2024年7月3日,TOPS第146期组会于通达馆A102线下举行。本次组会由22级硕士生蔡依林、石靖铖带来自己的研究进展汇报,分别与大家讨论交流《面向自动驾驶测试的机非交互风险场景识别与生成》和《基于自适应搜索的自动驾驶虚实测试对比验证》。课题组全体老师同学出席了本次组会。
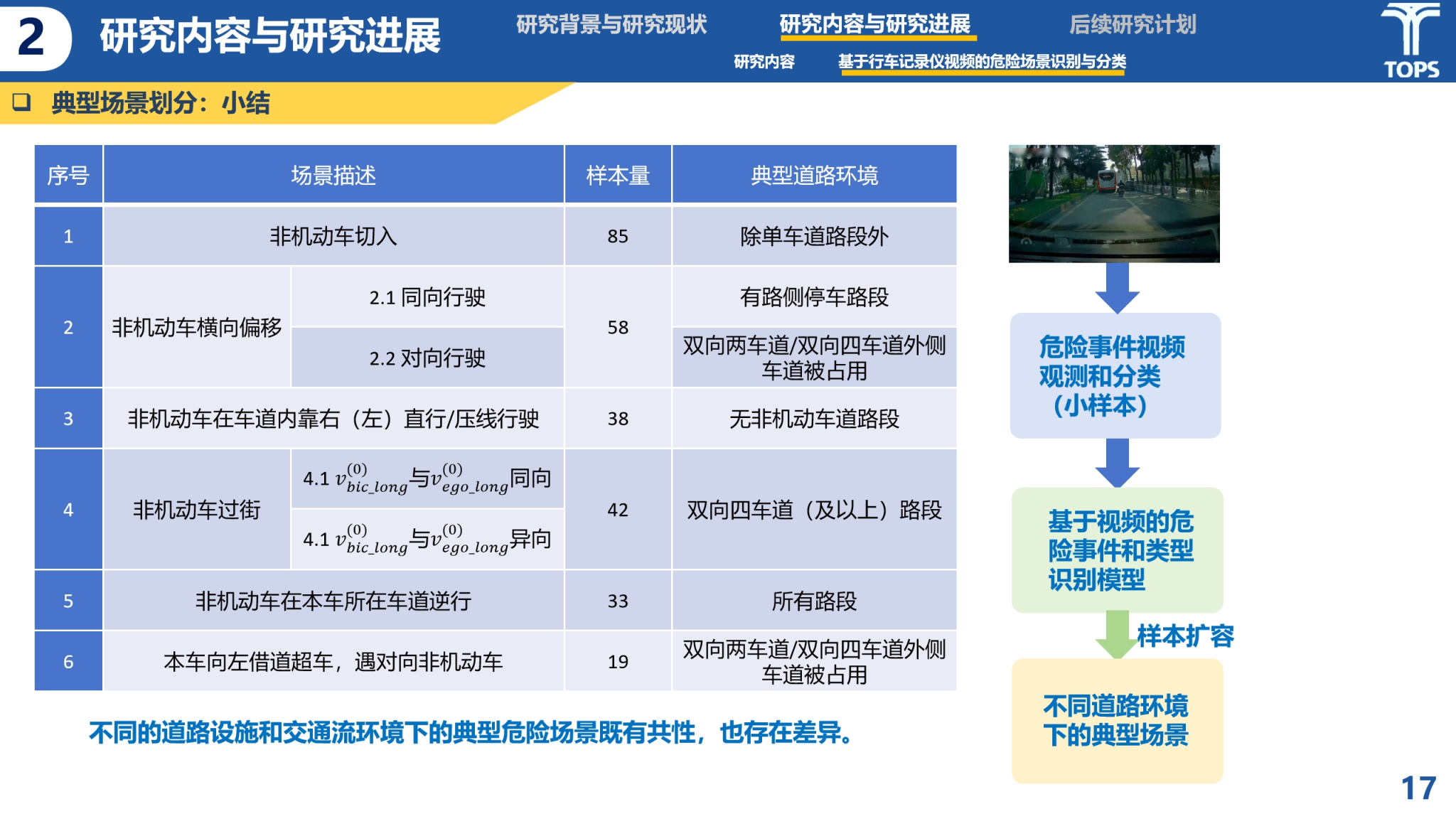
首先由蔡依林同学带来面向自动驾驶测试的机非交互风险场景识别与生成研究汇报。主要介绍了研究背景、研究内容、后续研究计划等方面。在背景阐述部分,蔡依林同学解释了验证和提升自动驾驶系统在机非交互场景下的安全性是其落地前需要解决的一大难题。结合道路交通环境特征识别高测试价值的机非交互危险场景,对构建自动驾驶测试场景库具有重要意义。分析研究现状发现,针对不同数据类型,提出了不同的危险事件识别方法,机器学习、深度学习识别效果优于传统阈值法。但是,虽然自然驾驶数据的数据量大、信息丰富,但是针对机非交互研究较少且场景要素考虑不够全面。目前的工作是基于自然驾驶数据,对机非交互风险场景进行识别。