协同优化提供重要支撑。
研究内容
随后,刘林坤同学带来了有关《基于信号传递博弈的EHMI作用机制研究》的内容,主要包括研究背景、无保护左转博弈决策模型、EHMI信息披露的影响、基于信号传递博弈的动态分析四个部分。

汇报时刻
在研究背景方面,刘林坤同学的研究聚焦于自动驾驶车辆(AV)与传统车辆(HV)在未来交通环境中的信息交互问题。随着自动驾驶技术的快速发展,到2030年,传统车辆仍将占据近50%的市场份额,这意味着AV与HV的交互将愈加频繁。然而,现有的决策算法偏向保守,同时驾驶意图和信息的传达存在困难。为解决这一问题,外部人机交互界面(EHMI)被提出,旨在通过图像或文字的形式,在车辆外部直观地展示驾驶状态与意图信息。这种技术不仅能实现AV与HV之间的信息传递,还可与行人、特殊车辆及基础设施等多种对象进行有效交互,但同时也面临信息真实性的挑战。刘林坤的研究正是在这一背景下展开,探索更安全、高效的交互解决方案。

研究内容
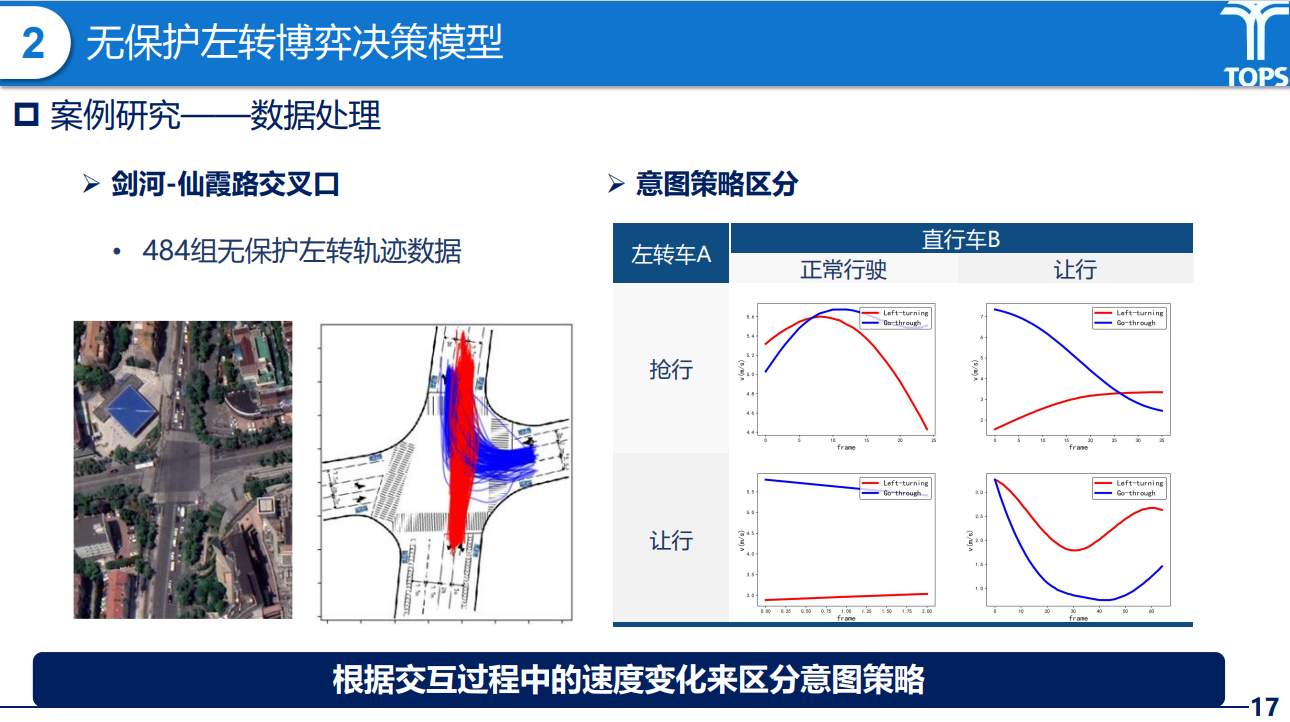
刘林坤同学的研究聚焦于无保护左转场景下的交通决策问题,基于博弈理论构建了左转车辆与直行车辆之间的决策模型。通过定义参与者的策略选择(如正常行驶或让行)以及支付函数,研究分析了不同策略组合下的效益与成本,尤其是抢行可能导致的冲突风险和让行带来的时间损失。研究中采用了Stackelberg博弈理论,构建了序贯博弈模型,并结合Logit模型进行数据参数标定,最终利用逆向归纳法识别出均衡点,预测驾驶者的最优策略。
研究内容
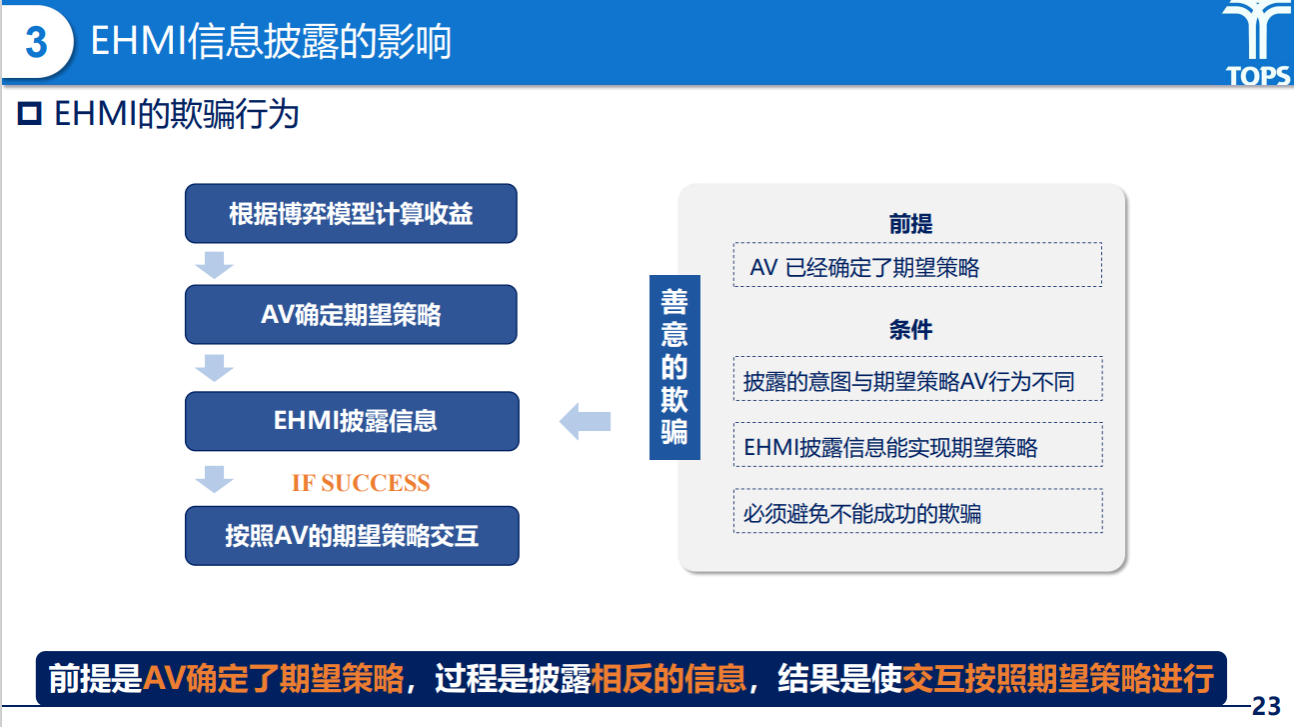