对D²City滴滴自然驾驶数据集中AV有测试价值且危险的交互样本量划分了6大类场景。然后进行基于行车记录仪视频的危险场景识别与分类,采用了YOLOv5识别非机动车,two-stream识别和分类模型构建,结合空间流网络和时间流网络的识别结果,实现对输入视频中的危险场景的识别。后续研究工作是危险场景识别模型完善,以及逻辑场景构建和具象场景生成。
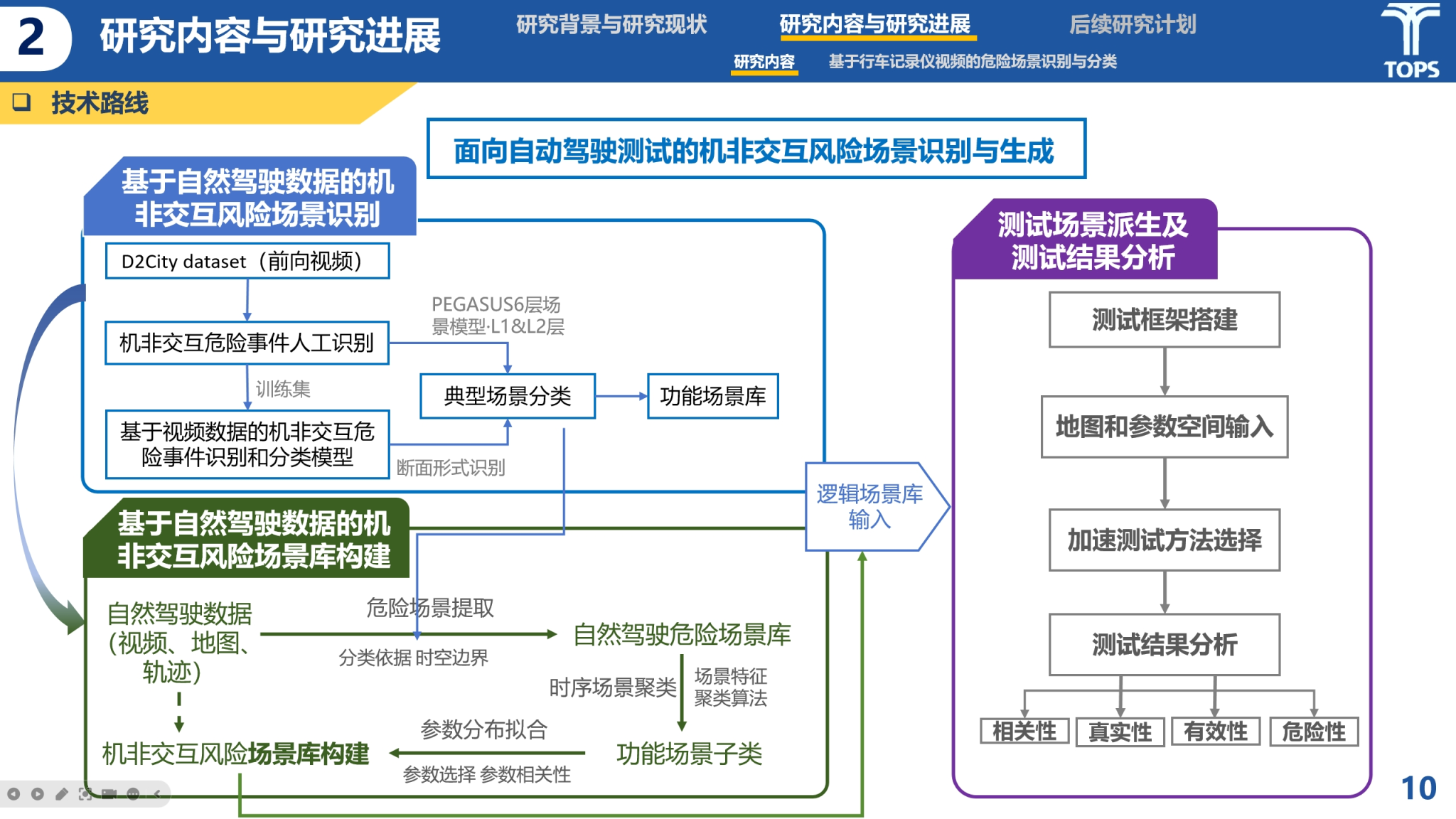
汇报内容
汇报内容
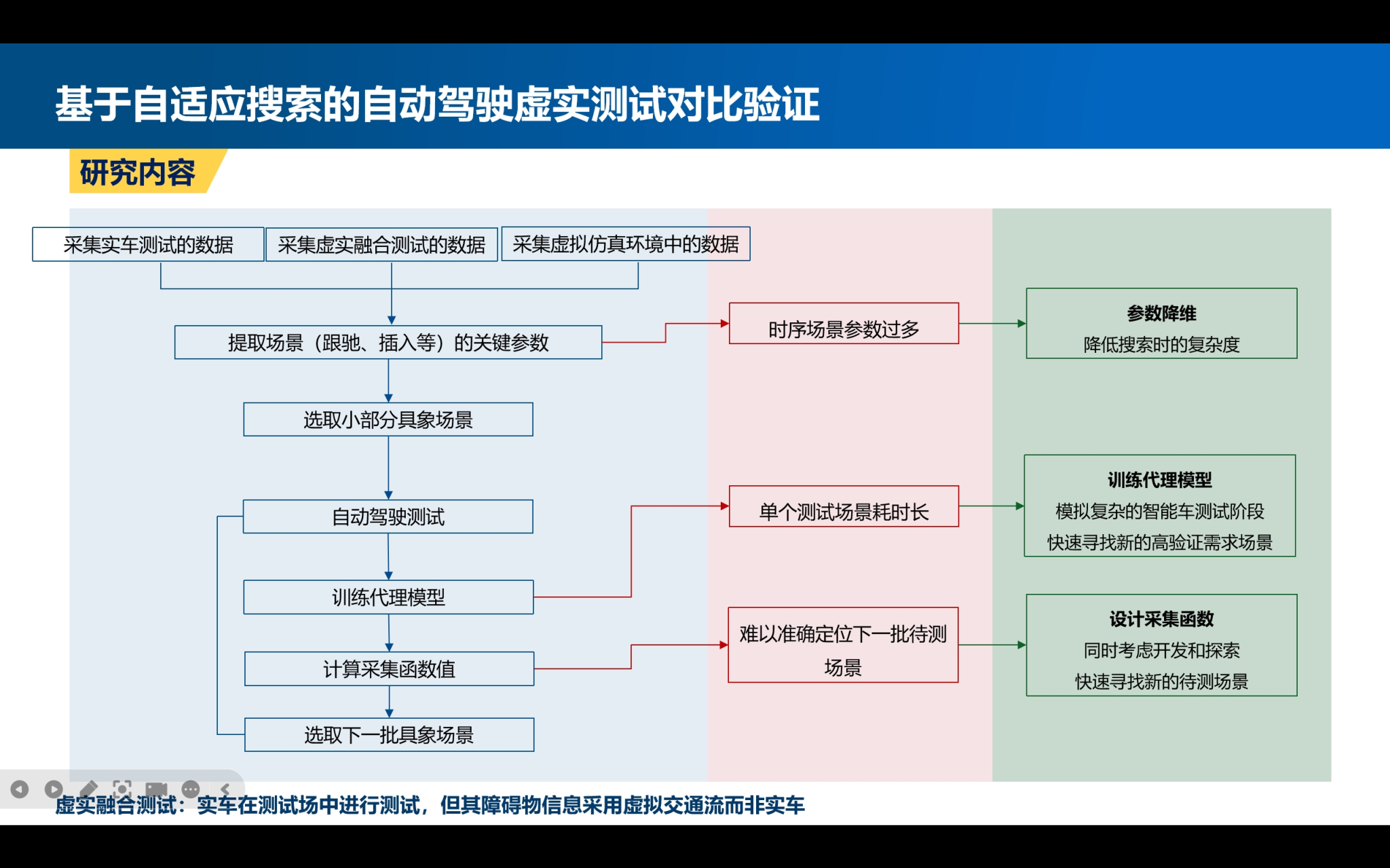
随后,石靖铖同学带来基于自适应搜索的自动驾驶虚实测试对比验证研究汇报。目前的仿真测试成本低、安全,且测试周期短,累计海量测试里程。但是存在建模仿真的置信度问题和场景泛化的置信度问题,因此需要寻找仿真测试与实地测试的最优的互补方式。研究聚焦于高验证需求场景的加速寻找与要素分析。阶段一是找到虚实测试中差异大的场景,以作为高验证需求的场景供后续对比;阶段是寻找这些场景的特征,从而得出什么要素可以由实变虚,什么不适合。目前已完成三种场景的参数化、六类代理模型比选,以及实验场景设计,通过自动驾驶测试管理平台,设计不同类型场景,组建实验场景库。采用双自动驾驶车来进行多次测试,查看主车的轨迹和转向角差异。研究意义在于基于虚实数据,为智能驾驶仿真测试提供可靠验证需求场景;有效增强加速测试方法的可行性和普适性,提高测试效率,减少测试次数,缩短测试周期;为不同仿真平台的不同要素进行置信度评估,对全面快速地测试智能汽车的安全性具有重要意义。

汇报内容
汇报内容
在讨论环节,课题组各位老师提出了宝贵的建议。孙剑老师提出需要对研究的实际意义需要作进一步的挖掘。倪颖老师对论文完成的进度和质量作出要求。杭鹏老师建议研究的逻辑链需要更加清晰。孙杰老师和梁浩阳老师对代理模型的选择和训练技术的具体细节进行了进一步讨论并提出相应建议。
电话:021-69583650 管理员邮箱:2015qgy@tongji.edu.cn
地址:上海市曹安公路4800号同济大学交通运输工程学院A440 邮编:201804
![]() TOPS课题组 页面浏览465,829次/访客70,123人次
TOPS课题组 页面浏览465,829次/访客70,123人次
{kind=link}