研究还涉及外部人机交互界面(EHMI)在自动驾驶车辆(AV)中信息披露的潜在影响,特别是“善意欺骗”的行为模型。研究指出,当AV通过EHMI披露信息时,可能存在故意披露与期望策略不一致的信息,以实现自身的最佳收益。这一过程的前提是AV已确定其期望策略,随后通过博弈模型计算收益,选择性披露信息。如果信息披露成功,AV将能够按照其期望策略与其他道路使用者交互,而避免不必要的风险。研究进一步探讨了善意欺骗的条件,包括披露的信息意图与期望策略行为的差异、信息是否能推动期望策略的实现,以及避免因披露失败而导致的潜在冲突。该研究为理解AV在复杂交通环境中的行为逻辑提供了新的视角,同时对EHMI设计提出了更高的要求,以确保信息披露的透明性与交互的安全性。
研究内容
研究进一步对基于信号传递的动态博弈进行了数值实验分析,探索EHMI在复杂交互场景中的作用。实验设置了HV(传统车辆)的响应时间为0.5秒,EHMI更新间隔为2秒,并模拟了不同的信任概率对交互的影响。研究发现,与没有EHMI的情况下相比,EHMI能够显著减少车辆通过冲突点的时间,从而提升交互效率。此外,随着HV对EHMI信息披露的信任程度提高,车辆交互的效率先减少后增加,显示了信任建立过程中的动态特性。

研究内容
在交流讨论环节,课题组的各位老师对研究给予了充分肯定,并提出了许多宝贵的建议。孙剑老师对汇报给予了高度评价,对朱政老师交通运输人机实验的研究表示认可,但同时建议进一步加强模型本身的可证明性。田野老师与朱政老师就学术界与工业界在研究方向和应用重点上的差异进行了深入讨论,为研究的实际落地提供了新思路。对于刘林坤同学的研究,与会老师和同学们围绕其EHMI信息披露的主题展开了热烈讨论。大家提出了许多建设性的问题和建议,尤其是针对研究中的关键技术点及下一步研究计划进行了深入交流。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}